Регулирование при постоянном моменте.
3. Плавность. Число ступеней добавочных реостатов более 3-х не целесообразно, следовательно, регулирование ступенчатое.
4. Стабильность. При увеличении добавочного сопротивления вводимого в цепь ротора жесткость рабочей части механической характеристики уменьшается и соответственно ухудшается стабильность работы ЭП в области малых скоростей.
5. Энергетическая эффективность. При введении добавочных сопротивлений в цепь ротора, так называемая энергия или мощность скольжения, потребляемая ротором АД рассеивается в окружающую среду и добавочном сопротивлении, так же как и электрические потери в обмотке ротора и статора. Рассмотрим понятия энергии (мощность скольжения) и определим зависимость этой энергии от скорости вращения ЭД. Если мощность, потребляемую из сети обозначить  и при этом пренебречь магнитными потерями в статоре, то эту мощность через механические параметры можно выразить в виде:
и при этом пренебречь магнитными потерями в статоре, то эту мощность через механические параметры можно выразить в виде:

Механическая мощность отдаваемая двигателем механизму  , может быть представлена как :
, может быть представлена как :

Тогда за вычетом электрических и механических потерь в двигателе мощность скольжения  можно представить :
можно представить :

Таким образом, если снизить угловую скорость двигателя  по отношению к
по отношению к  в 2 раза, то мощность скольжения будет составлять примерно
в 2 раза, то мощность скольжения будет составлять примерно  потребляемой мощности, что приведёт к уменьшению КПД примерно на 50%.
потребляемой мощности, что приведёт к уменьшению КПД примерно на 50%.
Вывод: реостатное регулирование энергетически не эффективно.
Учитывая то, что реостатное регулирование не обеспечивает высоких показателей качества при низких скоростях вращения (низкие КПД и стабильность),  .
.
Однако некоторые низкие показатели в частности плавность может быть улучшена.
Способом улучшения плавности является «параметрическое импульсное регулирование», на Рис.110.
 - высокочастотный ключ (тиристор или транзистор)
- высокочастотный ключ (тиристор или транзистор)
 - дроссель, предназначенный для сглаживания пульсаций выпрямленного напряжения на зажимах ротора, который с частотой 600-800 Гц размыкает и замыкает цепь добавочного сопротивления. Частота 600-800 Гц выбрана для снижения коммутационных перенапряжений ключа К.
- дроссель, предназначенный для сглаживания пульсаций выпрямленного напряжения на зажимах ротора, который с частотой 600-800 Гц размыкает и замыкает цепь добавочного сопротивления. Частота 600-800 Гц выбрана для снижения коммутационных перенапряжений ключа К.
Если обозначить время в течение которого  замкнут
замкнут  , а время в течении которого , разомкнут
, а время в течении которого , разомкнут  , то скважность управляемых импульсов
, то скважность управляемых импульсов  . При этом
. При этом  .
.
Т.о., плавно изменяя скважность  до
до  , можно в пределах диапазона регулирования , плавно изменить угловую скорость вращения двигателя.
, можно в пределах диапазона регулирования , плавно изменить угловую скорость вращения двигателя.
|
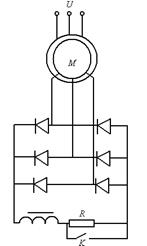
Рис. 109 Схема параметрического импульсного регулирования
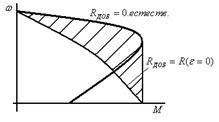
Рис. 110 Механические характеристики при параметрическом импульсном регулировании
Дата добавления: 2015-05-08; просмотров: 1283;