МАТЕМАТИЧЕСКИЕ МОДЕЛИ СРЕДСТВ ИЗМЕРЕНИЙ С УЧЕТОМ НЕЛИНЕЙНОСТЕЙ
Большинство СИ в общем случае описываются нелинейными уравнениями. Предположение о малых отклонениях измеряемой величины или использование, например, только линейной части характеристик преобразователей, в ряде случаев позволяет проводить их исследование как линейных, состоящих из линейных преобразовательных элементов. Однако при значительных изменениях измеряемой величины и более детальном изучении процессов, происходящих в измерительных цепях, необходимо строже учитывать явления, считавшиеся второстепенными и влекущими за собой появление существенных нелинейностей в статических и динамических характеристиках. Так, например, в преобразователях, содержащих механические элементы, зачастую не учитываются такие принципиально нелинейные явления, как сухое трение и влияние зазоров (люфтов), ограничений и упоров. Это может вызвать значительные погрешности и даже принципиальные ошибки при расисте и проектировании СИ.
К нелинейным СИ относятся такие, которые содержат хотя бы один преобразователь, описываемый нелинейным уравнением. К нелинейным преобразователям в общем случае могут быть отнесены преобразователи, имеющие зависимости между входом и выходом: релейного типа; с кусочно-линейной характеристикой; с криволинейной характеристикой любого очертания; в виде уравнений, которые содержат произведение переменных или их производных и другие комбинации; нелинейные импульсные; логические, описываемые кусочно-линейными дифференциальными уравнениями.
В общем случае при составлении математической модели нелинейных СИ придерживаются следующей последовательности: как и для линейных СИ на основании выявленных преобразований составляется структурная схема, а затем — математические модели преобразователей; производится линеаризация всех уравнений преобразовательных элементов, где это допустимо, кроме существенно нелинейных, которых бывает, как правило, не более одного-двух; уточняются структурная схема и математическая модель.
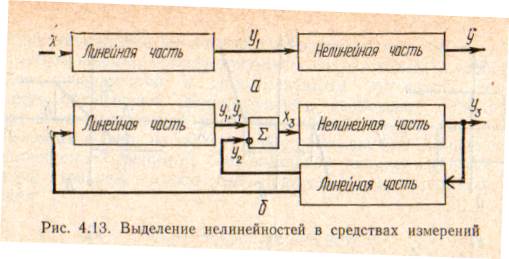
В процессе уточнения структурной схемы стремятся выделить линейную часть СИ, описываемую обыкновенными линейными дифференциальными уравнения, и нелинейные преобразователи. Уравнение нелинейного преобразователя должно быть наиболее простым. Например, иногда удается выделить нелинейный элемент так, чтобы зависимость между выходной и входной величинами была непосредственной (рис. 4.13, а).
Однако в некоторых случаях это сделать не удается и приходится исследовать более сложные зависимости:

 и т. д.
и т. д.
При этом если под знак нелинейной функции входит какая-либо линейная комбинация разных переменных, то целесообразно ее обозначить одной переменной, например (рис. 4.13,6)

Тогда, обозначив
 (4.99)
(4.99)
можно привести уравнение нелинейного элемента к простому виду:
После преобразования и уточнения структурной схемы составляется одно или система дифференциальных уравнений линейной части средства измерений, например
 ,
,
где А (р), В (р) — операторные многочлены.
Причем в это уравнение должны быть включены и соотношения типа (4.99), получаемые при выделении нелинейностей. Эти уравнения или система совместно с уравнениями нелинейностей и являются основой для дальнейших исследований нелинейного СИ.
Нелинейные уравнения СИ, например, с произведением переменных или их производных, криволинейными характеристиками и т. д., то есть не содержащие разрывов, резких изломов и др., могут быть получены с использованием обычных методов: уравнений Лагранжа, законов физики, принципа возможных перемещений и закона сохранения энергии. Поэтому рассмотрим лишь СИ с преобразователями, имеющими существенные нелинейности. При этом считаем, что, согласно структурному методу, эти преобразователи выделены и для линейной части составлена математическая модель на основании методов, описанных в настоящей главе.
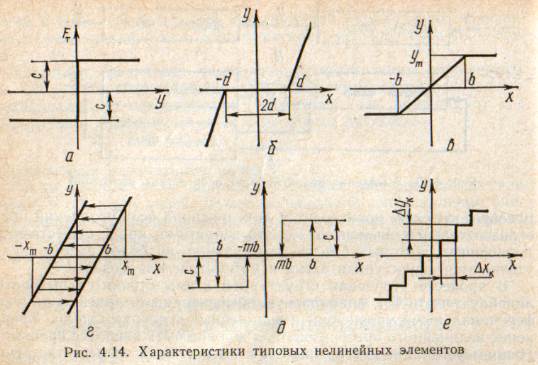
Проанализируем наиболее распространенные характеристики существенно нелинейных элементов: сухое, или кулоновское, трение; нечувствительность; ограничение; люфт; гистерезис; скачкообразное изменение величин; наличие упоров. Характеристики этих элементов при определенных допущениях могут быть достаточно хорошо представлены кусочно-линейными кривыми, которые называют типовыми статическими характеристиками.
а) Нелинейности типа сухого трения (рис. 4.14, а), как правило, присущи элементам, содержащим трущиеся поверхности: подвижные части показывающих приборов, кинематические пары электромагнитных, емкостных и других преобразователей. При этом в таких элементах имеется, по крайней мере, три типа сил сопротивления, объединяемых термином «трение»: вязкое трение; трение покоя; кулоновское трение.
При составлении динамических уравнений чаще всего учитывается вязкое трение, пропорциональное относительной скорости трущихся поверхностей и способствующее затуханию движения, то есть обладающее демпфирующим свойством. Трение покоя имеет место только при равенстве нулю относительной скорости. Кулоновское трение не зависит от скорости движения и обладает постоянной силой трения  . Следовательно, нелинейный эффект, вызванный трением, может быть описан характеристикой сухого трения:
. Следовательно, нелинейный эффект, вызванный трением, может быть описан характеристикой сухого трения:
 при
при  (4.100)
(4.100)
 при у = 0,
при у = 0,
где у — относительная скорость поверхностей; с — постоянная величина.
Если скорость у = 0, сила трения может принимать любое значение в интервале –с; с].
б) Нелинейность типа зоны нечувствительности (рис. 4.14, б) имеет место в ИП, нечувствительных к малым входным сигналам, например в индуктивных, емкостных, потенциометрических, тахогенераторах и др. Эта нелинейность может быть описана зависимостью

 (4.101)
(4.101)
где d — постоянная величина, определяющая ширину зоны чувствительности по отношению ко входному сигналу x; k — коэффициент преобразования.
в) Нелинейность типа «насыщение» (рис. 4.14, в), или «ограничение», присуща множеству ИП, других механизмов и устройств и является следствием, например ограничения по мощности в усилительно- преобразовательных элементах, исполнительных устройствах, параметрических преобразователях и т. д. В данном случае преобразователь может рассматриваться как линейный в некотором диапазоне изменения входного сигнала, но при достижении сигналом определенного значения преобразователь становится нечувствительным к его дальнейшему изменению.
Математическое описание нелинейности типа «насыщение»:

 (4.102)
(4.102)
где b — величина, определяющая значение входного сигнала, при котором наступает насыщение в преобразователе; ут — максимально возможное значение выходного сигнала.
г) Нелинейность типа «зазор» (рис. 4.14, г) имеет место почти во всех механических соединениях. Зазор, или люфт, характеризуется величиной перемещения одного из сопряженных элементов соединения, не вызывающего перемещения другого, ведомого элемента. Математическая модель нелинейности имеет вид
 (4.103)
(4.103)
где 2b — ширина петли гистерезисного вида; хт — амплитуда входного сигнала.
Как видно из уравнений (4.103), характеристика относится к классу многозначных, поскольку каждому значению входного сигнала х может соответствовать множество значений выходного сигнала у. Следует заметить, что некоторые ИП, имеющие нелинейности типа сухого трения, описываются нелинейностью в виде зазора. Это бывает, когда преобразователи содержат сравнительно легкие подвижные части и влиянием массы можно пренебречь.
д) Нелинейность типа «трехпозиционное реле» (рис. 4.14, д) имеет место при использовании в измерительных пенях релейных или коммутационных элементов, гидравлических или пневматических клапанов, фрикционных муфт и т. д. Эта нелинейность имеет неоднозначную характеристику с высшим и низшим уровнями выходной величины [с; —с], зоной нечувствительности шириной 2b и петлей гистерезиса шириной (b — mb) «трехпозиционное реле с гистерезисом». При этом коэффициент т принимает значение в интервале [—1; 1].
В идеальном случае, когда скачкообразное изменение выходного сигнала с нулевого на высший или низший уровни и наоборот происходит при одном и том же значении входного сигнала, то есть m = 1, получим характеристику трехпозиционного реле без гистерезиса. Математическая модель в виде однозначной характеристики с разрывом в данном случае будет
 (4.104)
(4.104)
С учетом неоднозначности характеристики в интервале изменения входного сигнала [—b + тb; b — тb] математическая модель нелинейности типа «трехпозиционное реле» с гистерезисом выражается зависимостью
 (4.105)
(4.105)
Нетрудно убедиться, что, если положить т = 0, получим характеристику двухпозиционного реле с петлей гистерезиса, имеющего математическую модель
 (4.106)
(4.106)
Для случая, когда b = 0, получим характеристику двухпозиционного реле без гистерезиса, аналогичную нелинейности типа сухого трения.
Следовательно, нелинейность типа «трехпозиционное реле» с гистерезисом является наиболее общим видом нелинейностей, имеющих характеристики с разрывом.
е) Нелинейность типа «аналого-цифровой преобразователь»(рис. 4.14, е) представляет собой многопозиционную характеристику, которую имеют, например, проволочные потенциометрические измерительные преобразователи, аналого-цифровые преобразователи и др. Эта нелинейность имеет однозначную разрывную характеристику типа ступенчатой функции:
 (4.107)
(4.107)
где  — цена одного фиксированного уровня ступени квантования; N = 0, 1, 2, 3, ...— коэффициент фиксированного уровня;
— цена одного фиксированного уровня ступени квантования; N = 0, 1, 2, 3, ...— коэффициент фиксированного уровня;  — интервал, на котором выходной сигнал сохраняет значение, равное определенному уровню. Если рассматривается квантование сигнала по уровню и дискретизация во времени, то аналогичен шагу дискретизации сигнала во времени.
— интервал, на котором выходной сигнал сохраняет значение, равное определенному уровню. Если рассматривается квантование сигнала по уровню и дискретизация во времени, то аналогичен шагу дискретизации сигнала во времени.
Следует отметить, что в данном параграфе рассмотрены лишь основные разновидности типовых нелинейностей. Кроме того, преобразователи СИ могут обладать одновременно несколькими типами нелинейностей, например насыщение с зоной нечувствительности, зазор и насыщение и т. д.
Сравнивая общие свойства характеристик нелинейных элементов СИ, можно выделить две их особенности.
Первая особенность заключается в своеобразии статических характеристик — наличии резких изломов, изгибов, разрывов непрерывностей и др. Вторая — в нарушении принципа суперпозиции. Реакция нелинейного элемента, например на единичное ступенчатое воздействие, будет зависеть от величины воздействия, а, следовательно, нелинейный элемент не будет иметь единственной передаточной функции. При этом становится невозможным использование преобразований Лапласа и Фурье при переходе из временной области в частотную и обратно.
Таким образом, математические методы исследования нелинейных СИ должны располагать арсеналом для описания элементов как в статическом, так и в динамическом режимах и учитывать эти особенности при их анализе.
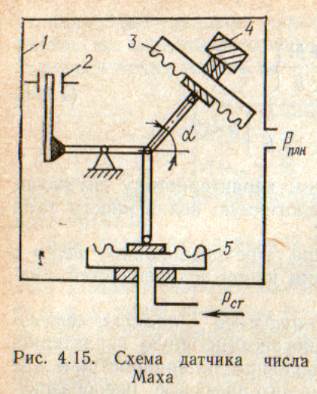
Рассмотрим для примера составление уравнений датчика числа Маха (рис. 4.15). Число́ Ма́ха (M) — в механике сплошных сред — один из критериев подобия в механике жидкости и газа. Представляет собой отношение скорости течения в данной точке газового потока к местной скорости распространения звука в движущейся среде — назван по имени австрийского учёного Эрнста Маха.
Датчик состоит из мембранной коробки 5, куда подается статическое давление рст, анероидной коробки 3, установленной на подвижной рамке 4, которая может поворачиваться вокруг оси, перпендикулярной к плоскости чертежа, па угол  , реле с контактами 2 и корпуса 1, в который подается полное давление. Если равновесие нарушается, то замыкаются контакты 2 релейного элемента и управляющее напряжение подается на исполнительный двигатель, который поворачивает nрамку 4, пока не установится равновесие. Следовательно, в данном случае имеем измерительную цепь уравновешивающего преобразования.
, реле с контактами 2 и корпуса 1, в который подается полное давление. Если равновесие нарушается, то замыкаются контакты 2 релейного элемента и управляющее напряжение подается на исполнительный двигатель, который поворачивает nрамку 4, пока не установится равновесие. Следовательно, в данном случае имеем измерительную цепь уравновешивающего преобразования.
На основании выявленных преобразований можно построить структурную схему. Условие равновесия механического узла может быть записано как
где  ;
;  ;
;  ,
,  — эффективные площади мембранной и анероидной коробок.
— эффективные площади мембранной и анероидной коробок.
Следовательно, рассматриваемая система будет существенно нелинейной ввиду наличия релейного элемента и нелинейной связи угла с возникающими усилиями. Если рассматривать колебания системы относительно некоторого конкретного угла  , то зависимость для угла от усилий может быть линеаризована. Обозначим через величину
, то зависимость для угла от усилий может быть линеаризована. Обозначим через величину  отклонение угла рамки от положения равновесия и составим уравнения лишь нелинейной части измерительной цепи с исполнительным двигателем. Нелинейность может быть описана характеристикой трехпозиционного реле с гистерезисом (рис. 4.14, д). Наличие зоны нечувствительности в релейной характеристике обусловлено зазором в контактах релейного элемента, а петли гистерезиса — сухим трением в шарнирных соединениях блока чувствительных элементов.
отклонение угла рамки от положения равновесия и составим уравнения лишь нелинейной части измерительной цепи с исполнительным двигателем. Нелинейность может быть описана характеристикой трехпозиционного реле с гистерезисом (рис. 4.14, д). Наличие зоны нечувствительности в релейной характеристике обусловлено зазором в контактах релейного элемента, а петли гистерезиса — сухим трением в шарнирных соединениях блока чувствительных элементов.
Уравнение движения исполнительного двигателя [11] имеет вид
 (4.108)
(4.108)
где  — приведенные момент инерции подвижных частей, коэффициент демпфирования и жесткость; ,
— приведенные момент инерции подвижных частей, коэффициент демпфирования и жесткость; ,  — момент, развиваемый двигателем в зависимости от управляющего напряжения U.
— момент, развиваемый двигателем в зависимости от управляющего напряжения U.
Однако напряжение, а, следовательно, и момент  являются нелинейными функциями угла и должны определяться с учетом нелинейностей типа «трехпозиционное реле» с гистерезисом. Последнее объединяет нелинейности типа сухого трения, имеющего место в подвижных соединениях, и трехпозиционного реле. Тогда на основании (4.105) и (4.108) уравнение исполнительного двигателя с учетом нелинейности будет
являются нелинейными функциями угла и должны определяться с учетом нелинейностей типа «трехпозиционное реле» с гистерезисом. Последнее объединяет нелинейности типа сухого трения, имеющего место в подвижных соединениях, и трехпозиционного реле. Тогда на основании (4.105) и (4.108) уравнение исполнительного двигателя с учетом нелинейности будет
 (4.109)
(4.109)
где b, mb — углы поворота, соответствующие замыканию и размыканию контактов реле с учетом сухого трения.
| <== предыдущая лекция | | | следующая лекция ==> |
| где Z, F, q — обобщенные сопротивление, сила, скорость. | | | Материальные ценности, созданные человеком. |
Дата добавления: 2015-11-18; просмотров: 3127;