Законы управления. Типовые регуляторы
Закон управления - это алгоритм или функциональная зависимость, в соответствии с которыми регулятор формирует управляющее воздействие u(t). Эта зависимость может быть представлена в виде
u(t) = F(x, g, f), (8.1)
где F - некоторый оператор от отклонения x, задающего воздействия g и возмущающего воздействия f, а также от их производных и интегралов по времени.
Обычно выражение (8.1) может быть записано следующим образом:
u(t) = F1(x) + F2(g) + F3(f). (8.2)
Здесь первое слагаемое соответствует управлению по отклонению, второе и третье - управлению по внешнему воздействию.
В зависимости от вида оператора F законы управления делятся на стандартные и специальные.
Стандартные законы управления - это универсальные законы, с помощью которых можно решать задачи автоматизации разнообразных технологических процессов и объектов.
Специальные законы управления - это законы, формируемые для решения конкретных задач.
Если для формирования управляющего воздействия u(t) используются только линейные математические операции, то такой закон управления называется линейным, в противном случае - нелинейным.
Линейный стандартный закон управления имеет следующий вид:
 , (8.3)
, (8.3)
где первое слагаемое является пропорциональной, второе - интегральной, третье - дифференциальной составляющими закона, а коэффициенты kП, kИ и kД определяют вклад каждой из составляющих в формируемое управляющее воздействие.
Интегральная составляющая закона управления вводится для повышения точности, а дифференциальная - для повышения быстродействия работы системы.
Регулятор, формирующий управляющее воздействие в соответствии с (8.3), имеет передаточную функцию
 . (8.4)
. (8.4)
Структурная схема линейного стандартного регулятора приведена на рис.8.1.
Настройка такого регулятора заключается в задании значений коэффициентов kП, kИ, kД таким образом, чтобы удовлетворить требованиям качества управления в соответствии с выбранными критериями качества.
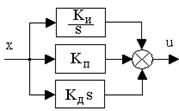
Рис. 8.1. Структура линейного стандартного регулятора
На практике широкое распространение получили типовые или промышленные регуляторы, представляющие собой универсальные автоматические устройства, легко приспосабливаемые для автоматизации разнообразных технологических процессов и объектов. При этом объект управления, как правило, является звеном статического типа, т.е. WОУ(0)=kОУ, где kОУ - коэффициент передачи объекта управления. Типовые регуляторы реализуют типовые законы управления, являющиеся частными случаями линейного стандартного закона управления, и классифицируются следующим образом.
П-регуляторы. Реализуют П-закон или пропорциональный закон управления
u(t) = kП x(t).
Передаточная функция П-регулятора
WR(s) = kП.
Пропорциональное управление позволяет уменьшить установившуюся ошибку в объекте в (1+k) раз, где k = kП´kОУ - коэффициент передачи разомкнутой системы. Регулирование в этом случае получается статическим, так как при любом конечном значении коэффициента передачи разомкнутой системы установившаяся ошибка будет отличной от нуля.
И-регуляторы. Реализуют И-закон или интегральный закон управления
u(t) = 
 .
.
Передаточная функция И-регулятора
 .
.
При интегральном управлении получается система, астатическая по отношению к задающему воздействию. Повышение степени астатизма приводит к увеличению установившейся точности системы, но одновременно снижает ее быстродействие, а также приводит к ухудшению устойчивости. Снижение быстродействия объясняется тем, что в первый момент времени при появлении ошибки управляющее воздействие равняется нулю и только затем начинается его рост. В системе пропорционального управления рост управляющего воздействия в первые моменты времени происходит более интенсивно, так как наличие ошибки сразу дает появление управляющего воздействия, в то время как в системе интегрального управления должно пройти некоторое время.
ПИ-регуляторы. Реализуют ПИ-закон или пропорционально-интегральный закон управления
u(t) = kП x(t) + .
Передаточная функция ПИ-регулятора
 ,
,
где TИ = kП/ kИ.
Пропорционально-интегральное (изодромное) управление сочетает в себе высокую точность интегрального управления (астатизм) с большим быстродействием пропорционального управления. В первые моменты времени при появлении ошибки система с ПИ-регулятором работает как система пропорционального регулирования, а в дальнейшем начинает работать как система интегрального управления.
ПД-регуляторы. Реализуют ПД-закон или пропорционально-диф-ференциальный закон управления
 .
.
Передаточная функция ПД-регулятора
 = kП(TДs + 1),
= kП(TДs + 1),
где TД = kД/ kП.
Пропорционально-дифференциальное управление применяются для повышения быстродействия работы системы.
Регулирование по производной не имеет самостоятельного значения, так как в установившемся состоянии производная от ошибки равна нулю и управление прекращается. Однако она играет большую роль в переходных процессах, потому что позволяет учитывать тенденцию к росту или уменьшению ошибки. В результате увеличивается скорость реакции системы, повышается быстродействие, снижается ошибка в динамике.
ПИД-регуляторы. Реализуют ПИД-закон или пропорционально-интегрально-дифференциальный закон управления, соответствующий линейному стандартному закону вида (8.3).
ПИД-регулятор, представляющий собой астатический изодромный регулятор с предвидением, обеспечивает повышенную точность и повышенное быстродействие системы.
В общем случае закон управления может иметь сложный вид.
Дата добавления: 2015-06-01; просмотров: 1694;