И основные расчетные соотношения
Принцип действия широтно-импульсного
Преобразователя напряжения
и основные расчетные соотношения
Упрощенная схема, иллюстрирующая принцип работы системы импульсного регулирования напряжения на тяговом двигателе, приведена на рис. 1, а. На этой схеме тиристорный преобразователь условно показан в виде контакта К. Цепь нагрузки преобразователя содержит сглаживающий реактор (дроссель) и тяговый двигатель, параллельно которым включен диод VD. Для уменьшения пульсаций магнитного потока обмотка возбуждения двигателя зашунтирована резистором Rш.
При замыкании ключа на нагрузку подается напряжение источника питания U и тока нагрузки iн начинает увеличиваться. Ток iн изменяется постепенно, так как при его возрастании в цепи нагрузки появляется ЭДС самоиндукции еLн, направленная встречно напряжению источника питания.
 (1.1)
(1.1)
где Lн - суммарная индуктивность дросселя и тягового двигателя. При замкнутом ключе к диоду VD приложено в обратном направлении напряжение источника питания и он закрыт. При размыкании ключа ток iн начинает уменьшаться, полярность ЭДС самоиндукции меняет знак и становится прямой для диода VD. Диод открывается и через него начинает протекать ток нагрузки под действием разности ЭДС самоиндукции и ЭДС Е, возникающей в якоре двигателя при его вращении. Напряжение на нагрузке при разомкнутом ключе равно напряжению на открытом диоде, т.е. практически равно нулю. При очередном замыкании ключа к диоду VD прикладывается обратное напряжение, он закрывается и двигатель получает питание от источника.
Так же как и в системе фазового регулирования при небольших пульсациях магнитного потока среднее значение на нагрузке Uн равно ЭДС Е. Из диаграммы uн на рис. 1, б
 , (1.2)
, (1.2)
где tи - длительность включенного состояния ключа (длительность импульса);
Т - период следования импульсов;
l- коэффициент заполнения импульсов
 . (1.3)
. (1.3)
Регулировать среднее значение напряжения на нагрузке Uн в процессе управления работой двигателя можно либо за счет изменения длительности импульса (широтное регулирование), либо за счет частоты следования импульсов ¦=1/Т (частотное регулирование).
Приняв активное сопротивление цепи нагрузки равным нулю, для интервала tи на основании второго закона Кирхгофа можно записать U + eLн - E = 0. Отсюда с учетом (1.1) - (1.3) и условия E = Uн получаем, что ток нагрузки меняется с постоянной скоростью

и за время импульса возрастает на величину
 . (1.4)
. (1.4)
На такую же величину ток снижается за время паузы между импульсами. Отношение DIн к среднему значению тока нагрузки Iн называется коэффициентом пульсаций kп. Продифференцировав и приняв к нулю первую производную DIн по l, получаем, что максимальный размах пульсаций DIн соответствует l = 0,5 и максимальный коэффициент пульсации равен
 . (1.5)
. (1.5)
Как видно из рис. 1, б, ток i, потребляемый от источника питания, имеет импульсный характер. При питании от контактной сети это недопустимо из-за большого уровня помех, наводимых на линии связи в моменты скачкообразного нарастания и спадания тока. Для уменьшения мешающего влияния работы импульсного преобразователя на линии связи используются входные фильтры. Простейший фильтр (рис.1, в) содержит дроссель с индуктивностью Lф и конденсатором с емкостью Сф. Благодаря последовательно включенной индуктивности ток сети при замыкании ключа К нарастает постепенно, а быстрое изменение тока ключа обеспечивается за счет разряда конденсатора. При размыкании ключа ток сети уменьшается также постепенно за счет протекания тока заряда Сф. При достаточно больших значениях Lф и Сф ток сети будет непрерывным и пульсирующим относительно среднего значения Ic (см. диаграмму iс на рис. 1, б). Пульсирующим будет и напряжение Uф на выходе фильтра. В (2, с. 205, 229-232) показано, что Ic= lIн, а размах колебаний напряжения на конденсаторе DUф и тока сети DIс достигает максимума при l = 0,5
 (1.6)
(1.6)
 (1.7)
(1.7)
Эти выражения получены путем линеаризации процессов изменения токов и напряжений фильтра и дают приемлемую погрешность при условии
¦³2¦ф, (1.8)
где fф - собственная частота колебательного контура, образованного емкостью
фильтра Сф и индуктивностями фильтра Lф и контактной сети Lкс.
 . (1.9)
. (1.9)
Условие (1.8.) должно строго выполняться, так как при резонансе частот f=fф и вблизи него пульсации  Iс и Uф будут во много раз превышать рассчитанные по формулам (1.6), (1.7).
Iс и Uф будут во много раз превышать рассчитанные по формулам (1.6), (1.7).
Рис. 2
Формулы (1.6) и (1.7) позволяют рассчитать Сф и Lф по известным значениям допустимых пульсаций, частоты и максимального тока нагрузки. У преобразователей большой мощности массогабаритные показатели рассчитанного фильтра могут оказаться неприемлемыми для практической реализации. В этом случае нужно переходить к многофазной системе регулирования, содержащей н5есколько тиристорных преобразователей, работающих со сдвигом во времени друг относительно друга. Это дает возможность уменьшить Сф и Lф за счет повышения частоты импульсов на выходе фильтра по сравнению с частотой работы преобразователей.
На рис. 2 приведена упрощенная схема системы импульсного регулирования напряжения на двигателях моторного вагона электропоезда, применительно к которой должен рассчитываться входной фильтр в курсовом проекте.
 |
В этой схеме ключи К1 и К2 переключаются с одинаковой частотой f при одинаковой длительности импульса, но импульсы эти сдвинуты друг относительно друга на половину периода рабочей частоты. В результате частота пульсаций
тока и напряжения на выходе фильтра будет равна 2f.
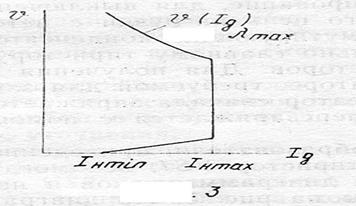
Рис. 3
При использовании непрерывных систем управления работой тягового двигателя, к которому относится система импульсного регулирования напряжения, процесс разгона поезда обычно автоматизируется. Типичная пусковая диаграмма, отражающая закон изменения т ока двигателя по мере набора скорости при наличии системы автоматического управления САУ. Для плавного трогания ускорения движения поезда должно нарастать постепенно, начиная с определенного значения, которое зависит от тока двигателя. Этот ток определяет минимальное значение тока нагрузки преобразователя Iн min.
Темп возрастания тока двигателя задается САУ и обеспечивается за счет плавного увеличения  . После достижения значения тока Iн max, которое обычно ограничивается условиями сцепления колес с рельсами, САУ поддерживает ток постоянным. Максимальная скорость, до которой обеспечивается стабилизация тока двигателя при разгоне, зависит от максимального коэффициента заполнения max. После этого ток меняется по скоростной характеристике двигателя при максимальном напряжении на нем
. После достижения значения тока Iн max, которое обычно ограничивается условиями сцепления колес с рельсами, САУ поддерживает ток постоянным. Максимальная скорость, до которой обеспечивается стабилизация тока двигателя при разгоне, зависит от максимального коэффициента заполнения max. После этого ток меняется по скоростной характеристике двигателя при максимальном напряжении на нем
где mд - число последовательно соединенных двигателей нагрузке преобразо-
вателя.
У преобразователей электроподвижного состава магистральных железных дорог mд обычно равно 2. САУ может также работать в режиме поддержания заданной скорости, стабилизация которой осуществляется также за счет изменения .
Значение Iн max и Iн min указаны в таблице исходных данных для расчета преобразователя. Диапазон токов характерен для двигателей электропоездов. Там же приведены максимальная Umax и минимальное Umin значения напряжения на входе преобразователя, нестабильность которого связана с колебаниями напряжения в контактной сети и потерями напряжения во входном фильтре.
Разработано большое количество схем тиристорных преобразователей, выполняющие функции ключа К. В большинстве схем, позволяющих реализовать широтное регулирование для выключения главного тиристора, соединяющего цепь нагрузки с источником питания, используется коммутирующий конденсатор, который подключается параллельно главному тиристору с помощью вспомогательных тиристоров. Для получения полярности напряжения на конденсаторе, требуемой для запирания главного тиристора, конденсатор сначала заряжается от источника питания, а затем перезаряжается с помощью колебательного LC контура.
В схеме преобразователя, приведенной на рис.3, а, главным является тиристор VS1, вспомогательным - тиристор VS2. Временные диаграммы токов и напряжений элементов схемы приведены на рис.4. На диаграммах прямые напряжения на тиристорах показаны положительными, обратные напряжения на тиристорах и диодах - отрицательными. При построении диаграмм и при выводе расчетных соотношений приняты следующие допущения:
напряжение на открытом диоде и тиристоре равно нулю;
пульсации тока нагрузки равны нулю;
пульсации напряжения источника питания равны нулю;
активное сопротивление всех элементов схемы равно нулю;
ток удержания тиристоров равен нулю.
Рис-4
В тех случаях, когда эти допущения приводят к появлению существенной ошибки в результатах расчетов, будут сделаны необходимые уточнения.
Работа преобразователя начинается с включения тиристора VS2. При этом конденсатор С заряжается от источника U через открытый VS2, сглаживающий дроссель Lн и двигатель. Полярность напряжения на конденсаторе показана на рис. 3, а без скобок. При uс=U ток заряда ic снижается до нуля и тиристор VS2 закрывается.
При включении тиристора VS1 напряжение источника U падает на нагрузку и одновременно собирается колебательный контур, содержащий заряженный конденсатор С, открытый VS1, дроссель L и диод VD1. Конденсатор С начинает разряжаться, т. е. напряжение uc начинает уменьшаться. Появление тока разряда конденсатора ic приводит к появлению в дросселе L э. д. с. самоиндукции eL
 (1.10)
(1.10)
Законы изменения uc и ic находятся путем решения систем уравнений
uc + eL = 0; (1.11)
 (1.12)
(1.12)
С учетом того, что при t=0 uc=U, получаем
ic = Imsinw0t (1.13)
uc = Ucosw0t (1.14)
где  - собственная частота колебательного контура
- собственная частота колебательного контура
 (1.15)
(1.15)
Im - амплитудное значение тока контура
 (1.16)
(1.16)
Рис-5
Диаграммы uc и ic приведены на рис. 3, б. До тех пор пока ток контура возрастает, полярность напряжения на конденсаторе соответствует начальной (показана на рис. 3,а без скобок). После того как ток ic достигает Im, он начинает уменьшаться, т. е. меняется знак производной тока и, соответственно, полярность э. д. с. самоиндукции eL, под действием которой и происходит перезаряд конденсатора С. Для продолжения колебательного процесса после заряда конденсатора до uc=U (полярность uc показана на рис. 3, а в скобках) ток в контуре должен поменять направление. Так как этому препятствует диод VD1, колебательный процесс прекращается и конденсатор остается перезаряженным. Как следует из рис. 3, б длительность tп процесса перезаряда конденсатора равна длительности полупериода собственных колебаний контура. С учетом (1.15) из условия tп=  получаем
получаем
 . (1.17)
. (1.17)
При рассмотрении процесса перезаряда конденсатора активное cопро-
тивление контура r было принято равным нулю. Наличие потерь на этом сопротивлении приводит к тому, что колебания будут затухающими и напряжение на конденсаторе в момент окончания его перезаряда будет меньше начального значения U. Коэффициент kз, учитывающий это снижение, называется коэффициентом затухания. Значение kз зависит от соотношения r, С, и L. Выражение для его расчета можно получить, заменив ноль в правой части равенства (1.11) на icr. У существующих импульсных преобразователей kз=0,7 - 0,8. Время перезаряда при учете r меняется в меньшей степени и может рассчитываться по формуле (1.17).
Перезаряженный конденсатор используется для выключения тиристора VS1. Для этого включается тиристор VS2 и напряжение конденсатора С оказывается приложенным к тиристору VS1 в обратном направлении. Тиристор VS1 закрывается, а напряжение на выходе преобразователя скачком увеличивается до значения U+kзU, так как последовательно с источником U в цепь нагрузки оказывается включенным заряженный до напряжения kзU конденсатор C. Одновременно начинается процесс заряда конденсатора С от источника U через открытый VS2 и цепь нагрузки. Так как по условию ток нагрузки неизменен, конденсатор заряжается постоянным током Iн
Отсюда следует, что напряжение uc меняется по линейному закону со скоростью
 (1.18)
(1.18)
В процессе заряда конденсатора напряжение на закрытом тиристоре VS1 равно напряжению на конденсаторе, так как напряжение на открытом VS2 практически равно нулю. Поэтому до тех пор, пока напряжение на uc не снизится от величины kзU до нуля, к тиристору VS1 будет прикладываться обратное напряжение. Время tс в течении которого к главному тиристору после его запирания прикладывается обратное напряжение, называется схемным временем. С учетом (1.18)
 (1.19)
(1.19)
В момент окончания заряда конденсатора напряжение на нагрузке снижается до нуля, открывается диод VD2 и через него начинает протекать ток нагрузки под действием э. д. с. самоиндукции eLн.
Время tk в течении которого напряжение на конденсаторе меняется от - kзU до U, т. е. на величину Uc=kзU+ U, принято называется коммутационным интервалом
 . (1.20)
. (1.20)
При очередном включении VS1 к диоду VD2 прикладывается обратное напряжение, ток нагрузки перекоммутируется в цепь VS1 и цикл работы преобразователя повторяется.
Среднее значение напряжения на нагрузке
 (1.21)
(1.21)
где tсу - временной интервал между управляющими сигналами с системы управ-
ления на включение VS1 и VS2 ( время “сдвига” управляющих импуль-
сов).
Для обеспечения надежной работы преобразователя тиристор VS2 должен включаться не раньше, чем закончится колебательный процесс перезаряда конденсатора, т. е. tсу  tп. С учетом этого ограничения минимальное напряжение на нагрузке
tп. С учетом этого ограничения минимальное напряжение на нагрузке
 (1.22)
(1.22)
где  . (1.23)
. (1.23)
Тиристор VS1 должен включаться не ранее, чем закончится заряд С. Это условие ограничивает максимальное напряжение на нагрузке Uн max. Для получения Uн max тиристор VS1 должен включаться в момент окончания интервала tk, что соответствует tсу=T - tk
 (1.24)
(1.24)
Из (1.24) легко получить выражение для расчета максимального коэффициента заполнения
 (1.24)
(1.24)
Дата добавления: 2015-09-25; просмотров: 1027;