Трехфазные электромагниты.
Пример выполнения трехфазного электромагнита показан на рисунок 10.12. Этот электро- магнит предназначен для работы в тормозных устройствах кранового оборудования.
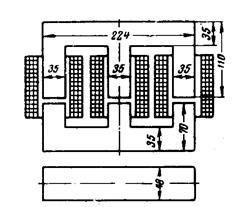
Рисунок 10.12. Трехфазный электромагнит
Он рассчитан на питание напряжением 220 в, 50 гЦ. Каждая катушка имеет по 270 витков медного провода диаметром 1,7 мм. Сопротивление обмотки 0,47 ом. Сила электромагнитного притяжения, действующая на якорь такого электромагнита, неизменна во времени. Теоретически, если не учитывать насыщения, сила притя- жения пропорциональна квадрату напряжения.
Основные типы электромагнитов постоянного тока.
Электромагниты с втягивающимся якорем, или, как их называют, втяжные электромагниты, получили наибольшее распространение в качестве силовых электромагнитов, ос- новным назначением которых является совершать опреде- ленную работу на протяжении известного пути, приводя при этом в движение те или иные рабочие органы различ- ных механизмов.
Особенности характеристик втяжных электромагнитов и их основных расчетных соотношений определяются тем, что якорь у них целиком или частично располагается внутри катушки с обмоткой и в процессе срабатывания до- полнительно погружается в нее. Втягивание якоря проис- ходит как за счет магнитного потока, проходящего через торцовую поверхность якоря, так и за счет действия маг- нитного потока рассеяния, проходящего через его боковую поверхность.
Втяжные электромагниты постоянного тока, как прави- ло выполняются с массивным магнитопроводом. В боль- шинстве случаев они имеют цилиндрическую форму (рисунок 10.13), будучи заключены в сплошную оболочку в виде трубы. Последняя играет роль части магнитопровода, по которой замыкается магнитный поток. Такая форма элек- тромагнита весьма удобна с точки зрения изготовления: все его части представляют собой тела вращения, об- работка которых может производиться на токарных стан- ках.

Рисунок 10.13-Электромагнит с цилиндри- ческим корпусом
Иногда магниты имеют форму параллелепипеда. Однако такая форма является более трудоем- кой в изготовлении и менее выгодной с точки зрения габаритов. Поэтому подобные электромагниты встречаются значительно реже. Исключение составляют электромагни ты с шихтованным Ш-образным магнитопроводом и Т-об разным сердечником. Такая конструкция приме няется в тех случаях, когда с целью унификации произ- водства используется одна и та же. магнитная система как для электромагнитов по стоянного, так и перемен ного тока
Основными частями большинства втяжных цилиндрических электро- магнитов (рисунок 10.13) - являются: подвижный сердечник или якорь 1, неподвижный сердечник или стоп 2, торцовый фланец 3, проходной фланец, охватывающий якорь, 4, корпус 5, катушка б.
Различают следующие основные разновидности втяж ных цилиндрических, электромагнитов.
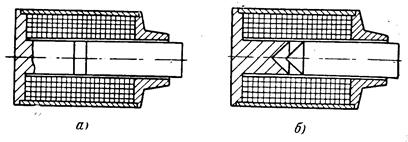
1. Электромагниты, имеющие неподвижный сердечник: а) с якорем, имеющим плоский конец (рис. 6.2,а);
б) с якорем, имеющим конический конец (рис. 6.2,б; в)
в) с якорем, имеющим усеченно-конический конец (рис. 6.2,в).
| 
|
Рисунок 10.14- Электромагниты, имеющие неподвижный сердечник
2. Электромагниты без неподвижного сердечника:
а) с якорем, имеющим ступенчато-цилиндрический ко нец (рис. 6.3,а);
б) с якорем, имеющим суживающийся конец (рис. 6.3,6).
3. Электромагниты с разомкнутой магнитной цепью:
а) втяжные электромагниты с незамкнутой магнитной цепью (рис. 6.4,а);
б) втяжные электромагниты без магнитопровода (рис. 6.4,б).
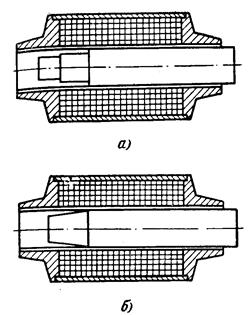 Рисунок 10.15 - Электромагниты без неподвижного сердечника
Рисунок 10.15 - Электромагниты без неподвижного сердечника
|  Рисунок 10.16 - Электромагниты с разомкнутой магнитной цепью
Рисунок 10.16 - Электромагниты с разомкнутой магнитной цепью
|
Большое распространение получили также электромагниты с внешним притягивающимся якорем. Они используются главным образом в маломощных устройствах, особенно в тех случаях, когда важно получить максимальную чув ствительность.
В некоторых случаях из производственных или конструктивных соображений эти электромагниты применяются и для создания достаточно больших сил при существенных перемещениях. Однако в этом случае электромагнит получается относительно большего веса по сравнению с конструкцией с втягивающимся якорем. Исключение составляет одна разновидность электромагнитов с притягивающимся якорем — дисковые электромагниты. Они эффективно используются для создания весьма больших усилий и широко применяются в различных муфтах сцепления, подъемных устройствах и т. п.
Характерной особенностью электромагнитов с внешним притягивающимся якорем является наружное расположение якоря по отношению к катушке. Под действием пронизывающего его магнитного потока якорь или перемещается поступательно на сравнительно малую величину, или поворачивается в пределах небольшого угла. В обоих случаях перемещение происходит в направлении выходящего из якоря или входящего в него магнитного потока. Электромагниты с внешним притягивающимся якорем часто называют клапанными электромагнитами. Не говоря о большом разнообразии подобных электромагнитов в смысле их конструктивного оформления, существенно отметить, что применяется ряд разновидностей в зависимости от типа магнитопровода и расположения якоря относительно катушки. Выбор той или иной конструкции связан со стремлением получить наиболее благоприятные характеристики для данного назначения электромагнита.
Различают следующие основные виды клапанных электромагнитов:
а) электромагниты с одним сердечником, одной катушкой и якорем, расположенным со стороны торца катушки;
б) электромагниты с одним сердечником, одной катуш кой и якорем, расположенным сбоку вдоль образующей катушки;
в) электромагниты с двумя сердечниками, двумя катушками, и якорем, расположенным со стороны торца катушки.
Электромагниты с одной катушкой могут иметь U-об разный, Ш-образный, неполный Ш-образный и цилиндрический магнитопроводы.
У электромагнитов с двумя катушками последние могут соединяться таким образом, что магнитный поток будет проходить последовательно по двум рабочим зазорам (рис. 6.5,а) или параллельными путями (рис. 6.5,б), за- мыкаясь через корпус, который в этом случае должен быть выполнен из ферромагнитного материала.

Рисунок 10.17 - Электромагниты с двумя сердечниками
Наряду с электромагнитами, имеющими втягивающийся внутрь катушки якорь или внешний притягивающийся якорь, применение находят также электромагниты с внешним якорем, движущимся поперечно по отношению к на- правлению рабочего магнитного потока. Подобные электромагниты обладают, как правило, худшими показателями в смысле добротности и экономичности конструкции, чем электромагниты, относящиеся к первым двум группам. Однако они позволяют получать электромеханические характеристики самой различной формы, что является весьма важным достоинством для практического использования электромагнитов. Кроме того, на базе применения внешнего поперечно движущегося якоря легко выполнять поворотные электромагниты, якорь которых совершает не поступательное движение, а вращательное, в пределах достаточно больших углов. В некоторых случаях угол по- ворота якоря таких электромагнитов может достигать по- рядка 60 — 90о. Возможность непосредственного получения углового перемещения якоря в ряде случаев позволяет без дополнительных передач скомпоновать электромагнит с механизмом, для которого он предназначен, и тем самым по- лучить наиболее простую и удачную конструкцию.
Наиболее характерная особенность, отличающая электромагниты с поперечно движущимся якорем от других разновидностей электромагнитов, заключается в том, что у них рабочий воздушный зазор между якорем и полюсами неподвижной части магнитопровода имеет конечную вели- чину на всем протяжении хода. Вследствие этого обстоятельства для таких электромагнитов существует положение равновесия электромагнитных сил, действующих на якорь. В результате этого якорь может находиться во взвешенном состоянии, не будучи притянут и не опираясь на какую- либо часть магнитопровода.
Некоторые разновидности электромагнитов с поперечно движущимся якорем.
Электромагниты с поперечно поступательно движущимся якорем (рисунок 10.17,а)
конструктивно весьма несовершенны и неудобны. Прямолинейное перемещение якоря с необходимыми при этом весьма малыми зазорами трудно осуществить вследствие очень сильного влияния перекосов и возникающих в результате этого сил одностороннего притяжения, вызывающих большие потери полезной силы на преодоление трения.
В электромагнитах с поворотным поперечно движущимся якорем (рисунок. 10.17,б) благодаря креплению последнего в соответствующих подшипниках влияние этого недостатка в значительной степени снижается.
Поворотные электромагниты различаются по взаимному расположению рабочих воздушных зазоров относительно пути магнитного потока.
Рабочие воздушные зазоры могут располагаться по- следовательно (рисунок 10.17,б) и параллельно (рисунок 10.17,в). В первом случае магнитный поток проходит по- следовательно по обоим рабочим воздушным зазорам.
Во втором случае, магнитный поток, входящий в якорь, разветвляется, на ряд составляющих по числу полюсов и проходит через рабочие воздушные зазоры по параллельным путям, собираясь вновь воедино в корпусе электромагнита. Последовательное соединение рабочих зазоров позволяет выполнить магнитную цепь практически без паразитных зазоров. При параллельном соединении на пути рабочего магнитного потока обязательно появляется паразитный зазор (рис. 6.6,в).

Рисунок 10.18 - Различные типы электромагнитов с внешним поперечно движущимся якорем.
В электромагнитах с параллельным соединением зазо- ров число полюсов большей частью лежит в пределах от двух до четырех, хотя встречаются конструкции и с восемью полюсами
При увеличении числа полюсов (рисунок 10.18,г) уменьшается угол поворота якоря электромагнита. Поэтому поворотные электромагниты с большим рабочим ходом, как правило, должны иметь меньшее число полюсов, а с меньшим рабочим ходом выполняются многополюсными.
В ряде случаев практического применения электромагнитов требуется, чтобы время их срабатывания было воз- можно меньшим, т. е. чтобы они имели максимальное быстродействие.
Быстродействующие электромагниты применяются в самых различных случаях: для реле защиты, автоматики и контроля; для привода быстродействующих автоматических воздушных выключателей; для использования в электромеханических отбойных молотках, вибраторах и т. п.
В зависимости от области применения и назначения быстродействующего электромагнита время его срабатывания колеблется от единиц до десятков миллисекунд.
Получение увеличенной скорости срабатывания может быть достигнуто двумя путями:
1) когда требующаяся скорость срабатывания обеспеспечивается самим электромагнитом, конструктивные и расчетные параметры которого обеспечивают быстродействие;
2) когда необходимую скорость срабатывания полу чают благодаря применению специальных схем, в то время, как используемый при этом электромагнит сам по себе не является быстродействующим.
Большое применение в качестве быстродействующего привода находят поляризованные электромагниты.
Во многих случаях бывает необходимо, чтобы требуемая операция была произведена через некоторый промежуток времени после подачи сигнала. Для осуществления подобных устройств, позволяющих получить выдержку времени, могут быть использованы самые различные принципы: механический, пневматический, тепловой и т. д. Широкое применение для этих целей получили устройства с использованием электромагнитов замедленного действия, имеющих искусственно увеличенное время срабатывания. Таким образом, для создания выдержки времени используется процесс нарастания или спадания магнитного потока в электромагните. Наиболее благоприятным в этом смысле является использование процесса возврата якоря электромагнита. В этом случае выдержка времени получается за счет магнитной энергии, запасенной в магнитной системе реле, а ее величина определится тем, как эта энергия будет расходоваться в процессе отключения.
Скорость изменения по- тока зависит от величины индуктивности магнитной системы и электрического сопротивления короткозамкнутых контуров. Индуктивность магнитной системы при разомкнутом якоре значительно меньше, чем магнитной системы с притянутым якорем, поэтому время отпускания электромагнита в 8 — 12 раз больше времени срабатывания, и электромагниты с замедлением работают преимущественно в режиме отключения. Отключение электромагнита осуществляют закорачиванием или разрывом цепи намагничивающей катушки. Поскольку второй способ проще, то он получил более широкое распространение. Основной рабочий процесс электромагнита протекает с момента прекращения питания катушки до момента отпускания якоря. Конструктивная схема
электромагнита с замедлением представ- лена на рисунок 10.19. Замедление определяется временем затухания

Рисунок 10.19 - Устройство электромагнита с замедлением: 1 — сердечник; 2 — демпфирую- щая гильза; 3 — намагничиваю щая катушка; 4 — немагнитная - прокладка; 5 — возвратная пру- жена: 6 — якорь; 7 — основание; 8 - корпус.
магнитного потока от начального установившегося значения Фн до потока отпускания якоря Фотп когда механическое усилие отрыва пружины 5 начнет превышать электромагнитное усилие притяжения якоря к сердечнику. Величину этого времени регулируют изменением натяжения пружины и толщины немагнитной прокладки 4 между якорем и сердечником.
Магнитные системы электромагнитов с замедлением чаще всего применяют клапанного типа (рисунок 10.20 ,а, б, в).
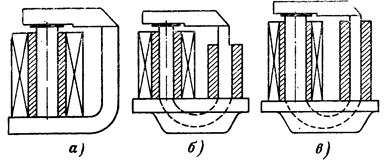
Рисунок 10.20 - Конструкции магнитных систем электромагнитов с замедлением
Представленные варианты исполнения магнитной системы электромагнитов с замедлением далеко не исчерпывают все разновидности, встречающиеся на практике, но сточки зрения особенности расчета они представляют наибольший интерес.
Дата добавления: 2015-06-01; просмотров: 3051;