Скелет конечностей человека
Скелет каждой конечности разделяется на пояс и свободный отдел (см. рис. 2.14). Пояс расположен в пределах туловища, является для конечностей опорой и соединяет их свободный отдел со скелетом туловища.
Пояс верхней конечности состоит из двух отдельных парных костей — ключицы и лопатки.
Свободный отдел состоит из трех частей: проксимальный (плечо), средний (предплечье) и дистальный (кисть).
Пояс нижней конечности образован с каждой стороны одной тазовой костью. Тазовая кость сочленяется с крестцом и с ближайшей костью свободного отдела конечности (бедренной костью).
Свободный отдел состоит из трех частей: проксимальной (бедро), средней (голень) и дистальной (стопа).
Кости человеческого тела соединяются между собой посредством плотной волокнистой соединительной ткани, эластической ткани и хряща.
Все соединения костей можно разделить на две группы: в первой связующая ткань представляет сплошную прослойку между костями; это непрерывные соединения — синартрозы, большей частью малоподвижные или неподвижные. Подвижность их определяется растяжимостью той ткани, которая соединяет кости. Вторую группу составляют прерывные соединения более или менее подвижные, иначе сочленения, или суставы; здесь в ткани, соединяющей кости, имеется полость, непрерывность связи между костями нарушается.
Некоторые кости, например, позвонки, связаны между собой различными видами соединений, среди которых имеются суставы, синхондрозы, синдесмозы.
Следует отметить, что суставы верхней конечности отличаются большей свободой и разнообразием движений, суставы нижней конечности также весьма подвижны при меньших степенях свободы в некоторых из них (например, в тазобедренном по сравнению с плечевым, или в голеностопном по сравнению с лучезапястным и т. д.).
Нижние конечности человека служат исключительно для опоры и передвижения тела, а верхние, свободные от этой работы, развились в орган трудовой деятельности.
Кроме скелета, система органов движения включает мускулатуру (см. рис. 13.2). Мышца соединяется с костью сухожилием посредством врастания коллагеновых волокон в надкостницу или надхрящницу, либо непосредственно в кость или хрящ. Сухожилия обеспечивают крепление мышц к костям, а также передачу мышечных усилий.
Прочность сухожилия при растяжении достигает от 44 до 67 МПа, хотя для дельтовидного сухожилия было получено значение разрушающего напряжения порядка 0,6 МПа.
Поперечнополосатые мышцы теснейшим образом (анатомически и физиологически) связаны со скелетом, образуя вместе с ним систему органов опоры и движения.
Общее число скелетных мышц в теле человека — более 600. Масса их составляет у женщин до 28—35% от массы тела, у мужчин — до 40—45%, у спортсменов — 55—65%. Приблизительно 50% общей массы скелетных мышц приходится на нижние конечности, 30% — на верхние конечности и 20% — на мышцы головы и туловища.
Скелетные мускулы, которые начинаются от костей (иногда от фасций и их производных), к костям и прикрепляются.
Важным в механике является вспомогательный аппарат мышц, включающий фасции, синовиальные сумки, влагалища сухожилий, блоки мышц, сесамовидные кости.
Фасции — фиброзные оболочки, покрывающие мышцы и отдельные группы мышц. Фасции выполняют опорную функцию, крепятся к кости образуя фасциальные футляры.
Синовиальные сумки — тонкостенные изолированные мешочки, не связанные с полостью сустава и содержащие синовиальную жидкость.
Влагалища сухожилий — защитные приспособления сухожилий мышц в местах их наиболее тесного прилегания к кости (в области кисти и стопы). Они уменьшают трение, облегчая работу мышц.
Обычно мышцы действуют на кости, соединенные между суставами, так что получается тот или иной род рычага. Особенно ясно выражено это на конечностях: здесь длинные кости образуют систему легких и прочных рычагов, и в то же время представляют обширную поверхность, где прикрепляется высокодифференцированная мускулатура.
Примером рычага первого рода может служить работа мышц при удержании головы (рис. 17.40) или тела в тазобедренном суставе. При удержании груза в руке, согнутой в локтевом суставе, образуется рычаг второго рода (рис. 17.41.).
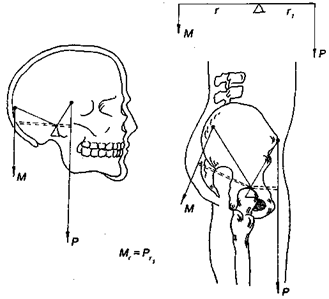
Рис. 17.40.Рычаги первого рода:
р — вектор парциального центра тяжести; М — вектор приложения мышечной силы; r и r1 — плечи рычагов
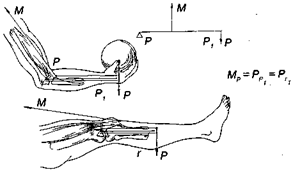
Рис. 17.41. Рычаги второго рода: Р — вектор парциального центра тяжести; М - вектор приложения мышечной силы; r и r1 — плечи рычагов
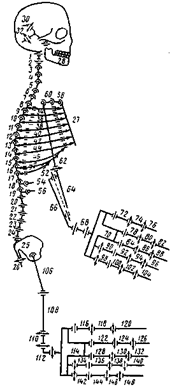
Рис. 17.42.Структурная схема опорно-двигательного аппарата человека (по A. Moreckietal, 1981)
В механике подвижное соединение двух звеньев, находящихся в непосредственном соприкосновении, называют кинематической парой. Кинематические пары могут быть вращательными и поступательными. В зависимости от числа ограничений, накладываемых на движение, звенья могут совершать от одного до пяти движений. В человеческом организме число независимых движений костей в суставах может составлять от одного до трех. На рис. 17.42 показана кинематическая схема ОДА человека, на которой кости представлены в виде звеньев кинематической цепи, а суставы — кинематических пар.
При исследовании движений человека широко применяют кинематические модели на основе уравнений движения системы твердых тел, которые соответствуют отдельным сегментам тела по геометрическим и масс-инерционным характеристикам; элементы модели соединяются вращательными шарнирами, диапазоны поворотов которых соответствуют амплитудам угловых движений суставов; механические связи модели с окружающей средой часто заменяют действием сил реакции, что позволяет сохранять структуру модели при различных движениях.
Важной особенностью таких биомеханических моделей является их ветвящаяся структура типа «дерево». Отсчет координат может начинаться от различных элементов в зависимости от того, какие из них находятся в контакте с опорой.
В зависимости от целей исследования можно условно разделить модели такого типа на две группы: кинематические и динамические (И.Ф. Образцов и др., 1983). Кинематическими называют модели, предназначенные для описания движений тела человека и дающие зависимости угловых и линейных перемещений (скоростей, ускорений) отдельных его точек в функции времени. Динамические модели позволяют оценивать распределение сил, напряжений и деформаций в различных сегментах, структурах и тканях тела человека, в частности, для модельной оценки переносимости различных динамических воздействий.
Кинематика опорно-двигательного аппарата (ОДА)
Рассмотрим кинематику руки человека (рис. 17,43). С точки зрения биомеханики, верхняя конечность может быть смоделирована многозвенным пространстввенным механизмом (рис. 17.43, д). Эта система имеет семь степеней свободы. Плечевой сустав является шаровидным, т. е. имеет три степени свободы. На рис. 17.43, г он представлен эквивалентной схемой одноосных шарниров, оси вращения которых пересекаются в одной точке, а звенья 1, 2 имеют нулевую длину. Значит, положение седьмой системы координат в абсолютной, нулевой системе координат определяет формула:

где —  — радиус-вектор точки С в абсолютной системе координатных осей;
— радиус-вектор точки С в абсолютной системе координатных осей;  — радиус-вектор точки С в седьмой системе координат.
— радиус-вектор точки С в седьмой системе координат.
Анализируя угловые перемещения, скорости и ускорения звеньев руки при исполнении различных целенаправленных движений типа «возьми-поставь» можно оценивать качественно и количественно процесс реабилитации пациента или использование протеза. Естественно, что при построении кинематической схемы и анализа движений нужно учитывать антропометрические данные (табл. 17.8) и ограничения, налагаемые на движения в суставах (табл. 17.9).
На рис. 17.44 приведена схема двухзвенного механизма, которым моделируется движение нижней конечности в фазе опоры. Такая схема позволяет определить перемещение мгновенного центра вращения бедра.
Считается, что плоское движение нижней конечности происходит в сагиттальной плоскости вокруг оси голеностопного сустава, остающейся неподвижной. За обобщенные координаты принимаются углы Ф[(0 и ф2(0- На рис. 17.44 показаны абсолютная и локальные оси координат. Положение точки С в абсолютной системе координатных осей находят по формуле:

Здесь r2 = (0,0, О, 1)т; В2 = A1A2, где Аi - матрица положения.
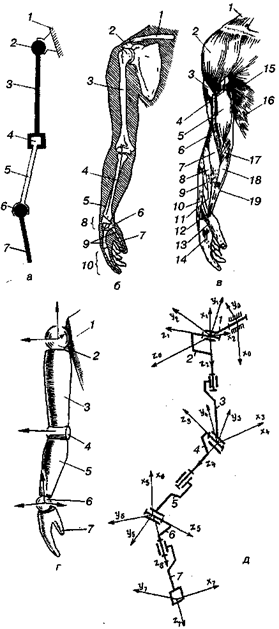
Рис. 17.43.Рука и ее кинематическая расчетная схема:
б — скелет руки: 7 — ключица, 2 — клювовидный отросток лопатки, 3 — плечевая кость, 4 — лучевая кость, 5 — локтевая кость, 6 — трапециевидная кость, 7 — проксимальная фаланга большого пальца, 8 — кости запястья, 9 — пястные кости, 10 — фаланги пальцев, д — система координат звеньев; а — кинематическая схема: 1 — «плечевой» пояс, 2 — плечевая сферическая кинематическая пара, 3 — плечо, 4 — локтевая цилиндрическая пара, 5 — предплечье, 6 — кистевая сферическая пара, 7 — кисть, в — мышцы верхней конечности: 1 — трапециевидная, 2 — дельтовидная, 3 — трехглавая мышца плеча, 4 — клювоплечевая, 5 — двуглавая мышца плеча, 6 — плечевая, 7 — плечелучевая, 8 — длинный лучевой разгибатель запястья, 9 — короткий лучевой разгибатель запястья, 10 — разгибатель пальцев, 11 — длинная отводящая мышца большого пальца, 12—короткий разгибатель большого пальца, 13 — длинный разгибатель большого пальца, 14 — межкостная мышца, 15 — передняя зубчатая мышца, 16 — наружная косая мышца живота, 17 — круглый пронатор, 18 — лучевой сгибатель запястья, 19 — длинная ладонная мышца, г—динамическая модель: 1 — туловище, 2 — плечевой шарнир, 3 — плечо, 4 — локтевой шарнир, 5 — предплечье, 6— шарнир кисти, 7— кисть. Стрелки — компоненты мышечных моментов в суставах
Таблица 17.8
Статические антропометрические параметры (Б.Ф. Ломов и др., 1982)
| Поза | № на рис. 7.46, А | Значение, см | ||||
| Параметр | мужчины | женщины | ||||
| М | σ | М | σ | |||
| Стоя | Длина тела | 167,8 | 5,8 | 156,7 | 5,7 | |
| Длина тела с вытянутой вверх рукой | 213,8 | 8,4 | 198,1 | 7,6 | ||
| 3 | Ширина плеч | 44,6 | 2,2 | 41,8 | 2,4 | |
| Длина руки, вытянутой вперед | 64,2 | 3,3 | 59,3 | 3,1 | ||
| Длина руки, вытянутой в сторону | 62,2 | 3,3 | 56,8 | 3,0 | ||
| Длина плеча | 32,7 | 1,7 | 30,2 | 1,6 | ||
| Длина ноги | 90,1 | 4,3 | 83,5 | 4,1 | ||
| Длина бедра | ||||||
| Высота ротовой точки | 151,3 | 5,6 | 142,2 | 5,5 | ||
| Высота глаз | 155,9 | 5,8 | 145,8 | 5,5 | ||
| Высота плечевой точки | 137,3 | 5,5 | 128,1 | 5,2 | ||
| Высота ладонной точки | 51,3 | 3,5 | 48,3 | 3,6 | ||
| Сидя | Длина тела | 130,9 | 4,3 | 121,1 | 4,5 | |
| Высота глаз над полом | 118,0 | 4,3 | 109,5 | 4,2 | ||
| Высота плеча над полом | 100,8 | 4,2 | 92,8 | 4,1 | ||
| Высота локтя над полом | 65,4 | 3,3 | 60,5 | 3,5 | ||
| Высота колена над полом | 50,6 | 2,4 | 46,7 | 2,7 | ||
| Длина тела над сиденьем | 88,7 | 3,1 | 84,1 | 3,0 | ||
| Высота глаз над сиденьем | 76,9 | 3,0 | 72,5 | 2,8 | ||
| Высота плеча над сиденьем | 58,6 | 2,7 | 56,0 | 2,7 | ||
| Высота локтя над сиденьем | 23,2 | 2,5 | 23,5 | 2,5 | ||
| Длина предплечья | 36,4 | 2,0 | 33,4 | 1,8 | ||
| Длина вытянутой ноги | 104,2 | 4,8 | 98,3 | 4,7 | ||
| Длина бедра | 59,0 | 2,7 | 56,8 | 2,8 |
Таблица 17.9
Дата добавления: 2015-05-03; просмотров: 1511;