Описание установки
Установка для экспериментального определения статистических и динамических характеристик микропроцессорных регулирующих устройств состоит из микропроцессорного программируемого измеритель-регулятора типа ТРМ 10 и микропроцессорного программируемого измерителя типа 2ТРМ 0, а также коммутирующей и настроечной аппаратуры (рис.17).
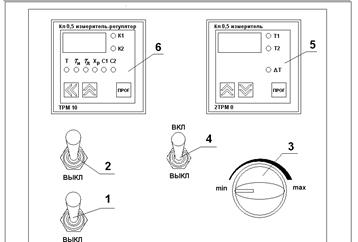
Рис.17. Внешний вид лицевой панели стенда:
1 – тумблер включения стенда; 2 – тумблер включения лабораторной работы; 3 – ручка реостата, измеряющего сопротивление термопары; 4 – переключатель возмущения;5 – 2ТРМ 0; 6 – ТРМ 10.
ТРМ 10 – предназначен для контроля и управления различными технологическими производственными процессами, где требуется высокая точность поддержания значения измеряемого параметра (рис.18).
Осуществляет следующие функции:
- измерение температуры и других физических величин (давления, влажности, расхода, уровня и т. д.) с помощью датчиков со стандартными выходными сигналами
- регулирование измеряемой величины по одному из заданных законов регулирования
- формирование дополнительного сигнала управления на выходе
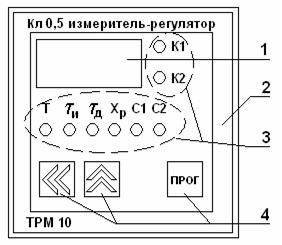
Рис. 18. Микропроцессорный программируемый измеритель-регулятор типа ТРМ 10 (1-лицевая панель; 2-цифровой индикатор; 3-кнопки управления; 4-контрольные светодиоды)
В данной работе используется модификация прибора ТРМ 10 применяемая для регулирования температуры.
Четырехразрядный цифровой индикатор предназначен для отображения значений измеряемых величин и функциональных параметров прибора.
Восемь светодиодов красного свечения сигнализируют о различных режимах работы:
-светодиоды «К1» и «К2» сигнализируют о включении выходных устройств ПИД-регулятора и компаратора
-светодиоды «Т», «tд»,«tи», «Хр»,«С1», «С2» засвечиваются в режиме программирование» и сигнализируют о том какой параметр выбран для установки;
- кнопка  предназначена для выхода в режим «Программирование»
предназначена для выхода в режим «Программирование»
- кнопка  служит для изменения значения параметра при его установке
служит для изменения значения параметра при его установке
- кнопка  служит для выбора изменяемого разряда при установке параметров.
служит для выбора изменяемого разряда при установке параметров.
2ТРМ 0 – предназначен для контроля различных технологических производственных процессов и позволяет осуществлять следующие функции:
- измерение температуры и других физических величин (давления, влажности, расхода, уровня и т. д.) с помощью стандартных датчиков
- измерение разности двух величин Ds =(s - sз)
- отображение выбранного текущего значения измеряемого параметра на встроенном цифровом индикаторе
- произвольное масштабирование диапазона измерения.
Модификация прибора используемая в данной работе служит для отображения стандартного токового сигнала (4-20 mA).
Описание установки
При включении тумблеров (1) и (2) автоматический включается измеритель-регулятор ТРМ10 и измеритель 2ТРМ0, переключатель возмущения (4) находится в положении «ВЫКЛ». На дисплее ТРМ10 отображается текущее значение температуры, измеряемой термопреобразователем сопротивления.
Заданное значение параметра регулирования (уставка), как и другие величины измерителя-регулятора задаются в меню прибора ТРМ10.
Для наблюдения законов регулирования регулятора на систему подают возмущающее воздействие λ(переключатель 4 переводят в положение «ВКЛ») которое обуславливает возникновение разности Ds между заданным sЗ и текущим s значениями регулируемого параметра. Эта разность приводит к выработке регулятором ТРМ10 регулирующего воздействия mв виде стандартного токового сигнала (4-20mA), который отображается на дисплее прибора 2ТРМ0. По результатам показаний прибора 2ТРМ0 строятся переходные характеристики соответствующего закона регулирования.
Основные параметры работы ПИД-регулятора
прибора ТРМ 10
Представляя интеграл и дифференциал в конечно-разностном виде исходное уравнение ПИД закона регулирования можно представить в виде:
 (6)
(6)
На выходе регулятора вырабатывается управляющий сигнал m, действие которого направлено на уменьшение рассогласования Ds между текущим значением регулируемой величины и заданным значением регулируемого параметра.
Формула (1) выражает закон работы ПИД-регулятора прибора ТРМ 10, где:
Хр– предел пропорциональности (обратная величина коэффициента усиления k) выражается в процентах: k = (1/Xp) 100%;
Ds – разность между заданным Туст и текущим Тi значением, то есть величина рассогласования;
Tд – постоянная времени дифференцирования;
D(Ds)– разность между соседними рассогласованиямиDsi и Dsi-1;
∆tизм≈1,5 с- время между двумя соседними измерениями ti и ti-1;
Tи – постоянная времени интегрирования;
 - накопленная сумма рассогласований.
- накопленная сумма рассогласований.
Рассмотрим подробнее выражение (6). Оно состоит из трёх составляющих:

 - пропорциональной,
- пропорциональной,  - дифференциальной,
- дифференциальной,  - интегральной.
- интегральной.
Изменяя параметры Хр, Tд, Tи можно получить частные случаи закона регулирования (1):
1. Пропорциональный закон регулирования (П-регулятор)

будет иметь место при выполнении условий равенства нулю дифференциальной и интегральной составляющих выражения (6)
Это необходимо учитывать при задании параметров регулирования.
и
2. Интегральный закон регулирования (И-регулятор)

будет иметь место при выполнении условий равенства нулю пропорциональной и дифференциальной составляющих выражения (6)
Для дифференциальной составляющей:
В чистом виде интегральный регулятор получить не удается т. к. полностью избавиться от пропорциональной составляющей невозможно, но можно снизить ее влияние, уменьшая  за счет увеличения
за счет увеличения  .
.
3. Пропорционально-интегральный регулятор (ПИ-регулятор)
Представляет собой совокупность П- и И-регуляторов с дифференциальной составляющей равной нулю
4. Пропорционально-дифференциальный регулятор (ПД-регулятор)
так как интегральная часть выражения (6) равна нулю
5. Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор) соответствует выражению (6).
Дата добавления: 2015-08-01; просмотров: 2275;