Stepper(steps, pin1, pin2, pin3, pin4)
Описание:
Эта функция создает новый класс, который определяет подключение шагового двигателя к платформе Arduino. Поместите ее в начало скетча, до функций setup() и loop(). Число параметров зависит от подключения вашего двигателя к плате - посредством двух или четырех проводов.
Параметры:
steps: Число шагов на один оборот вашего двигателя. Если вам известен угол поворота на один шаг, разделите 360 на этот угол и получите количество шагов на оборот. (int)
pin1, pin2: два провода, подключенные к двигателю (int)
pin3, pin4: опционально: два последних провода, если мотор подключен посредством 4-х проводов (int)
Возвращает:
новый объект класса Stepper.
Пример:
Stepper myStepper = Stepper(100, 5, 6);
Stepper: setSpeed(rpms)
Описание:
Устанавливает частоту вращения шагового двигателя в оборотах в минуту.
Для установки количества шагов используйте функцию step().
Параметры:
rpms: скорость, с которой двигатель должен вращаться в оборотах в минуту - положительное число (long)
Stepper: step(steps)
Описание:
Устанавливает определенное количество шагов мотора, со скоростью, определенную функцией setSpeed(). Эта функция блокиреует работу программы до завершения движения ротора. Например, вы установили скорость 1об/мин и 100 шагов для 100-шагового двигателя. В итоге, функция будет выполняться целую минуту. Для лучшего контроля, устанавливайте большую частоту вращения и двигайтесь на малое количество шагов.
Параметры:
steps: число шагов мотора - положительное число для одного направления, отрицательное - для другого. (int)
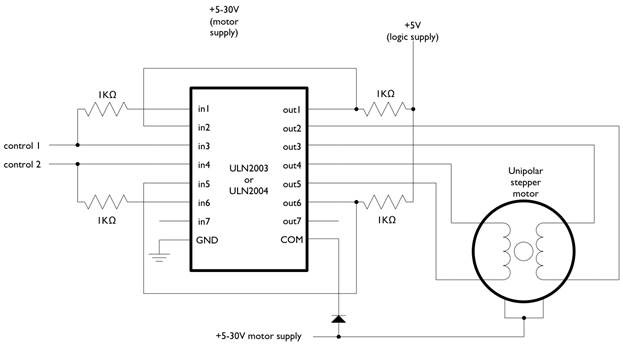
Униполярный 2 провода
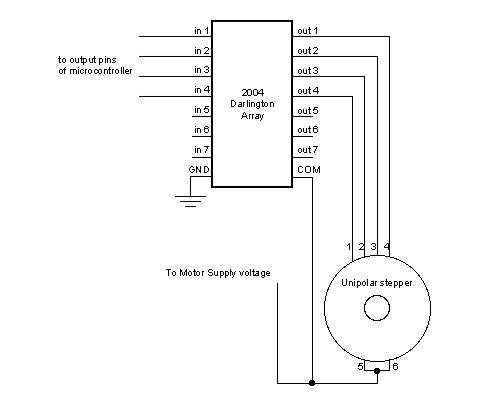
Униполярный 4 провода
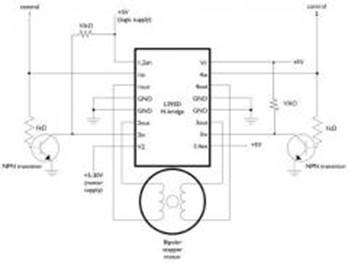
Биполярный 2 провода
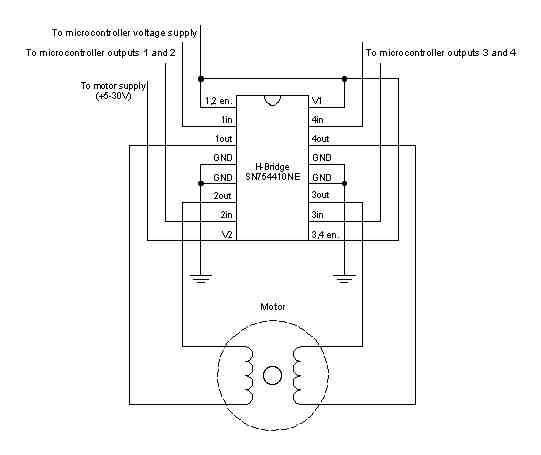
Биполярный 4 провода
Дата добавления: 2015-03-23; просмотров: 1120;