Астное.8 отдельно отображается ения десятичного с дробью числа, а типовой для него формат вывода может представиться неудобным

Рис. 3.13
Как это всё будет выглядеть на экране, показано на иллюстрации:

8. БлокPULSE  -импульс. Как только на вход блока приходит импульс, блок PULSE на своём выходе формирует короткий импульс, по времени совпадающий или с передним фронтом импульса на входе From OFF to ON (переход с выключенного состояния на включенное), или с задним фронтом входного сигнала (From ON to OFF), или с обоими фронтами. Задание режима выдачи импульсов на выходе – через окно диалога.
-импульс. Как только на вход блока приходит импульс, блок PULSE на своём выходе формирует короткий импульс, по времени совпадающий или с передним фронтом импульса на входе From OFF to ON (переход с выключенного состояния на включенное), или с задним фронтом входного сигнала (From ON to OFF), или с обоими фронтами. Задание режима выдачи импульсов на выходе – через окно диалога.
9. Блок GAIN  -назван как «коэффициент усиления». Этот блок выполняет операции над аналоговым сигналом X в соответствии с уравнением: Y = (A / B) • X + C. В этом уравнении X – выходной сигнал датчика (входной для ПЛК), а Y – это то число, которым измеряемый параметр будет характеризоваться в контроллере с учётом конкретных характеристик объекта управления.
-назван как «коэффициент усиления». Этот блок выполняет операции над аналоговым сигналом X в соответствии с уравнением: Y = (A / B) • X + C. В этом уравнении X – выходной сигнал датчика (входной для ПЛК), а Y – это то число, которым измеряемый параметр будет характеризоваться в контроллере с учётом конкретных характеристик объекта управления.
Необходимость в преобразованиях такого рода возникает очень часто. Это не только приведение сигнала к какому – то уровню путём задаваемого усиления (A / B), но и при согласовании характеристик объекта с применяемым типом датчика.
Пример на использование блока GAIN.Уровень среды в резервуаре (рис.3.14) контролируется датчиком, работающим по принципу эхолота. Пусть он установлен в верхней зоне резервуара, излучает колебания (длину волны излучения не учитываем) в направлении среды и принимает отраженный от границы уровня заполнения сигнал. Время двойного пробега сигналом расстояния между датчиком и границей среды пересчитывается в нормированный выходной сигнал датчика в любом из двух взаимно пересчитываемых форматов: 0 ÷ 20 mA или0 ÷10B.
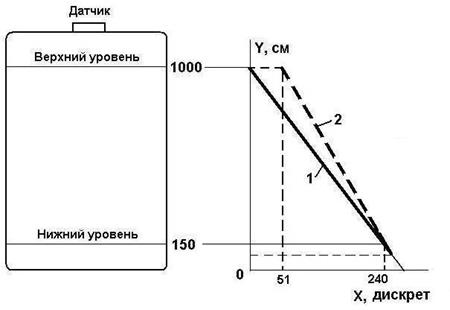
Рис. 3.14
А. При таком методе измерения верхнему уровню среды соответствуют минимальные значения измеренного времени прохождения сигнала и, следовательно, их сигнального представления X, а нижнему – максимальные. Как показано в разделе 1.2.2, аналоговый сигнал, выраженный в вольтах, контроллер переводит в число дискрет. Помня об этом, следует согласовать стандартный диапазон изменения сигнала в вольтах с геометрическими параметрами объекта, и сделать это надо с использованием блока GAIN.
§ При верхнем уровне среды Y = 1000 см, а выходной сигнал датчика X = 0. При этих условиях из уравнения блока Y = (A / B) • X + C найдётся значение C = 1000.
§ Нижнему значению уровня Y = 150 см пусть будут соответствовать 240 дискрет вместо возможных 255. Это выбрано для того, чтобы не приближаться к предельным значениям, которым на рис. 3.14 будет соответствовать более низкий уровень, чем 150 см (штриховая линия). Отсюда: Y = 150 = (A / B) • 240+1000, следовательно, (A / B) = - 3,54.
§ Примем A = - 400, тогда B = 113.
Найденные значения A, B и C вводятся параметрами уравнения блока GAIN в его диалоговом окне.
По полученному уравнению Y = ( - 400 / 113) • X +1000 рассчитаны входные и выходные значения блока GAIN, образующие в совокупности характеристику 1 на рис. 3.14.
В приведённой таблице показано, какие значения сигнала X, полученные с датчика и выраженные в дискретах, контроллер воспринимает как значения конкретных уровней среды (в сантиметрах) в резервуаре с вполне определёнными геометрическими размерными соотношениями.
| X | дискрет | ||||||||||
| Y | уровень |
Похожим способом можно рассчитать требуемые значения коэффициентов уравнения для других диапазонов представления сигналов, для других видов расположения характеристики датчика.
Б. Допустим, что при тех же исходных данных поменялось только одно: датчик имеет диапазон изменения сигнала 4 ÷ 20mA. Как при этом изменятся коэффициенты уравнения?
§ Диапазон 4 ÷ 20 mA легко переводится к виду: 2 ÷ 10B или 51 ÷ 255 дискрет. Как и раньше, вместо 255 взято 240 дискрет.
§ В граничных точках диапазона выполним подстановки: Y = 1000 = (A / B) • 51 + C; Y = 150 = (A / B) • 240 + C. После исключения C определено: (A / B) = - 4,5. Принято: A = - 450, B = 100. Найдено: C= 1230.
По уравнению Y = ( - 450 / 100) • X + 1230 рассчитана характеристика 2 на рис. 3.14.
В. Другим вариантом можно рассмотреть часто применяемое измерение уровня с помощью датчика ёмкостного типа рис.3.15. По мере заполнения резервуара продуктом изменяется электрическая ёмкость «конденсатора», образованного измерительным зондом (стержень, трос, труба и т. д.) и, как в одном из вариантов, металлической стенкой резервуара. Эта ёмкость преобразуется в изменяемую частоту импульсов, которая затем пересчитывается в один из нормированных уровней сигнала (0/4 ÷ 20mA или 0 ÷ 10В) .
В-1. Получим значения коэффициентов настройки блока GAIN для вывода данных на экран, если уровень среды в резервуаре может изменяться от 0 до 30 метров с диапазоном контроля за ним 50см ÷ 30метров (показано на рисунке без скобок). Чтобы не потерять контроль за уровнем жидкости в случае его незначительного превышения отметки 30 метров примем, что значению 3000 см будет соответствовать 240 дискрет из 255 возможных.
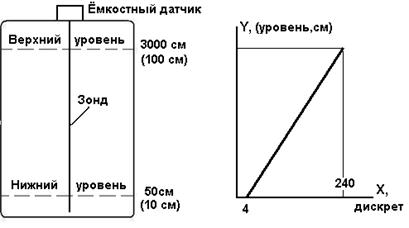
Рис.3. 15
Из пропорции 3000 см ÷ 240 дискрет
Дата добавления: 2015-02-07; просмотров: 2004;