Пьезорезонансные преобразователи
В пьезоэлектрическом резонаторе происходит преобразование электрического напряжения между электродами в деформацию и механические напряжения в пьезоэлементе, которые вызывают ответную реакцию по выходу в виде зарядов на электродах, возникающих под действием механических напряжений. Обратимость пьезоэлектрического эффекта позволяет выполнять пьезорезонатор в виде двухполюсника, объединяющего системы электрического возбуждения механических колебаний и съема электрического сигнала. Резонансные колебания в пьезоэлементе возникают в результате установления в нем стоячих ультразвуковых волн. Длина волны
l = ulf,
где u – скорость распространения ультразвука; f – частота излучения.
Скорость распространения ультразвука в материале определяется формулой:
u=  ,
,
где Еij – константа упругости; r – плотность материала. Следовательно, длина волны
 .
.
Если длина волны l такова, что на отрезке h между гранями, от которых отражаются волны, укладывается целое число полуволн, то в пьезоэлементе устанавливаются стоячие волны. Таким образом, стоячим волнам соответствует частота возбуждающего напряжения
 ,
,
где n – число уложившихся полуволн.
Частота колебаний, при которых на длине h укладывается одна полуволна, является основной частотой и равна
 .
.
При частотах, которые значительно меньше fК, ток в цепи возбуждающих электродов (рис. 2-19, а) мал и определяется в основном межэлектродной емкостью С0 и сопротивлением изоляции между электродами R0.
По мере приближения частоты возбуждающего напряжения к частоте fR амплитуда механических колебаний растет. Пропорционально амплитуде колебаний увеличивается заряд на электродах, и в цепи возрастает составляющая переменного тока, вызываемая деформациями пьезоэлемента.
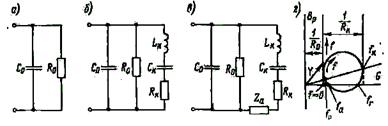
Рис. 2-19
На рис. 2-19, б представлена эквивалентная схема пьезорезонатора. В этой схеме введены эквивалентные параметры: индуктивность LK = mIk2эм, емкость СК = nk2эм и сопротивление RК, образующие динамический контур эквивалентной схемы. Схема рис. 2-19, б соответствует свободно колеблющемуся, т.е. механически не нагруженному, пьезорезонатору (режим короткого замыкания, при котором усилия на поверхностях пьезоэлемента от внешних сил равны нулю). Схема рис. 2-19, в учитывает влияние внешних нагрузок в виде включенного сопротивления Za, которое может иметь как чисто активный (например, если существуют потери на акустическое излучение во внешнюю среду), так и реактивный (например, при присоединении к пьезоэлементу дополнительной массы) характер. В заторможенном состоянии, когда скорости смещений поверхностей пьезоэлемента равны нулю, сопротивление Za равно бесконечности (режим холостого хода). В режиме, близком к холостому ходу, работают пьезоэлектрические датчики давлений и ускорений, в которых используется прямой пьезоэффект. Поэтому в эквивалентной схеме этих датчиков динамическая ветвь обычноне учитывается.
Проводимость эквивалентной схемы (рис. 2-19, б) определяется как
 .
.
Для идеального пьезорезонатора (R0 = ¥, RК = 0) проводимость бесконечно возрастает при условии 1 – w2LKCK = 0, т.е. при частоте wR =  , называемой частотой последовательного резонанса. Эта частота определяется исключительно параметрами введенного динамического контура и поэтому совпадает с определенной ранее как
, называемой частотой последовательного резонанса. Эта частота определяется исключительно параметрами введенного динамического контура и поэтому совпадает с определенной ранее как  – частотой механического резонанса.
– частотой механического резонанса.
Проводимость идеального пьезорезонатора бесконечно падает при условии jwC0+  , при частоте
, при частоте  , называемой частотой параллельного резонанса (а иногда частотой антирезонанса).
, называемой частотой параллельного резонанса (а иногда частотой антирезонанса).
Относительная разность между частотами последовательного и параллельного резонансов составляет (wР – wК)/wК = СК/(2С0). Для пьезорезонаторов из кварца емкостное отношение не превышает СК/С0 = 10-2 – 10-3 и частота wР может быть выше частоты wК не более чем на 0,5%. Соответственно и изменение частоты параллельного резонанса путем подключения параллельно резонатору добавочной емкости С'0 и увеличения таким образом емкости С0 возможно не более чем на 0,1 – 0,01%.
В реальном пьезорезонаторе при частотах wК и wР проводимости контура не равны бесконечности и нулю, они имеют некоторое конечное значение, включающее в себя, кроме активной, и небольшую реактивную составляющую. Поэтому для характеристики пьезорезонатора вводятся еще две частоты, при которых проводимость чисто активная. Одна из этих частот wr называется частотой резонанса и оказывается чуть больше частоты wK, вторая (wa) называется частотой антирезонанса и оказывается чуть ниже частоты wP. Векторная диаграмма проводимости контура с указанием характерных точек показана на рис. 2-19, г.
Важной характеристикой контура является его добротность
Q = wKLK/RK,
определяемая потерями энергии при колебаниях. В состав потерь входят: потери собственно в кварце, потери в материалах электродов, потери на акустическое излучение в окружающую среду, потери на границе колеблющегося элемента и неподвижных элементов крепления, потери во входном элементе присоединяемой электрической схемы. Теоретическая добротность кварцевых резонаторов, если учитывать только потери в кварце, может достигать значения, определяемого из соотношения Qfr = 1,2·1013, реальные добротности зависят от конструкции резонаторов[1].
Основой пьезорезонансного частотного датчика является пьезорезонатор, частота которого изменяется под действием измеряемой величины. Изменение частоты может происходить:
а) при воздействии температуры, которая влияет на геометрические размеры, плотность и, главным образом, на упругие свойства кварца;
б) под действием механических напряжений в резонаторе или его деформации, также вызывающих изменение h, rи n;
в) при присоединении дополнительной массы к резонатору, изменяющей его толщину h и среднюю плотность r.
Соответственно различают термочувствительные, тензочувствительные и массочувствительные пьезорезонаторы. Кроме этого, используются пьезорезонансные датчики с амплитудным выходом. В этих датчиках, работающих на частоте, близкой к резонансной, при изменении акустических потерь меняется амплитуда колебаний.
При построении пьезорезонансного датчика очевидны требования, предъявляемые к пьезорезонатору: высокая добротность, высокая чувствительность к измеряемой величине, малая чувствительность к дестабилизирующим факторам и возможность возбуждения колебаний только на одной частоте, т.е. моночастотность. Эти требования обеспечиваются, в первую очередь, выбором типа среза пьезоэлемента и типа возбуждаемых в пьезоэлементе колебаний. Действительно, если рассмотрим пластину Y-среза, то при приложении поля в направлении оси Y в ней возникают деформации e5 и e6, деформирующие пьезоэлемент в плоскости хz (деформация сдвига вдоль грани) и в плоскости ху (деформация сдвига по толщине). Однако геометрические размеры, определяющие резонансную частоту, в этих случаях различны. Собственная частота колебаний сдвига вдоль грани значительно ниже частоты колебаний сдвига по толщине, и благодаря этому условие моночастотности соблюдается удовлетворительно. В управляемых пьезорезонаторах чаще всего используются именно колебания сдвига по толщине (хотя возможны и другие типы колебаний), так как при этом типе колебаний колебательная энергия концентрируется в подэлектродной области пьезоэлемента. Безэлектродные периферийные области оказываются практически свободными от упругих колебаний, что позволяет осуществлять крепление пьезоэлемента без заметного ухудшения добротностей. Ослабление амплитуды колебаний при r′h′/(rh)=0,02 (r' и h' – плотность и толщина электрода, r и h –плотность и толщина пьезоэлемента) в точке, удаленной от края электрода на 15 h, составляет не менее 40 дБ. При применении линзового резонатора эффект локализации энергии может быть ещё больше.
Дата добавления: 2015-01-26; просмотров: 2088;