Мышечная ткань
Мышечная активность — это одно из общих свойств высокоорганизованных живых организмов. Вся жизнедеятельность человека связана с мышечной активностью. Она обеспечивает работу отдельных органов и целых систем: работу опорно-двигательного аппарата, легких, сосудистую активность, желудочно-кишечного тракта, сократительную способность сердца и т. д. Нарушение работы мышц может привести к патологии, а ее прекращение — даже к летальному исходу (например, смерть при электротравме от удушья в результате парализации дыхательных мышц).
Мышцы разнообразны по форме, размерам, особенностям прикрепления, величине максимально развиваемого усилия. Количество мышц превышает число звеньев тела. Мышца состоит из большого числа двигательных единиц, каждая из которых управляется через собственный мотонейрон. Таким образом, количество управляющих воздействий в мышечной (нервно-мышечной) системе огромно. Тем не менее эта система обладает удивительной надежностью и широкими компесаторными возможностями, способностью не только многократно повторять одни и те же стандартные комплексы движений, но и выполнять нестандартные произвольные движения. Помимо способности организовывать и активно заучивать необходимые движения, эта система обеспечивает приспособляемость к быстро меняющимся условиям окружающей и внутренней среды организма, изменяя применительно к этим условиям привычные действия.
Пример
Испытуемым предлагалось выполнить дифференцированные нажимы пальцем руки на жесткую опору в следующих ситуациях:
1) при переходе в невесомость;
2) в состоянии невесомости;
3) при возвращении в нормальные условия.
Наихудшее выполнение данного навыка наблюдалось в случае (1), к концу (2) в известной мере восстанавливалась способность дифференцировать нажимы. Переход (3) вновь нарушает координацию данного движения, которая, однако, вскоре полностью восстанавливается.
Деятельность мышц отражается в структуре движения. Благодаря этому становится возможным, наблюдая движение, получать информацию о мышечной регуляции движения и ее нарушениях. Такой возможностью широко пользуются при диагностике заболеваний, при разработке специальных тестов для контроля двигательных навыков у спортсменов.
Независимо от назначения, особенности строения и способов регуляции принцип работы различных мышц организма одинаков.
В состав мышц входит совокупность мышечных клеток (волокон), внеклеточное вещество (соединительная ткань), состоящее из коллагена и эластина, а также густая сеть нервных волокон и кровеносных сосудов.
Мышцы по строению разделяются на два вида:
| Гладкие мышцы, основу которых составляют веретеновидные клетки с удлиненным ядром; они не имеют поперечной исчерченности; характеризуются медленным сокращением, малой затратой энергии и малой утомляемостью | Кишечник, стенки внутренних органов (сосудов, желудка, мочевого пузыря) некоторых желез |
| Поперечно-полосатые мышцы состоят из длинных (несколько см) многоядерных волокон (скелетные мышцы), или из относительно коротких (сердечная мышца), имеющих поперечную исчерченность, которая обусловлена регулярно расположенными миофибриллами | Скелетные мышцы, мышцы сердца; мышцы, прочно прикрепленные к костям и обеспечивающие движения головы, туловища, конечностей |
Режим работы мышц может быть весьма разнообразным. Различают три основных вида таких режимов: изометрический, изотонический, ауксотонический, когда сокращение мышцы происходит в условиях некоторого предварительного растяжения.
Для исследования характеристик сокращения мышц реализуют два искусственных режима.
Изометрический режим — когда напряжение мышцы происходит в искусственных условиях сохранения ее длины, что достигается с помощью фиксатора. Схема опыта для реализации этого режима показана на рис. 11.20, а.
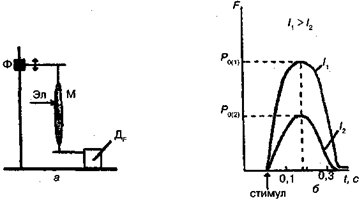
Рис. 11.20. Изометрический режим: а) схема установки для реализации режима:
Ф — фиксатор длины, М — мышца, Эл — электрод,
ДF — датчик силы; б) временная зависимость развиваемой силы F
одиночного сокращения мышцы при изометрическом режиме
сокращения, I — длина мышцы, Р —, максимальная сила
После установки длины на электроды (Эл) подается электрический стимул. В возбужденной мышце развивается сила F (напряжение), которая регистрируется датчиком силы (ДF). Максимальная сила Р0, которую может развивать мышца, зависит от ее начальной длины и области перекрытия актиновых и миозиновых нитей, в которой могут замыкаться мостики: при начальной длине саркомера 2,2 мкм в сокращении участвуют все мостики.
Если длина мышцы больше, то и количество мостиков в мышце больше, поэтому и возникающая сила будет больше. На рис. 11.20, б большей длине мышцы (l1 > l2) соответствует большая сила (Р01 > Р02).
Изотонический режим — когда искусственно поддерживается постоянство напряжения мышцы. Например, мышца поднимает постоянный груз Р = const, а регистрируется изменение ее длины при сокращении.
Схема опыта для реализации этого режима показана на рис. 11.21, а.
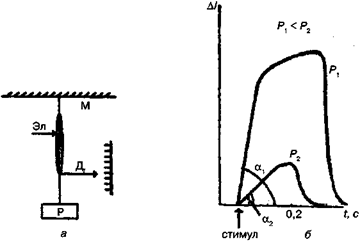
Рис. 11.21.Изотонический режим:
а) схема установки для реализации режима: Р — нагрузка, Д, — датчик изменения
длины; б) временная зависимость изменения длины мышцы ∆l одиночного
сокращения мышцы , Р — нагрузка
При этом режиме к незакрепленному концу мышцы подвешивается груз Р, а на электроды подается электрический импульс. Регистрируется сокращение мышцы, т. е. изменение ее длины ∆l со временем. В изотоническом режиме мышца быстро сокращается до определенной длины, а затем расслабляется. Вид зависимости ∆l (t) для двух различных нагрузок показан на рис. 11.21, б. При изотоническом режиме имеет место следующее: чем больше груз Р, тем меньше укорочение мышцы и короче время удержания груза. При некоторой нагрузке Р = Р0 мышца совсем перестанет поднимать груз. Это значение Р0 и будет максимальной силой изометрического сокращения для данной мышцы (рис. 11.20, б).
При увеличении нагрузки угол наклона восходящей части кривой изотонического сокращения уменьшается: α2 < α2 рис. 11.21, б. Это означает, что скорость укорочения с ростом нагрузки падает.
Дата добавления: 2015-05-03; просмотров: 1071;