Архитектура сопроцессора
Сопроцессор дополняет возможности основного процессора и предназначен для:
– поддержки арифметики с плавающей точкой,
– поддержки численных алгоритмов вычисления значений тригонометрических функций, логарифмов и т.п,
– обработки десятичных чисел с точностью до 18 разрядов, что позволяет сопроцессору выполнять арифметические операции без округления над целыми десятичными числами со значениями до 1018,
– обработки вещественных чисел из диапазона 3,37*10-4932..1.18*10+4932
С точки зрения программиста, сопроцессор представляет собой совокупность регистров, каждый из которых имеет свое функциональное назначение (рис. 19.1). В программной модели сопроцессора можно выделить три группы регистров.
1. Восемь регистров r0,…,r7 составляющих основу программной модели сопроцессора – стек сопроцессора. Размерность каждого регистра 80 битов.
2. Три служебных регистра:
регистр состояния сопроцессора swr (Status Word Register — регистр слова состояния) – отражает информацию о текущем состоянии сопроцессора. В регистре swrсодержатся поля, позволяющие определить: какой регистр является текущей вершиной стека сопроцессора, какие исключения возникли после выполнения последней команды, каковы особенности выполнения последней команды (некий аналог регистра флагов основного процессора) и т. д.;
управляющий регистр сопроцессора cwr (Control Word Register — регистр слова управления) – управляет режимами работы сопроцессора. С помощью полей в этом регистре можно регулировать точность выполнения численных вычислений, управлять округлением, маскировать исключения;
регистр слова тегов twr (Tags Word Register – слово тегов) – используется для контроля за состоянием каждого из регистров r0,…,r7. Команды сопроцессора используют этот регистр, например, для того, чтобы определить возможность записи значений в эти регистры.
3. Два регистра указателей — данных dpr (Data Point Register) и команд ipr (Instruction Point Register). Они предназначены для запоминания информации об адресе команды, вызвавшей исключительную ситуацию и адресе ее операнда. Эти указатели используются при обработке исключительных ситуаций (но не для всех команд).
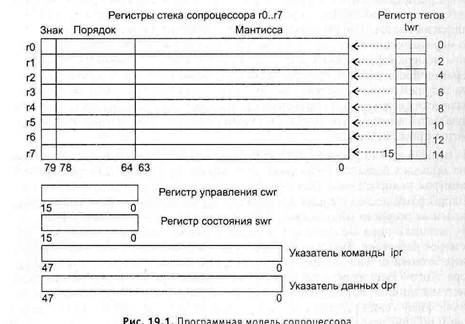
Рис.1. Программная модель сопроцессора
Все эти регистры являются программно доступными.
Рассмотрим общую логику работы сопроцессора и более подробно охарактеризуем перечисленные регистры.
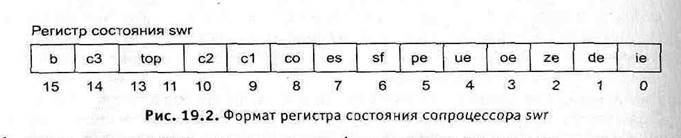
Регистровый стек сопроцессора организован по принципу кольца. Это означает, что среди всех регистров, составляющих стек, нет такого, который является вершиной стека. Напротив, все регистры стека с функциональной точки зрения абсолютно одинаковы и равноправны. Но, как известно, в стеке всегда должна быть вершина. И она действительно есть, но является плавающей. Контроль текущей вершины осуществляется аппаратно с помощью трехбитового поля top регистра swr (рис, 19.2). В поле top фиксируется номер регистра стека 0...7 (r0,…,r7), являющегося в данный момент текущей вершиной стека.
Команды сопроцессора не оперируют физическими номерами регистров стека r0...r7. Вместо этого они используют логические номера этих регистров st(0)...st(7). С помощью логических номеров реализуется относительная адресация регистров стека сопроцессора.
Отметим, каким образом «уживаются» между собой процессор и сопроцессор. Каждое из этих устройств имеет свои, несовместимые друг с другом системы команд и форматы обрабатываемых данных. Несмотря на то что сопроцессор архитектурно представляет собой отдельное вычислительное устройство, он не может существовать отдельно от основного процессора. Начиная с модели i486 сопроцессор и основной процессор производятся в одном корпусе и являются физически неделимыми, то есть архитектурно это по-прежнему два разных устройства, а аппаратно – одно.
Процессор и сопроцессор, являясь двумя самостоятельными вычислительными устройствами, могут работать параллельно. Но этот параллелизм касается только их внутренней работы над исполнением очередной команды. Оба процессора подключены к общей системной шине и имеют доступ к одинаковой информации. Инициирует процесс выборки очередной команды всегда основной процессор. После выборки команда попадает одновременно в оба процессора. Любая команда сопроцессора имеет код операции, первые пять бит, которого имеют значение 11011. Когда код операции начинается этими битами, то основной процессор по дальнейшему содержимому кода операции выясняет, требует ли данная команда обращения к памяти. Если это так, то основной процессор формирует физический адрес операнда и обращается к памяти, после чего содержимое ячейки памяти выставляется на шину данных. Если обращение к памяти не требуется, то основной процессор заканчивает работу над данной командой (не делая попытки ее исполнения!) и приступает к декодированию следующей команды из текущего входного командного потока. Что же касается сопроцессора, то выбранная команда, как уже было отмечено, попадает в него одновременно с основным процессором. Сопроцессор, определив по первым пяти битам, что очередная команда принадлежит его системе команд, начинает ее исполнение. Если команда требовала операнд в памяти, то сопроцессор обращается к шине данных за чтением содержимого ячейки памяти, которое к этому моменту предоставлено основным процессором. Из этой схемы взаимодействия следует, что в определенных случаях необходимо согласовывать работу обоих устройств.
К примеру, если во входном потоке сразу за командой сопроцессора следует команда основного процессора, использующая результаты работы предыдущей команды, то сопроцессор не успеет выполнить свою команду за то время, когда основной процессор, пропустив сопроцессорную команду, выполнит свою. Очевидно, что логика работы программы будет нарушена. Возможна и другая ситуация. Если входной поток команд содержит последовательность из нескольких команд сопроцессора, то, очевидно, что процессор в отличие от сопроцессора проскочит их очень быстро, чего он не должен делать, так как он обеспечивает внешний интерфейс для сопроцессора.
Эти и другие, более сложные, ситуации приводят к необходимости синхронизации между собой работы двух процессоров. В первых моделях микропроцессоров это делалось путем вставки перед или после каждой команды сопроцессора специальной команды wait или fwait. Работа данной команды заключалась в приостановке работы основного процессора до тех пор, пока сопроцессор не закончит работу над последней командой. В моделях микропроцессора (начиная с i486) подобная синхронизация выполняется командами wait/fwait, которые введены в алгоритм работы большинства команд сопроцессора. Но для некоторых команд из группы команд управления сопроцессором (см. далее) оставлена возможность выбора между командами с синхронизацией (ожиданием) и без нее.
Из всего сказанного можно сделать важный вывод: использование сопроцессора является совершенно прозрачным для программиста. В общем случае ему следует воспринимать сопроцессор как набор дополнительных регистров, для работы с которыми предназначены специальные команды.
Регистр состояния swr
Регистр swr отражает текущее состояние сопроцессора после выполнения последней команды. Структурно регистр swr (см. рис. 19.2) состоит из:
– 6 флагов исключительных ситуаций;
– бита sf (Stack Fault) — ошибка работы стека сопроцессора. Бит устанавливается в единицу, если возникает одна из трех исключительных ситуаций (см. ниже) — РЕ, UE или IE. В частности, его установка информирует о попытке записи в заполненный стек, или, напротив, попытке чтения из пустого стека. После того как вы проанализировали этот бит, его нужно снова установить в ноль, вместе с битами РЕ, UE или IE (если они были установлены);
– бита es (Error Summary) — суммарная ошибка работы сопроцессора. Бит устанавливается в единицу, если возникает любая из шести перечисленных ниже исключительных ситуаций;
– четырех битов с0–с3 (Condition Code) — кода условия. Назначение этих битов аналогично флагам в регистре eflags основного процессора — отразить результат выполнения последней команды сопроцессора;
– трехбитного поля top. Поле содержит указатель регистра текущей вершины стека.
Почти половину регистра swr занимают биты (флаги) для регистрации исключительных ситуаций. На уроке 15 нами была введена классификация прерываний по месту их возникновения (внешние и внутренние). Внутренние прерывания возникают в ходе работы текущей программы и делятся на синхронные (по команде int) и асинхронные, называемые исключениями или особыми случаями. Таким образом, исключения — это разновидность прерываний, с помощью которых процессор информирует программу о некоторых особенностях ее реального исполнения. Сопроцессор также обладает способностью возбуждения подобных прерываний при возникновении определенных ситуаций (не обязательно ошибочных). Все возможные исключения сведены к шести типам, каждому из которых соответствует один бит в регистре swr. Программисту совсем не обязательно писать обработчик для реакции на ситуацию, приведшую к некоторому исключению. Сопроцессор умеет самостоятельно реагировать на многие из них. Это так называемая обработка исключений по умолчанию. Для того чтобы «заказать» сопроцессору обработку определенного типа исключения по умолчанию, необходимо это исключение замаскировать. Такое действие выполняется с помощью установки в единицу нужного бита в управляющем регистре сопроцессора cwr (рис. 19.4). Типы исключений, фиксируемые с помощью регистра swr:
– IE (Invalide operation Error) — недействительная операция;
– DE (Denormalized operand Error) — денормализованный операнд;
– ZE (divide by Zero Error) — ошибка деления на нуль;
– ОЕ (Overflow Error) — ошибка переполнения. Возникает в случае выхода порядка числа за максимально допустимый диапазон;
– UE (Underflow Error) — ошибка антипереполнения. Возникает, когда результат слишком мал;
– РЕ (Precision Error) — ошибка точности. Устанавливается, когда сопроцессору приходится округлять результат из-за того, что его точное представление невозможно. Так, сопроцессору (как и читателю) никогда не удастся точно разделить 10 на 3.
При возникновении любого из этих шести типов исключений устанавливается в единицу соответствующий бит в регистре swr, вне зависимости от того, было ли замаскировано это исключение в регистре cwr или нет.
Дата добавления: 2015-04-15; просмотров: 2844;