РАДИОЛОКАЦИЯ
На каждый звук есть эхо на Земле.
А.Тарковский. Степная дудка (1960)
Бди!
Сочинения Козьмы Пруткова.
Плоды раздумья (1884)
“В 1902 г. в Кельне на набережной Рейна стоял средних лет господин в сюртуке, сорочке с высоким стоячим воротником и черным галстуком. К воде он подошел столь близко, что одна из ног штатива, который он пристроил перед собой, погрузилась в прибрежную тину. На штативе покоилось какое-то непонятное сооружение цилиндрической формы. Через открытую торцевую сторону цилиндра виднелось хитросплетение проводов и какие-то блестящие детали. Когда мимо проходил пароход или баржа, раздавался звонок. Хюльсмейер – так звали человека со штативом – был весьма удовлетворен результатами своего эксперимента и немедленно запросил патент на свой “телемобилоскоп”. Так было на самом деле или нет, оставим на совести писателя Хельмута Ханке (Х.Ханке. Люди, корабли, океаны. М.: Судостроение, 1976), но первый патент по радиолокации на самом деле был выдан немецкому инженеру Х. Хюльсмейеру.
Мысль об использовании радиоволн для обнаружения объектов была впервые высказана А. С. Поповым в 1897 г. В отчете о проведении опытов “электрической сигнализации без проводников” было отмечено нарушение связи между кораблями, на одном из которых находилась передающая, а на другом приемная станции, если между ними на достаточно большом расстоянии проходил крейсер. Это был первый официально отмеченный факт обнаружения объекта с помощью радиоволн. А. С. Попов пришел к выводу, что электромагнитные волны рассеиваются и отражаются большими металлическими объектами и можно не только обнаружить объект, но и определить направление на него. А это уже радиолокация.
Радиолокация – это обнаружение объектом какого-либо другого объекта и определение его координат или траектории движения с помощью радиотехнических средств.
| Первые патенты по радиолокации [48] |
Х. Хюльсмейер получил патент на “способ обнаружения металлических предметов по отраженным ими радиоволнам” в 1905 г. Для реализации этого способа предлагалось устройство, состоящее из искрового передатчика, передающей и приемной антенн в виде цилиндрических рефлекторов, разделенных металлическим экраном, и приемника со звуковым или световым индикатором. Устройство предлагалось устанавливать на кораблях и использовать для обнаружения других кораблей. Антенны располагались на высокой мачте, чтобы увеличить расстояние прямой видимости. Излучаемые искровым передатчиком импульсы отражались от металлических частей обнаруживаемого корабля и попадали на приемную антенну. Металлический экран между передающей и приемной антеннами не позволял излучаемому импульсу сразу попасть в приемник, то есть обеспечивал, как стали говорить позже, развязку между передающей и приемной антеннами. Предложенное Хюльсмейером устройство содержало в себе основные функциональные элементы радиолокатора: передатчик, приемник и индикатор.
Однако и этот патент и последовавший за ним (1906 г.) патент Хюльсмейера на способ определения расстояния до отражающего объекта опередили свое время. Во-первых, уровень развития техники был еще очень низок, чтобы можно было реализовать столь сложное устройство, как радиолокатор, а во-вторых, и это, пожалуй, главное, нужды в радиолокации тогда не было. Поэтому предложения Хюльсмейера были успешно забыты, а радиотехника стала накапливать потенциал, необходимый для реализации идеи радиолокации.
В этом существенно помогли работы в двух областях применения радиотехники: обнаружение полезных ископаемых с помощью отраженных радиоволн и измерение высоты ионизированного слоя в атмосфере.
| Обнаружение полезных ископаемых [48] |

|
| Рис. 32 |
Идеи использования отражения радиоволн для обнаружения полезных ископаемых появились в конце 20-х годов. В первых патентах на эту тему предлагалось использовать угломерный (триангуляционный) метод измерения дальности.
Суть его поясняется на рис. 32. На самолете размещены передающая Апрд и приемная Апрм антенны, разнесенные друг от друга на расстояние b.Антенны могут согласованно поворачиваться на один и тот же угол, но в разные стороны. Допустим, антенны начали разворачиваться от некоторого начального положения α0 в сторону увеличения угла. Амплитуда принимаемого сигнала будет постепенно увеличиваться. Когда угол станет равным α1 (линиями здесь показаны оси диаграмм направленности передающей и приемной антенн), принятый сигнал будет максимальным (при условии, что отражение от поверхности земли близко к зеркальному). При дальнейшем увеличении угла α отраженный сигнал будет уменьшаться. Однако если на некоторой глубине окажется слой, проводимость которого больше проводимости почвы, то отраженный сигнал опять начнет увеличиваться и достигнет максимума при значении угла, равном α2. Глубина залегания слоя находится по правилам геометрии:
h = b(tgα2 – tgα1)/2.
Триангуляционные методы измерения дальности предлагались во многих патентах в 20-е – 30-е годы, но широкого распространения они не получили, так как для точного измерения дальности требовалось разносить передатчик и приемник на большое расстояние.
| Измерение высоты ионизированного слоя [14, 48] |

|
| Рис. 33 |
Другие методы измерения расстояния использовались при измерении высоты ионизированного слоя. Гипотеза о наличии проводящего слоя в атмосфере была высказана в 1902 г. физиками А. Коннели (США) и О. Хевисайдом (Англия) для объяснения сверхдальней связи, установленной Маркони. Экспериментальное подтверждение эта гипотеза получила двадцать с лишним лет спустя. Впервые сигнал, отраженный от верхних слоев атмосферы, обнаружили в 1924 г. английские ученые Э. Эплтон и М. Барнетт. Они использовали передатчик непрерывных колебаний с перестраивающейся длиной волны от 385 до 395 м (диапазон средних волн). Приемник располагался на расстоянии 160 кмот передатчика. При излучении передатчиком колебаний постоянной амплитуды с изменяющейся частотой принятые колебания оказывались промодулированными по амплитуде. Это могло быть, если радиоволна проходила к приемнику двумя путями (см. рис. 33): параллельно земной поверхности – поверхностная волна (короткий путь – 1) и отражаясь от ионизированного слоя атмосферы – пространственная волна (длинный путь – 2). Частоты колебаний этих радиоволн будут разными. Частота поверхностной волны f1 равна частоте передатчика, которую он генерировал за t1 с до приема, где t1 – время распространения поверхностной волны от передатчика до приемника. Частота пространственной волны f2 равна частоте передатчика, которую он генерировал за t2 с до приема, где t2 – время распространения пространственной волны от передатчика до приемника. На вход приемника приходит сумма этих колебаний: uПрм = U1sin(2πf1t) + U2sin(2πf2t). Чтобы представить, какой вид имеет этот процесс, допустим, что амплитуды колебаний одинаковы: U1 = U2 = U. Тогда
uПрм = U(sin(2πf1t) + sin(2πf2t)) = 
Видим, что суммарное высокочастотноt колебание будет иметь частоту (f1 + f2)/2 и изменяющуюся по закону косинуса амплитуду. По частоте колебаний амплитуды (f1 – f2)/2 можно определить разность времени распространения пространственной и поверхностной волн и рассчитать высоту ионизированного слоя. Так впервые появился частотный метод измерения дальности.
Более наглядное доказательство существования слоя Коннели – Хевисайда получили в 1926 г. американские ученые Дж. Брайт и М. Тьюв. Они использовали импульсный радиосигнал. Излучалась последовательность радиоимпульсов с частотой повторения около 500 Гц. Приемник располагался вдалеке от передатчика. В качестве индикатора использовалась осциллографическая трубка. На экране трубки наблюдались два импульса: первый – от поверхностной радиоволны, а второй – от пространственной волны. Разность задержек этих импульсов пропорциональна разности расстояний, пройденных пространственной и поверхностной волнами.
Таким образом, измерение высоты ионизированного слоя атмосферы вызвало к жизни два метода измерения расстояний: частотный – по разности частот двух непрерывных частотно-модулированных колебаний и импульсный – по разности задержек двух радиоимпульсов.
| Радиовысотомеры [14,48] |
В первых патентах для измерения высоты самолета, в частности для обеспечения полета на фиксированной высоте, предлагалось использовать, как уже было сказано, триангуляционный метод. Однако для измерения изменяющейся высоты этот метод был неудобен, так как постоянно требовалось поворачивать антенны. Предлагались и другие методы, и на одном из них надо остановиться особо, потому что в дальнейшем он стал единственным методом построения радиовысотомеров малых высот. Метод основан на использовании непрерывных частотно-модулированных радиоволн. Первый радиовысотомер частотного типа был предложен Ю. Бентли в 1928 г. и запатентован в 1935 г. Частота излучаемых колебаний медленно изменялась только в одну сторону, во время быстрого изменения частоты в другую сторону антенна передатчика отключалась. На приемник поступали отраженное от земли колебание и одновременно по индуктивной связи часть излучаемого колебания. В результате получались биения с разностной частотой, пропорциональной высоте полета самолета.

|
| Рис. 34 |
Немногим позже, в 1930-е гг. появился ряд патентов, в которых использовалось периодическое изменение частоты в обе стороны, как в сторону увеличения, так и в сторону уменьшения частоты. Допустим, частота излучаемого сигнала изменяется периодически по треугольному закону (рис. 34, линия 1). Отраженный от поверхности Земли сигнал задержан относительно излученного на время распространения tH= 2H/c радиосигнала до поверхности Земли и обратно. Изменение частоты отраженного сигнала показано на рис. 34 линией 2. Разность частот (частота биений) fб отраженного и излучаемого в данный момент сигналов, как видно из рис. 34, пропорциональна задержке tH и, следовательно, высоте. Кратковременные изменения частоты биений до нуля и обратно не приведут к большой ошибке, если период модуляции Тм много больше максимальной задержки tH.
| Первые шаги радиолокации [14, 24, 49] |
Итак, к середине 30-х годов уже были известны методы измерения координат. Были опробованы основные методы измерения дальности: импульсный, частотный и фазовый (разработанный в рамках радионавигации). Из известных методов радиопеленгации для радиолокации были пригодны метод максимума и равносигнальный метод. Оставались еще сомнения, можно ли обнаружить самолет на расстоянии в десятки километров, будет ли достаточным отраженный от него сигнал.
Обнадеживающие сведения были изложены в патенте Тейлора, Юнга и Хайленда, заявленном в 1933 г. В этом патенте впервые утверждалось, что самолет не отражает радиоволну, а переизлучает ее. Отражать могут только большие плоские поверхности, а небольшие объекты переизлучают, и это переизлучение резонансное. Если в конструкции самолета присутствуют прямолинейные участки, длина которых находится в определенном соотношении с длиной волны, то на этих участках возникают колебательные токи, которые вызывают электромагнитное поле. Это явление аналогично тому, как звук камертона вызывает колебания настроенной на этот звук струны. Авторами патента экспериментально было показано, что максимум переизлучения будет, когда длина переизлучающих участков приблизительно равна половине длины волны облучающего электромагнитного поля. Это означало, что и от небольших по размерам объектов мог быть заметным отраженный, пользуясь привычной терминологией, сигнал.
Была готова и техническая база. Были разработаны усилители с большим коэффициентом усиления, появились электронно-лучевые трубки, обеспечившие удобную индикацию, осваивался УКВ диапазон, что позволяло делать антенны с узкой диаграммой направленности.
Итак, для появления радиолокации нужен был только стимул, внешний толчок. И такой стимул появился к середине 30-х годов. Мир интенсивно милитаризировался, бурно развивалась военная авиация. Нужны были средства надежного обнаружения самолетов как одного из носителей самых грозных видов оружия. Имевшиеся в то время оптические, звуковые и тепловые средства обнаружения самолетов не удовлетворяли военных. Работа оптических обнаружителей зависела от метеоусловий. Звуковые обладали малой дальностью действия (меньше 25 км) и большими динамическими ошибками из-за малой скорости распространения звука. Теплолокаторы позволяли обнаруживать самолет по его тепловому излучению на дальности не более 10 – 12 км, да и то только ночью на фоне безоблачного неба.
Развитие радиолокации началось независимо и почти одновременно в США, Англии, Франции, Германии и СССР. Для начального периода радиолокации было характерно использование непрерывного радиоизлучения и обнаружение объектов по интерференции радиоволн. И это легко объяснимо. С непрерывным излучением уже работали в радиосвязи, и можно было использовать имеющуюся аппаратуру.
Во Франции исследования по обнаружению препятствий с помощью радиоволн начались в 1934 г. И уже в 1935 г. на океанском лайнере “Нормандия” был установлен радиолокатор, способный обнаруживать объекты, находящиеся по курсу корабля, например айсберги. В Италии весной 1935 г. Г. Маркони продемонстрировал обнаружение автомашин и людей доплеровским радиолокатором с непрерывным излучением.
Одни страны (США, Англия, Германия) прошли через этап непрерывной радиолокации очень быстро, у других (Франция, СССР) он затянулся. Не сразу были осознаны недостатки непрерывной радиолокации. Непрерывные радиолокационные системы плохо работали при наличии многих целей. Интерференционная картина получалась такой сложной, что разделить сигналы от разных целей не представлялось возможным. Импульсная радиолокация позволяла легко разделить сигналы от многих целей. Если излучать короткий радиоимпульс, то сигнал, отраженный от нескольких находящихся на разных дальностях и одном направлении целей, представлял собой последовательность радиоимпульсов, каждый из которых соответствовал отдельной цели.
Ход работ по радиолокации перед второй мировой войной иллюстрируется таблицей 1.
Работы по радиолокации в 1930-е годы Таблица 1
| Годы | Страны | |||
| США | Англия | Германия | СССР | |
| Эксперименты по радиообнаружению самолетов Первые работы по импульсному методу радиолокации (Тейлор, Янг, Пейдж) Разработка импульсной РЛС в Морской исследовательской лаборатории Корабельная РЛС XAF с дальностью действия 80 км Опытный образец SCR-268 Производство РЛС SCR-268 | Создание комитета по научному обеспечению ПВО Первые работы по непрерывной и импульсной радиолокации (Р.Уотсон-Уатт) РЛС СН (Chain Home) Система радиолокационной защиты из 20 РЛС СН Станция орудийной наводки GL-MK-1 Самолетная РЛС СВЧ диапазона AI (Aircraft Interception) | Создание фирмы “Гема” для разработки корабельных РЛС Демонстрация импульсной корабельной РЛС Начало работы над РЛС фирмы “Телефункен” РЛС дальнего обнаружения “Фрейя” РЛС орудийной наводки “Вюрцбург” | Опыты по радиообнаружению самолетов (ЦРЛ, Коровин Ю.К.) Разработка непрерывной системы обнаружения самолетов (ЛЭФИ, Шембель Б.К.) Разработка импульсной РЛС (ЛФТИ, Кобзарев Ю.Б.) Непрерывная радиолокационная система “Ревень” (НИИИСКА, Стогов Д.С.) Принята на вооружение РУС-1 Опытные образцы РЛС “Редут” (будущая РУС-2) |
| Радиолокация в СССР в 30-е – 40-е годы [14, 27, 50, 51, 52, 53, 54] |
В СССР работы по радиообнаружению самолетов официально начались в конце 1933 г. – начале 1934 г. по инициативе двух управлений наркомата обороны: Главного артиллерийского управления (ГАУ, М. М. Лобанов) и Управления противовоздушной обороны (УПВО, П. К. Ощепков).
Развертыванию работ предшествовали экспериментальные исследования, выполненные в 1933 г. в Центральной радиолаборатории (ЦРЛ) под руководством инженера Ю. К. Коровина. Разработанная аппаратура позволяла обнаруживать самолет на дальностях до 8 – 10 км.
ГАУ своей целью ставило усовершенствовать систему “Прожзвук”, использовав в ней для наведения прожекторов радиопеленгатор вместо акустического пеленгатора. Идея модернизировать систему “Прожзвук”, а не заменить ее радиотехнической системой орудийной наводки была ошибочной. Несмотря на весьма широкий фронт развернутых работ, затрату огромных сил и средств, создать работоспособную систему орудийной наводки к началу Великой Отечественной войны не удалось.
По заказу ГАУ в 1934 г. были начаты работы в Ленинградском электрофизическом институте (ЛЭФИ) под руководством инженера Б. К. Шембеля. В радиолокаторе использовалось непрерывное излучение, так как это позволяло воспользоваться аппаратурой, уже разработанной для радиосвязи, и сократить время разработки. Был изготовлен подвижный двухантенный зенитный радиолокатор “Буря”. Испытания радиолокатора показали, что дальность обнаружения самолета составляла 10 – 11 км, а точность пеленгования 3 – 4о. В усовершенствованном варианте РЛС (1937 г.) дальность обнаружения была повышена до 30 – 35 км, а точность определения угловых координат – до 0,6о. На этом работы по договору с ГАУ закончились.
Одновременно с разработкой радиолокатора для зенитной артиллерии шла разработка радиолокатора дальнего обнаружения для службы воздушного наблюдения, оповещения и связи (ВНОС) ПВО. Инициатором работ был П. К. Ощепков, руководить работами было поручено также Б. К. Шембелю. К 1 июля 1934 г. был разработан радиолокатор непрерывного излучения “Рапид” с разнесенными приемником и передатчиком. Приемник размещался на расстоянии 11 – 50 км от передатчика. Испытания подтвердили возможность обнаружения самолета по интерференции прямой и отраженной волн на входе приемника.
Дальнейшая разработка идей, заложенных в аппаратуру “Рапид”, привела к созданию в Научно-испытательном исследовательском институте связи Красной Армии (НИИИС КА) системы “Ревень” (руководитель работ инж. Д. С. Стогов). В сентябре 1939 г. система “Ревень” под названием РУС-1 (радиоулавливатель самолетов) была принята на вооружение войск ПВО. Предполагалось сделать заградительную линию из этих станций. До июня 1941 г. было выпущено 45 комплектов этой системы. Однако система РУС-1 не оправдала возлагавшихся на нее ожиданий и в начале Великой Отечественной войны все комплекты были отправлены на Кавказ и на Дальний Восток.
Параллельно велись работы и по радиолокационным системам с импульсным излучением, в основном благодаря усилиям П. К. Ощеп-кова.
Павел Кондратьевич Ощепков (24.06.1908 – 1.12.1992)
П. К. Ощепков родился в деревне Зуевы Ключи Каракулинского района Удмуртии. Оставшись в 10-летнем возрасте без родителей, стал беспризорником. Научился читать в 12-летнем возрасте в школе-коммуне. В 1928 г. поступил в институт народного хозяйства им. Г.В.Плеханова на электротехнический факультет и в 1931 г. досрочно с отличием окончил Московский энергетический институт, куда вошел указанный факультет. В 1932 г. П. К. Ощепкова призвали в ряды Красной Армии, но вскоре перевели в Центральный аппарат Наркомата обороны как грамотного специалиста.
Ощепков был убежден в перспективности использования радиоволн для обнаружения самолетов и убедил заместителя наркома обороны М. И. Тухачевского в необходимости научно-исследовательских работ по этой тематике. В качестве представителя Управления ПВО П. К. Ощепков обратился к президенту Академии наук СССР А. П. Карпинскому, а через него к академику А. Ф. Иоффе, директору ЛФТИ. Абрам Федорович Иоффе созвал 16 января 1934 г. компетентное совещание, которое в итоге высказалось в пользу целесообразности подобных исследований. С этого времени П. К. Ощепков определял основную политику в разработке радиолокационных систем и не только занимался организационными вопросами, но и участвовал непосредственно в разработке узлов РЛС. Но в 1937 г. был арестован и до 1947 г. (с небольшим перерывом в 1939 – 1941 гг.) находился в заключении.
В начале 50-х годов прошлого века П. К. Ощепков возвратился к активной научно-технической деятельности. Оставив радиолокацию, он занялся вопросами видения внутри непрозрачных сред – интроскопии, как потом назвали это научно-техническое направление. По его инициативе в 1964 г. был образован Институт интроскопии, первым директором которого он стал. В 1975 г. на базе института было образовано МНПО «Спектр», а в дальнейшем создана ассоциация «Спектр-Групп». В октябре 1967 г. П. К. Ощепков создает ЭНИИ – Общественный институт по проблеме энергетической инверсии, занимающийся изучением перехода одного вида энергии в другие. Главная идея П. К. Ощепкова в решении проблемы непосредственного использования тепловой энергии окружающей среды состояла в создании несимметричных для электронов потенциальных барьеров в сверхтонких металлических и полупроводниковых системах, способных под воздействием окружающей среды выработать организованную электродвижущую силу, которую можно будет использовать во внешних цепях.
П. К. Ощепкова не стало 1 декабря 1992 года. На его надгробии высечены слова: «Отцу радиолокации, интроскопии, энергоинверсии».
Первое предложение П. К. Ощепкова о применении импульсного метода относится к концу 1934 г. А в марте 1935 г. в ЛФТИ в лаборатории профессора Д. А. Рожанского были развернуты научные исследования по импульсной радиолокации в соответствии с договором, подписанным с УПВО РККА. Приемное устройство разрабатывалось в ЛФТИ, а импульсный передатчик взялся разрабатывать заказчик – УПВО, в котором было создано научно-техническое подразделение, руководимое П. К. Ощепковым. В 1936 г. Д. А. Рожанский скоропостижно скончался и лабораторию возглавил Ю. Б. Кобзарев.
Юрий Борисович Кобзарев (8.12.1905 – 26.04.1992)
Кобзарев Ю. Б. родился в Воронеже. Его отец был военным, окончил кадетский корпус. Мать происходила из обедневшей дворянской семьи. В 14 лет остался без отца. Освоив программу двух последних классов школы за один год, он в 1922 г. поступил в Харьковский университет (переименованный в то время в Харьковский институт народного образования ХИНО).В ХИНО он увлекся радиотехникой, и когда в 1925 г. в Харьков приехал профессор Рожанский Д. А., чтобы создать пункт для изучения распространения коротких волн, Кобзарев стал помогать ему. Накануне отъезда из Харькова Рожанский предложил ему переехать в Ленинград для работы в лаборатории. А так как Кобзареву предстояло еще год учиться в институте, Рожанский посоветовал ему сдать выпускные экзамены досрочно, что и было сделано.
С 1 февраля 1926 г. Ю. Б. Кобзарев зачислен на работу в отдел коротких волн Ленинградской физико-технической лаборатории ВСНХ (ЛФТЛ).
Первые научные работы Ю. Б. Кобзарева были связаны с проблемой стабилизации частоты ламповых генераторов. Летом 1935 г. в составе Ленинградского физико-технического института была организована лаборатория для проведения работ по радиолокации. Лабораторию возглавил Д. А. Рожанский, который предложил Ю. Б. Кобзареву перейти на работу по этой новой тематике. После скоропостижной смерти Д. А. Рожанского в 1936 г. Кобзарев был назначен руководителем лаборатории и с честью завершил разработку РЛС. В 1941 г., перед самой войной, небольшому коллективу лаборатории ЛФТИ в составе Ю. Б. Кобзарева, П. А. Погорелко, Н. Я. Чернецова была присуждена Сталинская премия “За изобретение прибора для обнаружения самолетов”.
В СССР ощущалась нехватка специалистов по радиолокации, и летом 1943 г. Ю. Б. Кобзареву было поручено организовать в Московском энергетическом институте на радиотехническом факультете кафедру радиолокации. В период организации кафедры Ю. Б. Кобзарев не имел ученых степеней и званий, хотя уже был широко известен специалистам своими научными работами в области радиотехники и радиофизики. Степень доктора технических наук и звание профессора были присуждены ему Высшей аттестационной комиссией без защиты диссертации в 1949 г. по представлению ученого совета МЭИ.
После окончания войны Ю. Б. Кобзарев продолжил работу по радиолокационным системам в качестве руководителя лаборатории в НИИ-20. К 1954 г. в его лаборатории. была разработана первая в СССР когерентная РЛС дальнего обнаружения с защитой от пассивных помех (РЛС “Тропа”). В октябре 1953 г. Ю. Б. Кобзарев был избран членом-корреспондентом АН СССР по отделению технических наук. В 1955 г. он начал работать по совместительству во вновь организованном Институте радиотехники и электроники АН СССР. В лаборатории, руководимой Кобзаревым, были начаты исследования состояния атмосферы, водной и земной поверхностей по их излучению в СВЧ диапазоне. Эта область получила название “дистанционного зондирования”.
В феврале 1970 г. его избрали действительным членом АН СССР. В 80-е годы Юрий Борисович со свойственной ему тягой ко всему новому заинтересовался некоторыми необычными явлениями человеческой психики. Он стал председателем межведомственной комиссии, которая подтвердила реальное существование ряда аномальных явлений, их связь с реальными физическими полями. Вскоре в ИРЭ АН СССР по инициативе и под руководством академика Ю.В.Гуляева была создана лаборатория для исследования физических полей и излучений, создаваемых живыми организмами. Сегодня результаты деятельности этой лаборатории (центра “Электронные диагностические системы - ЭЛДИС”) позволяют надеяться на разработку принципиально новых неинвазивных методов ранней медицинской диагностики.
Заслуги Ю. Б. Кобзарева были высоко оценены государством. В 1975 г. академику Ю.Б.Кобзареву было присвоено звание Героя Социалистического Труда, он был награжден четырьмя орденами Ленина и медалями.
Кобзарев Ю. Б. скончался в Москве 26 апреля 1992 г.
В апреле 1937 г. начались испытания первого макета импульсного радиолокатора. Чтобы устранить мешающее воздействие передатчика на приемник, их разнесли на расстояние около 1 км. Первые же полеты самолетов дали положительные результаты. Небольшой самолет типа Р-5 обнаруживался на расстоянии до 17 км. День испытания 17 апреля 1937 г. можно считать днем рождения импульсной радиолокации в СССР.
До промышленного образца импульсного радиолокатора оставался один шаг – надо было сделать более мощный передатчик. Но произошло непредвиденное. Летом 1937 г. П. К. Ощепков был арестован, функции заказчика работы были переданы Научно-испытательному исследовательскому институту Красной Армии (НИИИС КА), финансирование работ – прекращено. И только благодаря директору ЛФТИ академику А. Ф. Иоффе работы продолжались. Он, понимая государственную важность этих работ, нашел возможность финансировать их в 1938 г. из средств института. Если бы не участие А. Ф. Иоффе, радиолокационные станции обнаружения самолетов не были бы созданы к началу войны.
В августе 1938 г. были проведены испытания доработанной РЛС. Они показали надежное обнаружение самолетов (бомбардировщиков типа СБ) на дальностях до 55 км. Результаты испытаний устранили все сомнения и позволили поставить вопрос о создании промышленных образцов импульсных радиолокаторов. Однако заказчик – НИИИС КА не спешил с передачей разработки ЛФТИ в промышленность. Выдвигались разные причины, но,по-видимому, причиной задержки было то, что в это время в НИИИС КА завершалось создание другой станции для радиообнаружения самолетов с использованием непрерывного излучения (система “Ревень” – разработчик Д. С. Стогов), являвшейся собственной разработкой института, на основе которой была создана РУС-1.
В конце концов Постановлением Комитета обороны при СНХ в апреле 1939 г. было поручено Московскому научно-исследовательскому институту промышленности (НИИ-20) совместно с ЛФТИ изготовить в 1940 г. два опытных образца радиолокаторов. По существу, было упущено два года с момента проведения решающих экспериментов по созданию установки. Промышленное освоение РЛС пошло быстрыми темпами, испытания образцов дали превосходные результаты. Приказом наркома обороны от 26 июня 1940 г. станция была принята на вооружение войск ПВО под названием РУС-2 (рис. 35).

|
| Рис 35 |
И хотя к началу Великой Отечественной войны было налажено промышленное производство радиолокаторов РУС-2 в двух вариантах – автомобильном (РЛС “Редут”) и перевозимом в упаковках (РЛС “Пегматит”), радиолокаторов у нас практически не было. К тому же производство РЛС было сосредоточено в Ленинграде, который стал фронтовым городом, что заставило эвакуировать все производство на восток.
Осенью 1941 г., когда фронт вплотную подошел к Москве, в окрестностях столицы находились только две радиолокационные станции: РЛС обнаружения РУС-2 под Можайском и английская РЛС орудийной наводки GL-MK II в районе села Зюзино. Эти РЛС эффективно применялась в битве под Москвой. Так, на этом участке в одном из налетов по целеуказанию РЛС было уничтожено около 100 из 127 немецких бомбардировщиков. Похоже, этот пример убедил советских руководителей в полезности радиолокационного вооружения. В феврале 1942 г. был образован завод № 465 с участием специалистов из НИИ-9 с целью изготовления аналога станции орудийной наводки GL-MK II. К ноябрю 1942 г. разработку завершили.
Но информация, приходившая из США и Великобритании, а также образцы зарубежных РЛС, поступавшие в войска, показывали, что отечественная радиотехническая промышленность значительно отстает от зарубежной. К этому времени не существовало отечественных РЛС для управления зенитными орудиями и самолетных радиолокаторов. Практически не были освоены диапазоны дециметровых и сантиметровых волн. Требовались большие усилия и большая организационная работа, чтобы поправить положение. Эту работу решили доверить А. И. Бергу, выдающемуся организатору, ученому, инженеру.
Аксель Иванович Берг (10.11.1893 – 9.07.1979)
Берг А. И. родился в городе Оренбурге. Его отец – генерал Иоганн Александрович Берг, швед, мать - итальянка. Отец умер, когда мальчику было шесть лет, и семья из Оренбурга переехала в Петербург. В обычной школе учеба не заладилась, и Акселя определили в Александровский кадетский корпус. Но мальчика тянуло в море, и его перевели в Морской корпус, который он окончил в 1914 г., проявив “блестящие способности в науках и военном деле”. Затем последовали годы морской службы, сначала штурманом, а после Октябрьской революции – командиром подводных лодок. Но любовь к морю не подавила его стремления к образованию. За время службы он сдал экзамены за четыре курса Петербургского политехнического института. После полученной в 1922 г. травмы и увольнения из флота А. И. Берг отдался учебе. Менее чем за два с половиной года, с декабря 1922 г. по март 1925 г., он прошел полный курс обучения и с отличием окончил инженерный факультет Военно-морской академии. Во время обучения в академии он с отличием окончил Военно-морское инженерное училище и получил диплом инженера-электрика флота (это было условием приема его в академию), преподавал на курсах повышения квалификации радистов при академии, читал лекции по дисциплинам “Электровакуумные приборы” и “Общий курс радиотехники” на электротехническом факультете Военно-инженерной академии.
После окончания академии стал работать преподавателем в Военно-морском инженерном училище, отказавшись от предложенной ему адъюнктуры. Одновременно занимался научной и организационной работой. Его научное направление в те годы – исследование и расчет ламповых генераторов (до сих пор при расчете генераторов используются коэффициенты Берга). По его инициативе в 1932 г. был образован Научно-исследовательский морской институт связи (НИМИС). С момента образования и до декабря 1937 г. А. И. Берг был его начальником. В 1937 г. был арестован и в 1940 г. освобожден за недостаточностью улик. Он отказался занять прежний пост начальника НИМИСа и стал преподавать в Военно-морской академии и ЛЭТИ. В декабре 1941 г. был эвакуирован вместе с академией в Самарканд.
В 1943 г. его вызвали в Москву и назначили заместителем министра электропромышленности. Вскоре был создан Совет по радиолокации, всей работой которого фактически руководил А. И. Берг. При его активном участии создавались заводы и НИИ по радиолокационной тематике. Его главным детищем, образованным в мае 1943 г., стал ЦНИИ-108, деятельность которого охватывала все аспекты радиолокации. Берг был озабочен также состоянием подготовки кадров для радиолокации. По его инициативе была образована кафедра радиолокации в Московском авиационном институте.
Занимаясь с начала войны делами, далекими от моря, он всю жизнь оставался морским офицером, с гордостью носил морской белый китель. В 1953 г. адмирал А. И. Берг был назначен на пост заместителя министра обороны по радиоэлектронике. Трудно перечислить все дела, у истоков которых он стоял. Образовал Бюро новой техники (БНТ), ведавшее информационным обеспечением. Организовал и возглавил Институт радиотехники и электроники АН СССР. По его предложению в 1959 г. создан Научный совет по комплексной проблеме “Кибернетика” при Президиуме АН СССР. Этот совет А. И. Берг бессменно возглавлял до своей кончины. В 1964 г. Аксель Иванович организовал Центральный научно-исследовательский институт Министерства обороны, основное направление работ которого – надежность, исследования и испытания в области электроники и контрольно-измерительных средств. После 1964 г. был инициатором внедрения в педагогику программированного обучения.
Многогранная деятельность А. И. Берга была отмечена многими наградами: академической Золотой медалью им. А. С. Попова за выдающиеся работы в области радиотехники (1951), званием Героя Социалистического Труда (1963), многочисленными орденами и медалями.
Аксель Иванович умер в ночь с 8 на 9 июля 1979 г. в больнице на улице Грановского – остановилось сердце.
В июле 1943 г. был образован Совет по радиолокации при Государственном комитете обороны под председательством Г. М. Маленкова. Берг А. И. стал заместителем, Кобзарев Ю. Б. – членом комитета. Одновременно А. И. Берг был заместителем наркома электропромышленности. Это позволило ему возглавить всю дальнейшую работу по радиолокации.Совет по радиолокации сыграл огромную роль не только в развертывании работ по радиолокации в СССР и в оснащении армии современной радиолокационной техникой, но и в создании новых научно-исследовательских институтов и конструкторских бюро, базовых отраслей радиоэлектронной промышленности, что на много лет вперед обеспечило успехи отечественной радиоэлектроники.
За время ВОВ были выпущены следующие РЛС обнаружения:
двухантенный вариант РУС-2 – 12 шт.,
одноантенный вариант РУС-2 – 132 шт.,
разборный одноантенный вариант РУС-2с – 463 шт.,
РЛС П-2м – 100 шт.
После окончания войны продолжались работы по дальнейшему усовершенствованию РЛС дальнего обнаружения метрового диапазона. В НИИ-20 были разработаны станции П-3, П-8, П-10. В дальнейшем эти разработки были переданы в г. Горький (теперь Нижний Новгород), где были выпущены последующие модификации этих РЛС – П-12 и П-14. Эти РЛС многие годы оставались основой системы ПВО страны. Позднее станции метрового диапазона стали вытесняться станциями более коротковолновых диапазонов. Однако, как оказалось, рано ставить точку на РЛС метрового диапазона. Появившиеся в 80-е годы самолеты-невидимки, выполненные по технологии “Стелс”, прекрасно обнаруживались радиолокаторами метрового диапазона.
| Радиолокация в США в 30-е – 40-е годы [24, 49] |
В США работа по созданию устройства “обнаружения вражеских судов и самолетов с помощью радио” началась в 1931 г. в исследовательской лаборатории ВМС в Вашингтоне. В разработанной системе использовалось непрерывное излучение, а обнаружение цели производилось по интерференции прямого и отраженного сигналов. Приемник располагался на большом расстоянии от передатчика, дальность обнаружения достигала 65 км. Но поскольку такая система не могла использоваться на судах ВМС, все результаты были переданы министерству армии.
Работа в лаборатории ВМС по радиообнаружению продолжилась в 1934 г., но уже с использованием импульсного излучения. В декабре этого года. А. Х. Тейлор, Л. Ч. Янг и Р. Пейдж продемонстрировали работоспособность разработанного устройства.
Работа над импульсными РЛС шла параллельно в ведомствах ВМФ и армии. Радиолокационная система для ВМС была подготовлена к натурным испытаниям в апреле 1936 г. Испытания прошли успешно, и была поставлена задача уменьшить размеры оборудования настолько, чтобы его можно было использовать на военных судах. Для этого необходимо было в первую очередь уменьшить размеры антенн, что можно сделать только переходом на более высокие частоты. Задача была решена, и в июле 1936 г. была передана в эксплуатацию небольшая РЛС, работавшая на частоте 200 МГц (длина волны 1,5 м). В том же месяце успешно закончились испытания первого радиолокационного антенного переключателя также для частоты 200 МГц. Это позволило передатчику и приемнику работать с общей антенной.
Первые испытания РЛС на море были проведены в США в апреле 1937 г. А в 1940 г. началось производство судовой РЛС типа CXAM. К декабрю 1941 г. (т.е. к моменту нападения на Пирл-Харбор) на кораблях ВМС США было установлено 79 РЛС разных типов.
|
| Рис.36 |
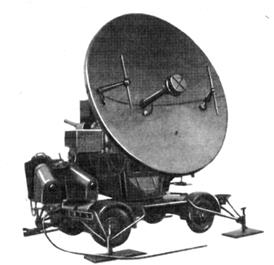
В армии США работа над импульсными РЛС началась весной 1936 г., а первые полевые испытания были проведены в декабре 1936 г. Осенью 1938 г. были проведены эксплуатационные испытания РЛС обнаружения типа SCR-268 (рис. 36), которая широко использовалась во время второй мировой войны. В РЛС использовались отдельные антенны: одна для передачи (6) и две для приема: азимутальная (1) и угломестная (7). Вблизи антенн располагались передатчик (4) с блоком питания (3) и приемники: высоты (8) и азимута (12). Внизу размещались генератор импульсов (11) и модулятор(10) Не предусматривалось никакой кабины, три оператора наблюдали за индикаторами дальности (2), высоты (5) и азимута (9).
Не осталась без внимания и авиация. В начале войны была разработана самолетная РЛС типа ASB – первая в мире бортовая РЛС, предназначенная для обнаружения судов и прицельного бомбометания. Всего было произведено за период с 1942 по 1944 гг. более 26 тыс. этих РЛС – больше, чем РЛС любого другого типа.
27 июня 1940 г. в США был образован Национальный исследовательский комитет по вопросам обороны с целью “координации и поддержки научных исследований по механизмам и устройствам военного назначения”. В него вошли видные ученые и по одному представителю от армии и ВМС. Хотя в стране уже шла достаточно интенсивная работа по радиолокации, но область СВЧ радиолокации была совершенно не изучена. Ответственность за разработку РЛС в неисследованной области СВЧ спектра была возложена на только что организованную по инициативе комитета Радиационную лабораторию в Массачусетском технологическом институте (Кембридж, шт. Массачусетс). Создание Радиационной лаборатории МТИ было одним из крупнейших достижений комитета.
Одна пятая часть всех физиков страны, примерно несколько сотен человек, работали над созданием радиолокаторов в Радиационной лаборатории МТИ. Во время войны в лаборатории было разработано около 150 различных образцов радиолокационной техники. Работы проводились также в Радиационной лаборатории Колумбийского университета и в Гарвардской радиолокационной лаборатории. В конце войны на промышленных предприятиях США ежемесячно производилось 2000 радиолокаторов. На разработки и производство РЛС к концу войны было израсходовано средств больше, чем на создание атомной бомбы, а именно 2,5 млрд долл. против 2 млрд долл.
| Радиолокация в европейских странах в 30-е – 40-е годы [24, 27, 49] |
В Европе лидерами в области радиолокации были Англия и Германия, но работы проводились также в Италии и Франции.
Во Франции был разработан первый радиолокатор для гражданского применения. Если в других странах (кроме Италии) радиолокация начиналась с обнаружения самолетов, то во Франции – с обнаружения препятствий для морских судов. В 1934 г. были начаты исследования по обнаружению препятствий с помощью радиоволн. И уже в 1935 г. на океанском лайнере “Нормандия” был установлен детектор препятствий, способный обнаруживать объекты, находящиеся по курсу корабля, например айсберги.
Вторая французская разработка – двухпозиционная РЛС с непрерывным излучением (подобная российской РУС-1). Ее автор инженер Радиоэлектротехнической лаборатории П. Давид вынашивал идею “барьерного заслона” с 1928 г. С помощью нескольких таких заградительных РЛС предполагалось не только обнаруживать самолеты, но и определять их курс и скорость.
В связи с оккупацией Франции дальнейшие работы по радиолокации в ней прекратились.
В Англии отражение радиоволн от самолета наблюдали в начале 1930-х годов, а возможность использования этого явления для обнаружения самолетов обсуждалась в 1934 г. В феврале 1935 г. руководитель радиоотдела Национальной физической лаборатории Роберт Э. Уотсон Уатт представил докладную записку, в которой говорилось, каким образом с помощью радиоволн можно обнаруживать самолеты. В июне 1935 г. он продемонстрировал двухпозиционную РЛС с непрерывным излучением. В сентябре 1935 г. осуществил пеленгацию самолета с помощью импульсной РЛС, работавшей на частоте 30 МГц. Технические характеристики первой же модели оказались настолько хорошими, что министерство авиации немедленно приступило к строительству РЛС, названных CH (Chain Home). В 1937 году на восточном побережье Англии уже было установлено 20 таких станций. В 1938 году все они приступили к круглосуточному дежурству, продолжавшемуся до конца войны.
В радиолокационных станциях СН использовались отдельные антенны для передачи и приема. Они размещались на мачтах высотой более 100 м. Эти РЛС позволяли обнаруживать самолеты противника на максимальных расстояниях около 200 км, определять их азимут, а также грубо определять угол места (высоту полета), однако они не позволяли обнаруживать низколетящие самолеты. Развитие радиолокации в Англии накануне войны шло быстрыми темпами, и уже к 1939 г. были разработаны РЛС следующего поколения – CHL, лишенные этого недостатка, а также станции орудийной наводки и самолетные радиолокаторы.
Радиолокация для Англии сыграла решающую роль в войне с Германией. Наземные радиолокационные системы обеспечивали своевременное обнаружение немецких самолетов и целеуказание своим истребителям, а бортовые РЛС, которые были установлены на всех истребителях ВВС Великобритании, обеспечивали перехват и точное наведение.
В июле 1940 г. немцы начали массированную воздушную войну против Великобритании. У них было 2500 бомбардировщиков и истребителей, а ВВС Великобритании могли выставить против них только 900 истребителей. Благодаря радиолокационному обеспечению английской авиации немцы несли сокрушительные потери. Так, в один из дней сентября 1940 г. при налете на Лондон немцы потеряли 185 самолетов. К концу октября 1940 г. “Люфтваффе” вынуждены были отступить, проиграв воздушную битву за Британию.
В Германии, так же как во Франции и СССР, эксперименты начали проводиться в дециметровом диапазоне (на волне 13,5 см) еще в 1934 г., но были прекращены из-за малой мощности имевшихся тогда передатчиков. Работы, приведшие к созданию широко применявшихся немецких РЛС дальнего обнаружения Freya, начались в 1936 г. И в 1938 г. первые РЛС этого типа были приняты на вооружение. Дальность обнаружения самолета составляла 125 – 240 км. Ширина диаграммы направленности антенны – 20о. В 1936 г. была разработана корабельная РЛС управления огнем Seetakt. К концу 1938 г. в Германии был также освоен выпуск РЛС орудийной наводки Wurzburg (рис. 37). Таким образом, к началу второй мировой войны Германия обладала радиолокационными станциями различных типов и весьма высокого качества.
|
| Рис. 37 |
Но в начале 40-х годов Великобритания и США ускорили свои работы в области радиолокации, а Германия этого не сделала. Германское верховное командование считало, что война будет выиграна быстро и поэтому вполне достаточно существующих РЛС. Было решено прекратить все исследования, которые не могли дать готовые образцы аппаратуры менее чем за год, а самих исследователей призвали в армию. Эта политика сохранялась до начала 1943 г. Когда немцы поняли, что отстали, наверстать упущенное уже было нельзя.
| Радиолокация в 50 – 60-х годах [24, 28, 30, 49] |
В военной радиолокации в период от конца войны примерно до середины 1950-х годов наблюдалось некоторое затишье, не было начато особо крупных работ. Так, вплоть до 1955 г. военными силами западных стран использовались различные модификации РЛС дальнего обнаружения типа SCR-584. Во время корейской войны с обеих сторон использовалась радиолокационная техника, разработанная во время второй мировой войны.
Сразу после второй мировой войны начался период осмысления того, что было сделано в радиолокации. Во время войны было не до теории, главным было – разрабатывать и производить. Накопился громадный опыт в области схемотехники, особенно импульсной; СВЧ техники и СВЧ электроники; генерирования и обработки сигналов и т.д. Этот опыт был обобщен в серии книг, изданных Массачусетским технологическим институтом. Эти книги были переведены на русский язык и вышли из печати в СССР в начале 50-г годов, во многом благодаря усилиям А.И.Берга. На рубеже 50-х – 60-х годов сформировалась статистическая теория радиолокации, в которой прием сигналов и выработка решений рассматривались как статистические задачи. Родоначальником статистической теории радиолокации по праву считают работника “Bell System Laboratories” Стефана Райса, который одним из первых получил основополагающие результаты, опубликованные в 1944 и 1945 гг. в двух его статьях в журнале “Bell System Journal”.
Однако в, казалось бы, спокойной обстановке уже начиналось мощное движение. В 50-е годы военные получили дальние бомбардировщики, ракеты и ядерное оружие, дававшие возможность одной стране стереть с лица земли другую в результате одного неожиданного удара. Перед разработчиками военных радиолокационных систем встали две задачи: первая – обеспечить дальнее обнаружение самолетов и ракет и измерение параметров их траектории за время, достаточное для принятия ответных действий, и вторая – обеспечить одновременное слежение за многими высокоскоростными целями.
Развитие РЛС дальнего обнаружения в США происходило постепенно. Сначала появилась полуавтоматическая наземная система “Сейдж”, которая предназначалась для управления средствами защиты США от ударов с воздуха. Наземные РЛС, установленные на севере США и в южной части Канады, обеспечивали почти полное перекрытие воздушного пространства с севера, за исключением сектора малых высот.
Позднее в средней части Канады были установлены дополнительные РЛС, обладавшие еще большей дальностью действия. Эта система раннего обнаружения (система DEW), стоившая 1 млрд долларов, была в состоянии обнаруживать и сопровождать скоростные самолеты, но не ракеты. Поэтому ей на смену пришла система раннего обнаружения баллистических ракет BMEWS.
Первая станция системы BMEWS, построенная в Гренландии в 1959 г., имела четыре антенные решетки, каждая высотой 49,5 м. Передатчики генерировали импульсы мощностью более 2 МВт и создавали два веерообразных луча, расположенных один над другим. РЛС могла обнаружить ракету на расстоянии 4800 км, когда она поднималась на высоту 960 м. Данные, полученных РЛС за то время, что ракета проходила зону действия нижнего, а затем верхнего веерных лучей, позволяли компьютерам рассчитать курс ракеты и выдать предупреждение примерно за 20 минут до ее подхода к цели.
В СССР разработка РЛС дальнего обнаружения началась с 1954 года в Радиотехнической лаборатории АН СССР (РАЛАН), возглавляемой А. Л. Минцем, на основании специального решения Правительства. В 1957 году, теперь уже в Радиотехническом институте (РТИ) АН СССР, выросшем из РАЛАН, приступили к созданию принципиально новой мощной РЛС – Центральной станции обнаружения баллистических объектов (сокращено ЦСО-П) метрового диапазона волн. А уже в сентябре 1961 года такая РЛС, построенная в районе Сары-Шаган на озере Балхаш, успешно провела автоматическое обнаружение и сопровождение баллистической ракеты, запущенной с полигона Капустин Яр. Станция ЦСО-П имела дальность действия 1500 км и могла обнаруживать и сопровождать одновременно несколько объектов с эффективной поверхностью рассеяния (ЭПР) ~ 1 м2. Модернизацией станции ЦСО-П в РТИ были созданы все последующие модификации этой РЛС – «Днестр», «Днестр-М» и «Днепр».
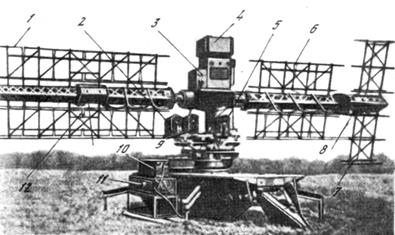
Толчком к разработке принципиально нового подхода к построению РЛС сопровождения многих целей послужило в нашей стране личное указание И.В.Сталина (1948 г.) о создании в кратчайшие сроки системы противовоздушной обороны Москвы, непреодолимой для массированных налетов стратегической авиации. Существовавшие РЛС сопровождения, разработанные во время второй мировой войны, обеспечивали слежение только за одной целью, и даже для уничтожения одного самолета требовалось два радиолокатора: один – для слежения за целью, другой – для cлежения за боевым снарядом – ракетой (такой принцип использовался в американском зенитно-ракетном комплексе Nike). Создать систему ПВО Москвы с использованием таких РЛС было невозможно.

|
| Рис. 38 |
Выход был найден Расплетиным А.А., руководителем работ по радиолокации для системы ПВО. Он предложил радиолокационный комплекс образовать из двух РЛС (рис. 38), одна из которых осуществляла бы обзор (сканирование) сектора пространства (60 градусов) веерообразным лучом в вертикальной плоскости, а другая – в горизонтальной. Сопровождение целей было не физическим, как в традиционных РЛС сопровождения, а алгоритмическим и осуществлялось в ЭВМ. Такое решение для того времени (начало 1950-х годов) было революционным.
Созданный радиолокатор сопровождения впервые в мировой практике был многоцелевым. Он обеспечивал не только обнаружение и автоматическое сопровождение до 20 самолетов в пространственном секторе 60°, но и осуществлял одновременное наведение на самолеты до 20 ракет. Захват ракет после старта осуществлялся автоматически. Для построения радиолокационного кольца вокруг Москвы потребовалось всего 56 радиолокационных комплексов вместо многих сотен традиционных РЛС сопровождения.
Хотя рассмотренные выше системы, вероятно, занимали в то время центральное положение среди радиолокационных разработок, другие военные применения РЛС также не были забыты. Появились небольшие обзорные радиолокаторы для наблюдения за боевой обстановкой, способные обнаруживать такие движущиеся цели, как ползущий солдат, движущиеся джип или танк. Эти радиолокаторы изготовлялись во второй половине 1950-х годов, и в них использовались как непрерывные, так и импульсные режимы. Последние получили сокращенное обозначение PD (pulsed Doppler) – импульсно-доплеровских РЛС.
В числе нескольких созданных типов имелась небольшая переносная установка Silent Sentry (тихий часовой). Эта установка могла обнаруживать движущиеся танки или войска на расстоянии до 4,8 км. Использовалась звуковая индикация – наушники оператора. Различия в звуковых сигналах позволяли отличить человека, идущего шагом, от бегущего на расстояниях до 800 м. Погрешность определения местонахождения объекта наблюдения не превышала 23 м.
В заключение отметим две новинки, появившиеся в 60-е годы и оказавшие заметное влияние на построение радиолокационных систем в последующие годы, это – фазированные антенные решетки и цифровая обработка сигналов.
Фазированная антенная решетка (ФАР) представляет собой антенную систему, составленную из множества отдельных излучателей, каждый из которых связан с передатчиком (или с приемником) через фазовращатель. Изменением фазового сдвига, вносимого фазовращателем, можно изменять как форму диаграммы направленности антенной решетки, так и ее положение в пространстве. В ВВС США была введена в эксплуатацию РЛС с ФАР типа AN/FPS-85 для слежения за спутниками. Станция AN/FPS-85 была первой РЛС с большой ФАР, в которой сканирование луча по обеим угловым координатам производилось посредством фазовращателей с электронным управлением. Разработка станции AN/FPS-85 выявила важность применения ЦВМ для управления работой РЛС с ФАР и показала, что стоимость программных средств может составлять значительную часть общей стоимости системы.
На конец 60-х годов приходится также начало революции, связанной с цифровой обработкой сигналов. К настоящему времени почти все виды обработки сигналов и данных осуществляются цифровыми методами.
| Радиолокация на рубеже XX и XXI столетий [28, 30] |
Начавшись как чисто военная ветвь радиотехники, радиолокация, развиваясь вширь, получила и множество гражданских применений. Одно из них связано с дистанционным зондированием окружающей среды. Сюда относятся такие повседневные задачи, как наблюдение метеообстановки и зондирование ионосферы. РЛС незаменимы для управления воздушным движением и движением в зоне аэропорта. Широко используются малые РЛС для контроля движения транспорта, обнаружения препятствий, охраны территории и т.д. и т.п. Для картографирования и сбора информации используются бортовые самолетные РЛС с синтезированной апертурой.

| |
| Рис. 39 |
Потрясающих характеристик добились создатели супер-РЛС. Так, например, станция “Дарьял” (рис. 39) способна обнаруживать объекты размером с футбольный мяч на дальности свыше 6000 км. Такие РЛС осуществляют постоянный контроль воздушной обстановки над территорией страны и ее окрестностями.
Дата добавления: 2015-06-22; просмотров: 2759;