Асинхронный преобразователь частоты
Как известно, частота тока в роторе асинхронной машины зависит от скольжения (f2 = sf1).Это свойстве асинхронных машин и. пользуется в асинхронных преобразователях частоты (АПЧ).
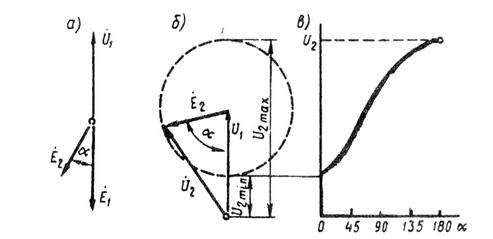
Рис. 17.2. Векторные диаграммы
индукционного регулятора напряжения
Обмотку статора АПЧ подключают к трехфазной сети с частотой f1, а ротор приводят во вращение приводным двигателем (ПД) в направлении против вращения поля статора (рис. 17.3). В этом случае в обмотке ротора наводится ЭДС Е2 частотой f2 >f1, так как скольжение s >1. Указанная ЭДС через контактные кольца и щетки создает на выходе АПЧ напряжение. Если требуется получить на выходе АПЧ напряжение частотой f2 < f1, то ротор
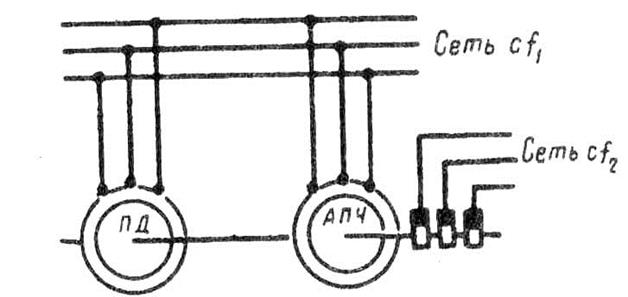
Рис. 17.3. Схема включения асинхронного
преобразователя частоты
вращают в направлении вращения поля статора с частотой вращения n2 < n1(при этом s <1).
Мощность на выходе АПЧ складывается из электромагнитной мощности Рэм,
передаваемой в обмотку ротора вращающимся полем статора, и механической мощности приводного двигателя Рпд, т. е. Р2 = Рэм + Рпд. Соотношение между мощностями Рэм и Рпдзависит oт скольжения. Так, при работе АПЧ со скольжением s = 2эти мощности равны и ротор половину мощности получает от статора, а половину — от приводного двигателя. При необходимости плавной регулировки частоты на выходе АПЧ в качестве приводного двигателя применяют электродвигатель с плавной регулировкой частоты вращения, например двигатель постоянного тока (см. гл. 29) Однако чаще всего АПЧ используют для получения определенной частоты тока f2 и в качестве приводного применяют асинхронный или синхронный (см. гл. 22) двигатель.
Дата добавления: 2015-11-18; просмотров: 1434;