СОСТАВЛЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ СРЕДСТВ ИЗМЕРЕНИЙ НА ОСНОВАНИИ ЗАКОНА СОХРАНЕНИЯ ЭНЕРГИИ
Уравнения математических моделей преобразователей или других связанных систем, выполняющих, например, преобразование энергии одного вида в другой, можно получить, используя два подхода.
Во-первых, исходя из положения, что динамическая траектория системы определяется путем нахождения экстремума некоторых интегральных функций(интегральный принцип). В этом случае вначале устанавливается общая терминология для всех типов преобразователей: электрических, механических, химических, тепловых и т. д. введением энергетических функций (силовых функций) от обобщенных переменных. Затем, используяодин из основных принципов, например принцип Гамильтона или получаемые из него уравнения Лагранжа, находят динамические уравнения для всех преобразователей, включая уравнения всех связей.
Во-вторых, используются бесконечно малые изменения в измерительной цепи(дифференциальный принцип). В этом случае уравнения движения преобразователей получают на основании законов физики, используя при этом, например, для получения механических сил электрического происхождения принцип возможных перемещений и закон сохранения энергии или плотность сил электромагнитного ПОЛЯ.
С точки зрения формализации и сложности трудно отдать предпочтение какому-либо из этих методов. Получение динамических уравнений на основании законов физики и принципа возможных перемещений, очевидно, наименее формально. Но когда рассматривается сложная измерительная цепь, содержащая большое количество переменных, необходимы интуиция и изобретательность. Интегральный метод является наиболее мощным методом механики, однако очень формализован, а потому физическая ясность задачи может быть затенена математическими выкладками.
Сущность и применение метода составления уравнений математических моделей с использованием принципа возможных перемещений и закона сохранения энергии рассмотрим на примере измерительных цепей, содержащих механические, электростатические, электромагнитные и электромеханические преобразователи.
В процессе физического описания СИ или составления структурной схемы в измерительной цепи выделим преобразователи механических величин в механические и электрических в электрические. Такими будут механические преобразователи, в которых не появляются силы электрического происхождения, а в электрических цепях не проявляется эффект механического движения. Кроме того, выделим преобразователи или часть измерительной цепи, содержащие поля связей. Тогда для механической части измерительной цепи уравнения можно получить, исходя из принципа Д'Аламбера:
 ( 4.1)
( 4.1)
где  — i-я внешняя сила, приложенная к k-му узлу;
— i-я внешняя сила, приложенная к k-му узлу;  — j-я - инерционная сила k-го узла;
— j-я - инерционная сила k-го узла;  — j-я механическая сила, включающая любые силы связи, приложенная к k-му узлу.
— j-я механическая сила, включающая любые силы связи, приложенная к k-му узлу.
Принцип динамического равновесия (4.1) необходимо дополнить также соотношениями непрерывности пространства
 (4.2)
(4.2)
где  — i-я скорость в k-м механическом контуре.
— i-я скорость в k-м механическом контуре.
Аналогично принципу динамического равновесия (4.1) и соотношениям непрерывности пространства (4.2) для электрической части цепи уравнения можно получить на основании двух правил [44] Кирхгофа:
правила узлов
 (4.3)
(4.3)
правила контуров
 (4.4)
(4.4)
где  — i-й ток в к-м узле;
— i-й ток в к-м узле;  — i-е напряжение в k-м контуре.
— i-е напряжение в k-м контуре.
Для электрической части цепи в зависимости от ее разновидностей могут быть также использованы законы Ома, Кулона и Фарадея.
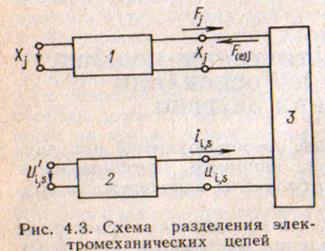
В измерительной цепи или преобразователях, содержащих поля связей, выделим три схемы (рис. 4.3): 1 — внешняя механическая схема; 2 — внешняя схема, содержащая элементы-накопители энергий электрического и магнитного полей; 3 — консервативная электромеханическая схема, содержащая только поля связей — электрические и магнитные. На механические зажимы  схемы 3 поступают силы
схемы 3 поступают силы  или, иначе говоря, проявляется эффект механического движения в электрических цепях полей связи. С другой стороны, на эти зажимы со схемы 3 поступают силы
или, иначе говоря, проявляется эффект механического движения в электрических цепях полей связи. С другой стороны, на эти зажимы со схемы 3 поступают силы  электрического происхождения (электромеханической связи). На зажимы
электрического происхождения (электромеханической связи). На зажимы  , связанные с накопителями энергии электрического поля, и
, связанные с накопителями энергии электрического поля, и  , связанные с накопителями энергии магнитного поля, поступают энергии со схем 2 и 3 как следствие механического движения.
, связанные с накопителями энергии магнитного поля, поступают энергии со схем 2 и 3 как следствие механического движения.
Для составления уравнений механической 1 и электрической 2 схем можно использовать, например, принцип Д'Аламбера и уравнения Кирхгофа. В эти схемы могут быть включены и другие преобразователи: механические, электрические. Однако они не соединяются со схемой 3, как не содержащие полей связи, и в множества i,j,s не входят. Согласно схеме рис. 4.3, остаются неизвестными силы связи и энергии, или эффект механического движения, проявляющийся в полях связей схемы 3. Определим их.
Если электромеханическая измерительная цепь может быть представлена сосредоточенными параметрами, то
 (4.5)
(4.5)
где W — полная накопленная энергия в связанной схеме 3 (рис. 4.3);  — накопленная энергия электрических полей связи;
— накопленная энергия электрических полей связи;  — накопленная энергия магнитных полей связи. Кроме того. запасенная энергия должна быть силовой функцией — однозначной функцией переменных и независимой от динамического состояния и предыстории [42], иными словами, функцией мгновенной конфигурации цепи:
— накопленная энергия магнитных полей связи. Кроме того. запасенная энергия должна быть силовой функцией — однозначной функцией переменных и независимой от динамического состояния и предыстории [42], иными словами, функцией мгновенной конфигурации цепи:
 (4.6)
(4.6)
где  — напряжение и заряд 1-й емкости:
— напряжение и заряд 1-й емкости:
 (4.7)
(4.7)
 (4.8)
(4.8)
 — потокосцепление и ток в 5-й индуктивности:
— потокосцепление и ток в 5-й индуктивности:
 (4.9)
(4.9)
 (4.10)
(4.10)
 — механические перемещения и сила:
— механические перемещения и сила:
 (4.11)
(4.11)
 (4.12)
(4.12)
Поскольку функциональные зависимости (4.6...4.12) однозначны и в них не включено рассеяние, то из шести переменных независимыми могут быть только три, например: 

 Остальные три должны удовлетворять уравнениям связей (4.6), (4.9), (4.12), и, следовательно, полная энергия в полях связи
Остальные три должны удовлетворять уравнениям связей (4.6), (4.9), (4.12), и, следовательно, полная энергия в полях связи
 (4.13)
(4.13)
Эта энергия может быть определена, например, суммированием всех энергий (электрической и механической), подводимых к парам зажимов схемы 3 (рис. 4.3) при изменении переменных от нуля до их конечных значений:

Систему переменных к их конечным значениям можно привести произвольно. Например, сначала «собрав» систему механически, поддерживая при этом  и
и  равными нулю (при этом сначала =0, а потом =0 или наоборот), установить конечные значения и. . При этом
равными нулю (при этом сначала =0, а потом =0 или наоборот), установить конечные значения и. . При этом  = const, а следовательно, и последнее слагаемое уравнения (4.14) будет равно нулю.
= const, а следовательно, и последнее слагаемое уравнения (4.14) будет равно нулю.
Уравнения (4.7) и (4.8) могут быть решены, если и заданы как функции конфигурации системы, например исходя из законов Фарадея и Кулона. Эти уравнения необходимо учесть во внешней электрической схеме как следствие эффекта механического движения.
Для нахождения силы (рис. 4.3) используем принцип возможных перемещений, считая, что при изменении  за время dt все остальные
за время dt все остальные  = 0 и эта сила электрического происхождения (связи) приложена к k-му механическому узлу. За время dt должен удовлетворяться закон сохранения энергии
= 0 и эта сила электрического происхождения (связи) приложена к k-му механическому узлу. За время dt должен удовлетворяться закон сохранения энергии
 (4.15)
(4.15)
где  — энергия, поступающая на механические зажимы k-го узла (при = const);
— энергия, поступающая на механические зажимы k-го узла (при = const);  — энергия, поступающая на электрические зажимы из внешней схемы.
— энергия, поступающая на электрические зажимы из внешней схемы.
Рассеяние не может быть учтено в полях связей. Учесть его необходимо во внешних электрической и механической схемах, например, введением активного сопротивления.
Из уравнения (4.15) находим силу электромеханической связи:
 (4.16)
(4.16)
Силу F(e)k необходимо включить во внешнюю механическую схему 1 (рис. 4.3) и она подчиняется принципу Д'Аламбера (4 1) как одна из сил связей . Другими словами, эта сила есть действительная сила, несмотря на внешние связи, которые могут быть наложены на связанную схему от сторонних электрической и механической схем (источников).
Поскольку при определении  для возможного перемещения должны удовлетворяться только внутренние связи, электрические переменные могут меняться произвольно, но в соответствии с уравнениями (4.6) и (4.10).
для возможного перемещения должны удовлетворяться только внутренние связи, электрические переменные могут меняться произвольно, но в соответствии с уравнениями (4.6) и (4.10).
Рассмотрим случай, когда механическая схема связана только с накопителями энергии магнитного поля. Тогда из (4.16) механические силы в магнитном поле
 (4.17)
(4.17)
так как

 и
и 
Предположим, что имеет место возможное перемещение к-го механического узла. При этом = 0 (  ). Тогда при выборе в качестве независимых переменных выбираются
). Тогда при выборе в качестве независимых переменных выбираются  и
и  следовательно,
следовательно,
 (4.18)
(4.18)
и
 (4.19)
(4.19)
Полные дифференциалы, входящие в уравнение (4.17) ,
 (4.20)
(4.20)
 (4.21)
(4.21)
Накопленная магнитная энергия определяется при приведении сначала механических, а затем электрических переменных к их конечным значениям из выражения(4.14):
 (4.22)
(4.22)
Первый член в скобках правой части (4.17) с учетом (4.21) запишется как
 (4.23)
(4.23)
Для нахождения силы подставим(4.20) и (4.23) в (4.17), изменив при этом индексы в последнем слагаемом(4.23) и сгруппировав члены:
 (4.24)
(4.24)
Хотя  и
и  при возможном перемещении могут изменяться произвольно, но сила не зависит от этих изменений, следовательно, коэффициент при
при возможном перемещении могут изменяться произвольно, но сила не зависит от этих изменений, следовательно, коэффициент при  в (4.23) должен равняться нулю:
в (4.23) должен равняться нулю:
 (4.25)
(4.25)
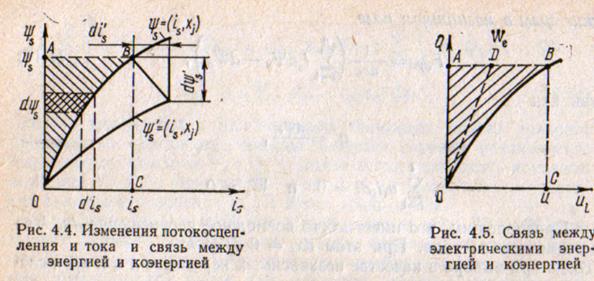
На рис. 4.4 показаны типичные зависимости потокосцепления для s-ro контура и, например,  при x'k = xk + dxk. Каждому приращению соответствует приращение
при x'k = xk + dxk. Каждому приращению соответствует приращение  , а также
, а также  соответственно
соответственно  . Следовательно, во-первых, уравнение (4.25) справедливо, во-вторых, поскольку не зависит от то она не зависит также и от .
. Следовательно, во-первых, уравнение (4.25) справедливо, во-вторых, поскольку не зависит от то она не зависит также и от .
Тогда из (4.24) окончательное выражение для силы
 (4.26)
(4.26)
Магнитная энергия определяется уравнением (4.22) и изображена для s-го контура на рис. 4.4 площадью ОAВ. Интегрируя по частям (4.22), найдем другое выражение для магнитной энергии:
 (4.27)
(4.27)
(( ) (4.22)) – повтор!!!
Последнее слагаемое уравнения (4.27) представляет собой магнитную коэнергию  , изображенную для s-го контура на рис. 4 4 площадью ОВС. Соотношения между магнитными энергией и коэнергией из (4.27):
, изображенную для s-го контура на рис. 4 4 площадью ОВС. Соотношения между магнитными энергией и коэнергией из (4.27):
 (4.28)
(4.28)
---------------------------------------------
 – коєнергия (независимые переменные
– коєнергия (независимые переменные  )
)
--------------------------------------------
Тогда сила через магнитную коэнергию выразится как
 (4.29)
(4.29)
Уравнения (4.26) и (4.29) дают силу при независимых переменных и . В случае новой пары независимых переменных и  и , а следовательно,
и , а следовательно,

из (4.17) после аналогичных преобразований можно получить
 (4.30)
(4.30)
 (4.31)
(4.31)
====================================
 – коєнергия (неззавис. перем.
– коєнергия (неззавис. перем.  )
)
===================================================
Четыре выражения (4.26), (4.29), (4.30), (4.31) для равнозначны и дают силу для данных значений -, и . Сила совместно с принципом Д'Аламбера и уравнениями Кирхгофа дает уравнения динамического равновесия, которые могут быть использованы для составления математической модели СИ, содержащих связанные преобразователи.
ПРИМЕР ДЛЯ ПРАКТИЧЕСКОГО ЗАНЯТИЯ
Дата добавления: 2015-11-18; просмотров: 854;