РАДИОНАВИГАЦИЯ
Свет стройных маяков,
а не светил опальных,
Отважных вел теперь
дорогой странствий дальних.
Э.Верхарн. Заблуждение (1902)
Навигация (лат. – navigatio) происходит от слова navigo – плыву на судне – и обозначает сферу человеческой деятельности, связанную с определением местоположения подвижного объекта и прокладкой курса. Радионавигация – это направление радиотехники, связанное с использованием радиоволн для ориентирования подвижных объектов. Другими словами, средства радионавигации позволяют подвижному объекту определить свое местоположение.
В радионавигации трудно выделить какую-либо личность, внесшую главный вклад в ее развитие. Методы радионавигации появлялись как бы сами собой естественным образом и одновременно во многих странах.
| Радиопеленгация [14] |
Первые предложения, связанные с использованием радио для построения радиомаяков, аналогичных световым или звуковым, были высказаны А.С.Поповым в докладе, прочитанном в Петербургском электротехническом институте 19 октября 1897 г.: “История наших опытов…уже теперь позволяет мечтать о дальнейшем развитии этого дела и о практических применениях его в военно-морском и военном деле на суше, а также в помощь маячным световым и звуковым сигналам, так как электромагнитные волны не задерживаются ни туманом, ни бурей”.
Но если определение направления на световой маяк с корабля не представляло никакой трудности, то при определении направления на радиомаяк возникли проблемы. В начале ХХ века единственным видом радиоаппаратуры на корабле была связная радиостанция. Антенна радиостанции представляла собой вертикальный отрезок провода и обеспечивала одинаковый прием независимо от направления прихода радиосигнала. Поэтому корабельная радиоаппаратура не в состоянии была определить направление прихода радиосигнала. Существовали две возможности: либо определять направление на корабль береговыми системами и передавать ему эту информацию по запросу, используя связную радиостанцию, либо разрабатывать корабельные измерители направления – радиопеленгаторы. И как мы увидим, были использованы оба пути практически одновременно.

    
| ||||||
| Рис. 20 |
Для определения направления нужна была антенна, диаграмма направленности которой отличалась бы от круговой. Такая антенна была известна еще с опытов Герца – это рамочная антенна. Исследование рамочных антенн было проведено в 1905 – 1907 гг., а с 1910 г. началось создание радиопеленгаторов.
На рис. 20 показана диаграмма направленности рамочной антенны в горизонтальной плоскости. Она имеет форму восьмерки. Если источник радиосигнала находится в плоскости рамки (по оси х), то амплитуда принятого сигнала максимальна, а если перпендикулярно к рамке (по оси у), то равна нулю – сигнал с этого направления не принимается.

| 
| 
|
| По максимуму | По минимуму | Равносигнальный |
| а | б | в |
| Рис. 21 |
Возможны три метода определения направления (пеленгации): по максимуму, по минимуму и по равносигнальному направлению (рис. 21). Например, при использовании метода пеленгации по максимуму направление на источник излучения определяется по положению рамки, когда принятый сигнал будет максимальным (ось х). Равносигнальным считается направление, на котором сигналы, принятые двумя антеннами с пересекающимися диаграммами направленности, будут иметь одинаковую амплитуду.
Точность измерения направления зависит от того, насколько заметно изменяется величина принятого сигнала при отклонении от направления на источник радиоизлучения. Как видно из рис. 21, а, небольшое отклонение направления на источник сигнала от направления максимального приема практически не приводит к заметному изменению величины принимаемого сигнала. Для пеленгации по минимуму (рис. 21, б) небольшое изменение направления на источник сигнала вблизи направления нулевого приема приводит к большому изменению величины принятого сигнала. Значит, метод пеленгации по максимуму сигнала обладает наименьшей точностью, а по минимуму наибольшей. Поэтому именно последний стал использоваться в радиопеленгаторах. Промежуточным по точности является равносигнальный метод (рис. 21, в). Впервые принцип равносигнального радиомаяка был предложен Шеллером в 1907 г. и, независимо от него, Кибитцом в 1911 г.
| Береговые радиопеленгаторы [14, 41, 43] |
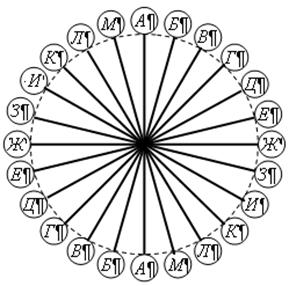
Береговые радиопеленгаторы использовались для определения пеленга корабля, на борту которого находилась радиостанция. Корабль мог узнать свой пеленг, послав запрос со своей связной радиостанции. Для получения надежного пеленга запросивший корабль должен в течение 1 – 2 минут передавать сигналы (позывные или тире) точно на установленной волне. За это время береговой радиопеленгатор определял его пеленг, и затем этот пеленг по радиосвязи передавался на корабль. Вся процедура занимала несколько минут. Первые береговые радиопеленгаторы появились в 1910 – 1914 годах. Русский офицер флота И. И. Ренгартен в 1914 г. разработал радиопеленгатор, содержащий 16 антенн в виде наклонных лучей-радиусов. Антенны располагались по диаметру окружности с разворотом на 22,5о. Строились пеленгаторы и с рамочными антеннами. К концу первой мировой войны было построено около 10 радиопеленгаторов. Для определения направления на источник излучения к антеннам поочередно подключался приемник и по минимуму слышимости определялся пеленг.
Более удобную конструкцию имели гониометрические радиопеленгаторы, в которых поворот диаграммы направленности антенны обеспечивался при неподвижной антенной системе, содержащей две антенны с взаимно перпендикулярными диаграммами направленности. Напряжение снималось с вращающегося трансформатора специальной конструкции – гониометра.
К 1930 г. в мире функционировало более 100 береговых радиопеленгаторных станций.
| Направленные радиомаяки [14, 41, 42, 43] |
В эти же годы создавались радиомаяки с вращающейся диаграммой направленности, излучающие радиосигнал. Они позволяли определять пеленг непосредственно на корабле, используя корабельный связной приемник, по минимуму слышимости принимаемого радиосигнала.
Как же заложить информацию о направлении в излучаемый сигнал? Использовались два способа.
В радиомаяке системы Баженова со скачкообразным вращением диаграммы направленности каждому направлению присваивалась своя буква, точнее, кодовая последовательность в соответствии с азбукой Морзе. Антенное устройство радиомаяка состояло из рамочных антенн, расположенных под одинаковым углом одна относительно другой. На рис. 22 условно показаны расположение рамочных антенн в горизонтальной плоскости и буквы, соответствующие каждой из антенн. Вращение диаграммы направленности обеспечивалось поочередным подключением антенн к передатчику. Соответствующая кодовая последовательность излучалась все время, пока передатчик был подсоединен к антенне. Пользователю была известна связь “буква – направление”, и пеленг определялся по букве, слышимость которой была минимальной.
| 
|
| Рис. 22 | Рис. 23 |
В эти же годы радиомаяк аналогичной конструкции с шестнадцатью антеннами был создан фирмой “Телефункен”. Однако принцип измерения направления был другим. Все антенны поочередно излучали один и тот же сигнал. В момент времени, когда минимум диаграммы направленности антенны был направлен точно на север, излучался опорный сигнал “север” с добавочной ненаправленной антенны. Пеленг определялся по показаниям секундомера, который запускался в момент приема на корабле сигнала ”север” и останавливался в момент минимума слышимости сигнала радиомаяка. Такой способ определения пеленга оказался очень удобным и часто использовался в дальнейшем.
Позже стали сооружаться радиомаяки с вращающейся рамочной антенной (скорость вращения 1 об./мин). Первый такой радиомаяк был построен и испытан в Англии в Фарнбороу в начале 20-х годов прошлого столетия.
В СССР радиомаяк с вращающейся рамкой был установлен на мысе Херсонес (Крым) в 1934 г. Излучающий контур образован шестью витками медной ленты, намотанными на деревянный каркас размером 3×3 м, и воздушным конденсатором, помещенным в центре рамки (рис. 23). Дальность действия радиомаяка до 350 км при точности определения направления порядка 1 – 1,5о. Два аналогичных радиомаяка были установлены в это же время в Арктике.
Рассмотренные выше системы позволяли кораблю, имевшему на борту только корабельную радиостанцию, определить свой пеленг.
| Ненаправленные радиомаяки [14] |
Параллельно разрабатывался и другой вариант системы радиопеленгации: с корабельным радиопеленгатором и ненаправленным береговым радиомаяком. Особенно активно эти работы велись во Франции и США. К 1910 г. на побережье этих стран было установлено около 20 ненаправленных радиомаяков с искровыми передатчиками. Первые корабельные радиопеленгаторы с поворотными рамками и слуховой индикацией появились в России, Франции и США в 1910 – 1914 гг. Дальность действия такой системы пеленгации составляла около 100 км.
Антенное устройство корабельного радиопеленгатора состояло из рамочной антенны и вертикального штыря. Диаграмма направленности такой комбинации антенн – кардиоида. Она имеет одно направление нулевого приема и позволяет однозначно измерять направление.
В 30-х годах производство корабельных слуховых радиопеленгаторов было достаточно хорошо отлажено и сеть ненаправленных радиомаяков быстро расширялась. К 1935 г. по берегам морей располагалось уже более 200 радиомаяков.
| Курсовые радиомаяки [14, 41] |
В 20-х – 30-х годах прошлого столетия необходимость в навигационных системах стала больше ощущаться в авиации, чем на море. Из первой мировой войны США вышли очень богатой страной с развитой авиационной промышленностью. Быстро развивалась коммерческая авиация. Поэтому неудивительно, что именно в этой стране были разработаны курсовые радиомаяки. Они устанавливались по трассе полета самолета через 200 – 300 км и обеспечивали пилотов информацией об отклонении от трассы. Обычно использовался четырехкурсовой радиомаяк, формирующий четыре равносигнальных направления.

|
| Рис. 24 |
В четырехкурсовом радиомаяке использовались две рамочные антенны: 1 и 2 (рис. 24), располагавшиеся, как правило, перпендикулярно друг к другу. Их диаграммы направленности пересекаются, образуя равносигнальные направления I - IV. Одно из направлений, например I – III, должно совпадать с направлением трассы, другое может не использоваться. Сигналы, излучавшиеся антеннами, должны отличаться друг от друга. Обычно использовались “переплетающиеся” сигналы, которые в азбуке Морзе взаимно дополняли друг друга: антенна 1 – букву А (точка – тире), а антенна 2 – букву Н (тире – точка). Если самолет находился на равносигнальном направлении (см. рисунок), то буквы А и Н дополняли друг друга, амплитуда сигнала была постоянной и пилот ничего не слышал. При отклонении от равносигнального направления интенсивность одной из букв становилась преобладающей, в огибающей сигнала присутствовала эта буква и она прослушивалась пилотом. Таким образом, при отклонении самолета в одну сторону от равносигнального направления была слышна буква А, а в другую – буква Н. Пилот должен вести самолет так, чтобы ни одной из этих букв не было слышно.
Введение четырехкурсовых радиомаяков в эксплуатацию шло высокими темпами, особенно в США. Если в 1922 г. там было установлено всего 2 маяка, то к 1932 г. их было 58, а к 1935 г. их стало больше 100. В СССР к 1934 г. было установлено только 10 курсовых радиомаяков на трассах “Москва – Свердловск” и “Москва – Ленинград”.
| Самолетные радиокомпасы [14, 43] |
В 30-х годах корабельные слуховые радиопеленгаторы с индикацией по минимуму слышимости применялись уже достаточно широко. Значительно сложнее оказалась проблема применения радиопеленгаторов на самолетах. Причин этому было несколько. Во-первых, для их размещения требовалось много места. Во-вторых, у пилота была ограниченная возможность работать с радиопеленгатором. Так, например, один из первых немецких самолетных радиопеленгаторов фирмы “Телефункен” содержал 10 ручек управления, а поворотная рамка на полутораметровой колонке имела диаметр 80 см. И, в-третьих, неудобной была слуховая индикация: в кабине пилота было шумно от работающего двигателя и отметить нулевую слышимость принятого сигнала было сложно.
Поэтому в самолетных радиопеленгаторах стали использовать вместо слуховой индикации визуальную (стрелочную), а для уменьшения размеров антенной системы перешли на более короткие волны. Первые самолетные радиопеленгаторы использовались для выведения (привода) самолетов на аэродром, где устанавливался всенаправленный радиомаяк – приводная аэродромная радиостанция (ПАР). Такой радиопеленгатор стал называться радиополукомпасом (РПК). Его индикатор был предельно простым: “лево – нуль – право”. Направление на ПАР соответствовало показанию “нуль”. Об отклонении в сторону говорили показания “лево” или “право”. Антенная система РПК состояла из рамочной антенны (до 15 – 25 см в диаметре) и ненаправленной штыревой антенны (длиной до 50 – 70 см) и имела кардиоидную диаграмму направленности.
Внедрение радиополукомпасов в эксплуатацию началось с 1934 г. В СССР был разработан и широко использовался радиополукомпас РПК-2 (“Чайка”). Он имел компактную антенну, расположенную в обтекателе диаметром около 25 см. Его характеристики были на уровне лучших иностранных образцов того времени.
С появлением радиополукомпасов четырехкурсовые средневолновые радиомаяки из-за сложности введения визуальной индикации стали быстро терять свое значение. Прекратились их производство и установка. И только в США, где были построены и введены в действие сотни таких маяков, они эксплуатировались примерно до середины 50-х годов.
Но радиополукомпас не позволял прокладывать произвольный курс относительно радиомаяка. Поэтому стали разрабатываться самолетные радиопеленгаторы, стрелочные индикаторы которых показывали направление на радиомаяк. Разрабатывались различные варианты, в том числе и с вращающейся рамкой, но наиболее удачным оказался следящий радиопеленгатор, рамка которого автоматически ориентировалась на радиомаяк. Его назвали автоматическим радиокомпасом.
Первый автоматический радиокомпас был создан в 1942 г. в США фирмой “Бендикс”. В СССР автоматический радиокомпас был разработан в 1944 – 1946 гг. под руководством В. Б. Пестрякова. В 1947 г. он был введен в эксплуатацию под названием АРК-5.
| Угломерный метод определения местоположения [41] |
Определение пеленга – важная, но частная задача радионавигации. Вообще-то подвижному объекту нужно определить свое местоположение. И эта задача уже решалась первыми пеленгационными установками (с 1910 г.). Для этого требовалось измерить пеленги корабля относительно двух береговых радиопеленгаторов или радиомаяков, расположение которых заранее известно.

|
| Рис. 25 |
На рис. 25 показан принцип определения местоположения подвижного объекта О по пеленгам α1 и α2 береговых радиопеленгаторов Р1 и Р2. Так как расстояние Р1Р2 между береговыми радиопеленгаторами известно, то положение точки О рассчитывается по стороне и прилежащим к ней углам. Так как пеленг определяется с ошибкой (пунктирные линии), то и местоположение объекта тоже определяется с ошибкой (затененный четырехугольник). Видим, что ошибка определения местоположения увеличивается с увеличением расстояния от объекта до радиопеленгатора. Поскольку для измерения местоположения объекта необходимо знание только направлений на объект (углов), то этот метод называется угломерным. Для определения местоположения 2 – 3 радиопеленгатора объединялись в группу, в которой один был ведущим и рассчитывал местоположение запрашивающего корабля.
| Угломерно-дальномерный метод определения местоположения [14, 41, 42] |
В эти же годы использовался еще один способ определения местоположения корабля по излучению радиомаяка. Он назывался радиоакустическим. Специальные радиомаяки – радиотелеграфные станции “туманных сигналов” – работали синхронно с расположенными рядом подводными или надводными источниками звуковых сигналов. В таких установках имелась возможность измерения дальности от корабля до радиомаяка. Звуковой сигнал принимался на корабле с задержкой относительно радиосигнала на величину
Δt = D/v – D/c,
где v – скорость звука, с – скорость света. Так как c>>v, то расстояние между кораблем и радиомаяком
D = vΔt.
Здесь Δt – время между приемом радиосигнала и звукового сигнала на корабле.
Скорость звука в воде около 1500 м/с. Поэтому ошибка измерения дальности составляла сотни метров. Дальность распространения звуковой волны в воде и, следовательно, максимальная определяемая дальность достигала 12 – 15 миль. Радиоакустический метод измерения дальности широко использовался перед первой мировой войной.

|
| Рис. 26 |
Радиоакустический метод определения координат объекта является угломерно-дальномерным (рис. 26). Для определения своего местоположения объекту О нужно знать местоположение радиомаяка Р, пеленг α и расстояние D от объекта до радиомаяка.
В 50-е годы прошлого столетия этот метод стал применяться в радиосистемах ближней навигации (РСБН), обеспечивающих самолетовождение на расстоянии 300 – 400 км от радиомаяка. В СССР это была система РСБН-2. Бортовая аппаратура, расположенная на самолете, позволяла определять азимут радиомаяка и расстояние до него. Азимут – по временному интервалу между сигналом “север” и моментом приема азимутального сигнала, излучаемого радиомаяком. Дальность – по времени распространения запросного сигнала с самолета на радиомаяк и ответного сигнала радиомаяка на самолет.
| Дальномерный метод определения местоположения [42] |
Если на объекте имеется возможность измерения дальности до двух радиомаяков, положение которых точно известно, то для определения местоположения объекта используется дальномерный метод (рис. 27). Правда, измерение будет неоднозначным: точка, удаленная на расстояния D1 и D2 от радиомаяков Р1 и Р2, может находиться по обе стороны от линии Р1Р2, но эту неоднозначность можно не учитывать, так как примерное расположение объекта относительно радиомаяков, как правило, известно.
Хотя дальномерный метод предлагалось использовать еще в радиоакустических системах, стал применяться он только в 40-х годах прошлого столетия. В конце 30-х годов (1937 – 1938 гг.) в США начала разрабатываться система радионавигации, обладающая высокой точностью и дальностью действия до 400 км. В дальнейшем эта система получила название Шоран (Short Range Navigation).
В систему Шоран входят самолетный запросчик и две наземных ответных станции. Запросчик излучает короткие радиоимпульсы. Ответные станции, приняв эти импульсы, ретранслируют их обратно на самолет. На самолете по задержке принятых импульсов измеряется дальность до каждой из наземных станций и рассчитывается местоположение самолета (при известном расположении радиомаяков).

|
| Рис. 27 |
Первоначально эта система разрабатывалась для обеспечения слепого бомбометания. При бомбометании самолет должен был лететь по дуге, проходящей через цель, центром которой была одна из наземных станций. Точка бомбометания определялась по достижении заданной дальности до другой станции.
Похожая радионавигационная система слепого бомбометания Гобой была разработана в Англии в конце 1942 г. Она отличалась от Шоран тем, что поменялись роли наземного и самолетного оборудования. В Гобое на земле устанавливаются импульсные дальномеры, а самолет снабжается ретрансляционным устройством.
| Разностно-дальномерный метод определения местоположения [14, 24, 43, 44, 45, 46] |
В 1948 г. Радиотехническая комиссия по аэронавтике США предложила создать систему всенаправленных радиомаяков (ВРМ) метрового диапазона и дальномерное оборудование. К октябрю 1950 г. уже имелась 271 станция ВРМ и были приняты в эксплуатацию первые воздушные ВРМ-трассы, связавшие Канзас-Сити, Денвер, Альбукерке, Эль-Пасо, Омаху и Оклахому-Сити в сеть общей протяженностью более 7000 км. К 1952 г. протяженность сети увеличилась до 72000 км.
Для определения местоположения на больших расстояниях от наземных станций ни угломерный, ни дальномерный методы не годились. В угломерном методе при постоянной ошибке пеленгации линейные ошибки определения местоположения растут пропорционально расстоянию от наземной станции (см. рис. 23). В дальномерном методе линейная ошибка в направлении наземной станции остается неизменной с увеличением дальности, но при малых углах пересечения линий постоянной дальности линейная ошибка в одном из направлений (линия ab на рис. 27) сильно увеличивается. Выход был найден в измерении разности расстояний от объекта до наземных станций.
Линии, для которых разность расстояний от двух точек постоянна, являются гиперболами, и разностно-дальномерный метод называют также гиперболическим. Для определения местоположения объекта требуется два семейства гипербол. Поэтому для реализации этого метода необходимы три станции: одна ведущая и две ведомых.
На рис. 28 показаны линии постоянных разностей расстояний для станций А и В и станций А и С. Станция А – ведущая, станции В и С – ведомые. Например, если на подвижном объекте определили, что находятся на разности расстояний между станциями А и С, равной 20, и на разности расстояний между станциями А и В, равной -10, то объект находится в точке D.
|
| Рис. 28 |
Первой разностно-дальномерной радионавигационной системой (РНС) была система Лоран (Long Range Navigation). Она разработана в США на рубеже 30-х – 40-х годов и введена в эксплуатацию в конце 1942 г. на атлантическом побережье США. Ее назвали Лоран-А. Система Лоран-А обеспечивала определение координат местоположения судна с точностью 1 % в пределах зоны с удалением от станций 300 – 800 морских миль днем и до 1500 морских миль ночью.
В первое время она удовлетворяла требованиям кораблевождения и вскоре стала международной. На конец 1963 г. работало 70 станций системы Лоран-А, расположенных по берегам американского и европейского континентов, а также на островах Тихого океана. Цепочки береговых станций Лоран-А (51 пара станций) охватывали около трех четвертей водной поверхности северного полушария. Карты с нанесенной на них гиперболической сеткой имелись у штурмана, и определение местоположения корабля не доставляло никаких проблем.
Но все-таки точность определения местоположения с использованием системы Лоран-А была невысокой. И главное, ее нельзя было улучшить, так как она ограничивалась используемым в системе импульсным методом измерения дальности. Можно ли было уменьшить ошибку измерения дальности? Путь был указан еще в начале 30-х годов Л. И. Мандельштамом и Н. Д. Папалекси.
Леонид Исаакович Мандельштам (5.05.1879 – 27.11.1944)
Родился Л. И. Мандельштам в Могилеве в семье известного врача. Его детство и юность прошли в Одессе. До 12 лет учился дома, затем поступил в III класс гимназии и окончил ее с серебряной медалью в 1897 г. Поступил на физмат Новороссийского университета, который находился в Одессе, но через два года был исключен за участие в студенческих волнениях. В этом же году уехал по настоянию родителей в Страсбург, где поступил на физмат университета. В Страсбургском университете в те годы преподавание физики и математики велось известными учеными. Так, кафедру экспериментальной физики и физический институт университета возглавлял профессор Фердинанд Браун, один из энтузиастов беспроволочного телеграфа, получивший за достижения в этой области Нобелевскую премию вместе с Маркони в 1909 г.
В Страсбургском университете Л. И. Мандельштам познакомился с Н. Д. Папалекси. Профессор Ф. Браун сыграл решающую роль в выборе направления научной деятельности студентов Мандельштама и Папалекси: электромагнитные колебания и их приложение в радиотелеграфии. Первая совместная научная работа Мандельштама и Папалекси вышла в 1904 г., и их научное сотрудничество не прерывалось в течение всей их жизни. После окончания университета они остались там же работать. Мандельштам быстро рос как ученый и преподаватель. С 1903 г. – ассистент, с 1907 г. – приват-доцент, с 1913 г. – профессор Страсбургского университета. Его научные достижения отметил такой титан физики, как Альберт Эйнштейн. Но вмешалась первая мировая война. В 1914 г. Мандельштам и Папалекси возвратились на родину, в Россию. Мандельштам 11 лет провел в поисках места, где можно было бы отдать себя науке и преподаванию. Он переезжал из города в город (Одесса - Петербург – Тифлис – опять Одесса – Москва – Ленинград), пока не получил приглашение на работу от Московского государственного университета. В 1925 г. он переехал в Москву. Теперь у него была возможность заниматься наукой и учить, учить в самом высоком понимании этого слова. В МГУ появилась первая в СССР физическая школа – школа Мандельштама. Круг его интересов широк. Его ученики специализировались в разных областях физики: А. А. Андронов – в теории колебаний, Г. С. Ландсберг – в оптике, М. А. Леонтович – в квантовой механике. С Папалекси он продолжал заниматься исследованиями в области радиотехники.
В 1928 г. Мандельштам избран членом-корреспондентом, а в 1929 – действительным членом АН СССР. В 1936 г. ему была присуждена премия им. Менделеева, в 1942 г. – Государственная премия, в 1944 г. награжден орденом Ленина.
Леонид Исаакович Мандельштам скончался 27 ноября 1944 г.
Николай Дмитриевич Папалекси (2.12.1880 – 3.02.1947)
Н. Д. Папалекси родился в Симферополе в семье военнослужащего. В 4 года остался без отца. Уже в детские годы проявился интерес к физике, математике, астрономии. После окончания Полтавской гимназии в 1899 г. (с золотой медалью) уехал для продолжения образования за границу. Поступил в Берлинский университет, но, отучившись там один семестр, перешел в Страсбургский университет, в котором физико-математические дисциплины преподавались на более высоком уровне. Оставшись работать в университете после его окончания в лаборатории Брауна, Папалекси занимался вопросами генерирования и приема электромагнитных волн, направленного излучения и радиопеленгации.
Уже в Страсбургском периоде проявилась характерная черта Николая Дмитриевича. Он органически не мог оставлять работу незаконченной и чувствовал себя обязанным довести ее до завершения, до прибора, до непосредственного выхода в технику. В этом он дополнял Мандельштама, для которого важно было решить проблему, достичь полной физической ясности, а когда идею надо было практически реализовать, то Мангдельштам терялся, начинал сомневаться в успехе.
Перед первой мировой войной в июле 1914 г. Папалекси переехал в Петербург. С тех пор его деятельность неразрывно связана с отечественной радиофизикой и радиотехникой, где он сразу занял выдающееся место. Он занимался разработкой электронных ламп, усилителей, приемников, пеленгаторных установок. Небольшой отход от практических дел был в годы гражданской войны. С 1918 по 1922 гг. он по приглашению Мандельштама занялся преподаванием физики в только что образованном Одесском политехническом институте. В 1922 г вместе с Мандельштамом переехал в Москву, затем вернулся в Ленинград, в Центральную радиолабораторию (ЦРЛ).
В начале 30-х годов Мандельштамом и Папалекси были разработаны радиоинтерференционные методы измерения расстояний и скорости распространения радиоволн. Интерференционная радиодальнометрия нашла широкое применение в геодезии, картографии и радионавигации. В 40-е годы Н. Д. Папалекси проявлял большой интерес к оптической локации и радиолокации Луны, к радиоизлучению Солнца и космического пространства.
В 1934 г. Н. Д. Папалекси был избран членом-корреспондентом и в 1939 –действительным членом АН СССР. Его работа была отмечена премией им. Менделеева в 1936 г. и Сталинской премией первой степени по физике в 1942 г. В 1945 г. награжден орденом Ленина.
Н. Д. Папалекси скончался 3 февраля 1947 г.

|
| Рис. 29 |
Как показали в начале 30-х годов Л. И. Мандельштам и Н. Д. Папалекси, ошибку измерения дальности можно сделать очень малой, если использовать интерференционные или фазовые методы. В фазовых методах ошибка измерения запаздывания составляет сотые доли периода несущего колебания. Фазометрический метод был реализован в высокоточной измерительной системе МПЩ (название образовано первыми буквами фамилий: Мандельштам, Папалекси, Щеголев). Система использовалась для картографирования местности. При дальности действия 100 – 200 км она обладала погрешностью 10 – 20 м.
Поясним разработанный Мандельштамом и Папалекси метод фазового зонда. Две синхронизированных станции А и В (рис. 29) излучают непрерывные колебания. В точке М находится фазовый зонд, измеряющий разность фаз колебаний, пришедших от станций А и В:
Δφ = ωtA – ωtB = 2πf(DA – DB)/c.
Здесь tA, tB – время распространения электромагнитной волны от станций А и В соответственно до зонда.
Из этого соотношения видно, что при высокой частоте f излучаемого колебания даже небольшое изменение разности расстояний ΔD = = DA – DB приведет к большому изменению разности фаз и может быть зафиксировано. Перемещение зонда, при котором разность расстояний до станций А и В остается неизменной, не вызовет изменений показаний фазометра.
В начале второй мировой войны в Англии стала разрабатываться навигационная система на основе фазовых методов. Английская длинноволновая фазовая гиперболическая система Дека была запущена в середине 1944 г. В ней использовался метод фазового зонда без каких-либо указаний на авторов этого метода.
Появление системы Дека заставило американцев модернизировать систему Лоран-А. В результате работ, проведенных в 1952 – 1958 гг., появилась импульсно-фазовая гиперболическая система Лоран-С. Импульсный метод использовался для грубого определения местоположения судна, а фазовый – для уточнения местоположения. Лоран-С обеспечивала ошибку измерения до 100 м на дальностях до 1400 – 2000 миль. В СССР аналогичная РНС “Чайка” была введена в эксплуатацию в 1969 г.
В 1972 г. в СССР была введена в опытную эксплуатацию фазовая РНС сверхдлинноволнового (8 – 20 кГц) диапазона “Альфа”. Дальность действия системы 10000 км от ведущей станции. Точность местоопределения 2,5...7 км. Аналогичная американская система – “Омега”. Радиоволны сверхдлинноволнового диапазона способны проникать в толщу воды, поэтому с помощью этих систем можно обеспечить навигацию подводных лодок в погруженном состоянии.
Указанные наземные системы вводились в строй, когда уже началось освоение околоземного космического пространства. В 1957 году в СССР группа учёных под руководством В. А. Котельникова экспериментально подтвердила возможность определения параметров движения искусственного спутника Земли (ИСЗ) по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником. Но, что самое главное, была установлена возможность решения обратной задачи — нахождения координат приёмника по измеренному доплеровскому сдвигу сигнала, излучаемого с ИСЗ, если параметры движения и координаты этого спутника известны.
| Низкоорбитальные спутниковые навигационные системы [47] |
В 1963 г. начались работы по созданию первой отечественной низкоорбитальной навигационной спутниковой системы “Цикада”. Вывод навигационных спутников этой системы на орбиту начался в 1967 году с “Космоса-192”. Аналогичная радионавигационная система “Transit” появилась в США в 1964 году. В состав системы входило 7 спутников, находившихся на круговых полярных орбитах с высотой над поверхностью Земли 1100 км.
Координаты потребителя рассчитывалисьна основе измеренной зависимости доплеровского сдвига частоты передатчика одного из спутников от времени. А так как спутник находился в поле видимости только в течение примерно 40 минут, то можно было определить координаты с достаточно высокой точностью лишь для медленно движущихся или стационарных объектов. Перерыв между прохождением различных спутников зоны видимости был от 35 до 90 минут. Это нарушало непрерывность в определении координат объекта.
| Высокоорбитальные спутниковые навигационные системы [47] |

| ||
| Рис. 30 |
В 1967 г. в США начались работы по определению местоположения объекта на основании измерения расстояний от него до спутников, положение которых точно известно. Обратимся к рис. 30. Здесь изображен треугольник, вершинами которого являются центр Земли, спутник – навигационный космический аппарат (НКА) и объект, координаты которого надо определить, обозначенный как навигационная аппаратура пользователя (НАП). В декартовой системе координат, центр которой совпадает с центром Земли, расстояние между спутником и объектом запишется как
 Di = √(X – Xi)2 + (Y – Yi)2 + (Z – Zi)2.
Di = √(X – Xi)2 + (Y – Yi)2 + (Z – Zi)2.
Это расстояние оценивается по задержке сигнала, принятого от навигационного спутника относительно момента излучения этого сигнала ti0. Момент излучения в собственной временной шкале НАП равен t0, и задержка сигнала будет равна:
Δt = ti 0 + tD – t0 = tD – tнш,
где tD = Di /c – время распространения сигнала от спутника до объекта,
tнш – разница между собственным временем спутника и собственным временем объекта, связанная с несовпадением временных шкал.
Тогда измеренная дальность, или, как ее называют, псевдодальность, будет равна:
 Di изм = Di + tншс = √(X – Xi)2 + (Y – Yi)2 + (Z – Zi)2 + tншс.
Di изм = Di + tншс = √(X – Xi)2 + (Y – Yi)2 + (Z – Zi)2 + tншс.
Чтобы найти координаты объекта (X, Y, Z), потребуется четыре таких уравнения, так как неизвестно несовпадение временных шкал tнш.
Как видно из записанного выражения, существуют три фактора, ограничивающие точность измерения координат (X,Y,Z), – это несовпадение временных шкал спутников, неточное знание координат спутников и ошибка измерения расстояния Di.
Спутниковые шкалы времени не должны отличаться более чем на несколько наносекунд. Рассинхронизация излучаемых спутниками навигационных сигналов в 10 нс приводит к погрешности в определении местоположения потребителя на 10 – 15 м. Для обеспечения взаимной синхронизации навигационных радиосигналов, излучаемых орбитальной группировкой НКА, на борту спутников используются атомные стандарты частоты.
Для достижения необходимой точности потребовалось при определении координат спутников учитывать такие факторы, как световое давление, неравномерность вращения Земли и т.п.
 Схема орбит комплекса GPS
Схема орбит комплекса GPS
|
| Рис. 31 |
В США работы по программе “Navstar-GPS” начались в 1973 году. Первые спутники глобальной навигационной системы GPS (Global Position System) были запущены в 1978 г. Полностью система GPS была сформирована в 1994 г. Сеть из 24-х спутников, с высотой орбиты примерно 17700 км и временем полного оборота 12 часов, охватывает зоной обслуживания всю поверхность Земли (рис. 31).
В СССР лётные испытания высокоорбитальной спутниковой навигационной системы Глонасс начались в 1982 году запуском спутника “Космос-1413”. В Глонасс применяются навигационные космические аппараты на круговых геоцентрических орбитах с высотой @19100 км над поверхностью Земли.
Завершаются работы по формированию европейской навигационной системы Galileo. Первый спутник был запущен с Байконура в 2005 г. Планировалось полностью развернуть систему Galileo к 2010 году. По замыслу разработчиков в системе будут использоваться 30 спутников (27 активных и 3 запасных), расположенных на орбитах высотой 23000 км.
GPS и Глонасс создавались в интересах министерств обороны, сейчас же главным потребителем являются население и гражданские организации. Для удобства пользователя производится объединение спутниковых навигационных и мобильных телекоммуникационных технологий.
Дата добавления: 2015-06-22; просмотров: 5004;