Индуктивные преобразователи
Принцип действия индуктивных преобразователей основан на зависимости индуктивности или взаимной индуктивности обмоток от положения, геометрических размеров и магнитного состояния элементов их магнитной цепи.
Индуктивности и взаимные индуктивности обмоток, расположенных на магнитопроводе, при отсутствии рассеяния магнитного потока определяются формулами (16.4) и (16.5) /14/
 , (16.4)
, (16.4)
 , (16.5)
, (16.5)
где  и
и  - число витков i-й и j-й обмоток;
- число витков i-й и j-й обмоток;
 - магнитное сопротивление,
- магнитное сопротивление,
 - активная составляющая магнитного сопротивления,
- активная составляющая магнитного сопротивления,
lk, Sk,  к - соответственно длина, площадь поперечного сечения и относительная магнитная проницаемость k-го участка магнитопровода;
к - соответственно длина, площадь поперечного сечения и относительная магнитная проницаемость k-го участка магнитопровода;
0 - магнитная проницаемость пустоты;
 - длина воздушного зазора;
- длина воздушного зазора;
S - площадь поперечного сечения воздушного участка магнитопровода;
 - реактивная составляющая магнитного сопротивления;
- реактивная составляющая магнитного сопротивления;
Р - потери в магнитопроводе на частоте  , обусловленные вихревыми токами и гистерезисом;
, обусловленные вихревыми токами и гистерезисом;
Ф - магнитный поток в магнитопроводе.
Из приведенных формул следует, что индуктивность и взаимную индуктивность можно изменять, воздействуя на длину или площадь поперечного сечения воздушного участка магнитной цепи, на магнитную проницаемость или на потери в магнитопроводе.
Некоторые типы индуктивных преобразователей схематически показаны на рисунке 16.4.
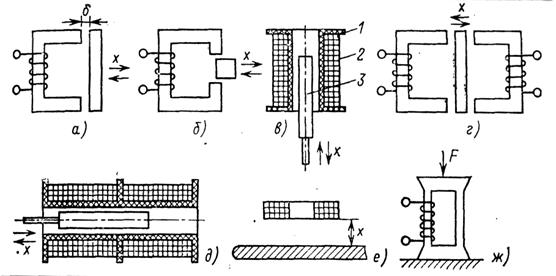
Рисунок 16.4 - Индуктивные преобразователи
Индуктивный преобразователь (рисунок 16.4а) с переменной длиной воздушного зазора б характеризуется нелинейной (близкой к гиперболической) зависимостью L = f ( ). Рабочее перемещение в таких преобразователях составляет 0,01-10 мм. Преобразователь с изменяющейся площадью воздушного зазора приведен на рисунке 16.4б. Такие преобразователи позволяют измерять перемещения до 15-20 мм.
На рисунке 16.4 в изображен преобразователь с разомкнутой магнитной цепью. Он представляет собой обмотку 2, намотанную на пластмассовый каркас 1, внутри которого перемещается сердечник 3 из ферромагнитного материала. Перемещение сердечника вызывает изменение индуктивности катушки. Этот тип преобразователя применяется для измерения перемещений от единиц миллиметров до 100 мм.
Широкое распространение на практике получили дифференциальные преобразователи (рисунок 16.4г и 16.4д), в которых перемещение подвижного элемента вызывает увеличение индуктивности одной обмотки и уменьшение индуктивности другой. На рисунке 16.4е иллюстрируется принцип действия токовихревого преобразователя, в котором изменение индуктивности катушки происходит вследствие изменения расстояния от нее до проводящего тела. При питании катушки переменным током в проводящем теле индуцируют вихревые токи, магнитное поле которых оказывает влияние на катушку. Это влияние обычно оценивают значениями вносимых сопротивлений активного и реактивного. При этом эквивалентная индуктивность катушки уменьшается. Токовихревые преобразователи находят широкое, применение в области бесконтактного контроля линейных размеров и толщины покрытий и обнаружения поверхностных дефектов (трещин, царапин).
Принцип действия магнитоупругих преобразователей (рисунок 16.4ж) основан на изменении магнитной проницаемости  , ферромагнитных тел в зависимости от возникающих в них механических напряжений, обусловленных воздействием механических сил. Изменение магнитной проницаемости
, ферромагнитных тел в зависимости от возникающих в них механических напряжений, обусловленных воздействием механических сил. Изменение магнитной проницаемости  для различных материалов составляет 0,5-3 % при изменении механического напряжения в материале на 1 МПа.
для различных материалов составляет 0,5-3 % при изменении механического напряжения в материале на 1 МПа.
На рисунке 16.5 приведены некоторые типы трансформаторных (взаимоиндуктивных) преобразователей. На рисунке 16.5а показан трансформаторный преобразователь, в котором изменение воздушного зазора вызывает изменение магнитного сопротивления, взаимной индуктивности обмоток, а следовательно, амплитуды переменного напряжения на выходе.
Преобразователь на рисунке 16.5б отличается тем, что имеет дифференциальную конструкцию, и выходные обмотки дуг включены встречно. При нейтральном (симметричном) положении якоря напряжение на выходе равно нулю. Смещение якоря относительно нейтрального положения приводит к появлению выходного напряжения, причем его фаза при переходе через нейтральное положение меняется на 180°.
Преобразователь с распределенными магнитными параметрами (рисунок 16.5 в) предназначен для измерения больших линейных перемещений и состоит из магнитопровода 4 с рабочей частью в виде двух параллельных полос, обмотки возбуждения 1 и подвижной обмотки 2. При перемещении обмотки 2 от положения 3 до положения 5 напряжение на измерительной обмотке 2 возрастает, причем его зависимость от перемещения практически линейна, если магнитное сопротивление участка 3-5 магнитопровода мало по сравнению с магнитным сопротивлением зазора.
Преобразователь на рисунке 16.5г отличается от описанного выше тем, что имеет распределенную измерительную обмотку 2, равномерно намотанную на одном из длинных стержней магнитопровода 4, и подвижный ферромагнитный сердечник 3, шунтирующий магнитный поток. Перемещение магнитного шунта вызывает линейно связанное с ним изменение выходного напряжения.
На рисунке 16.5д показан трансформаторный преобразователь больших перемещений с плоскими обмотками. Он состоит из подвижного магнитопровода 1, имеющего центральный стержень и плоский полюсный наконечник.
На центральном стержне размещена обмотка возбуждения 2. В равномерном зазоре магнитопровода находится прямоугольная неподвижная пластина 3 из изоляционного материала, на поверхность которой путем печатного монтажа нанесена плоская измерительная обмотка 4 в виде двух одинаковых плоских треугольных секций с общей вершиной. Секции измерительной обмотки включены между собой встречно. При перемещении подвижного магнитопровода 1 происходит изменение площади измерительной обмотки, пронизываемой магнитным потоком; соответственно изменяется выходное напряжение. Описанные конструкции трансформаторных преобразователей с распределенными параметрами позволяют легко получить необходимую функциональную зависимость выходного напряжения от перемещения. Это достигается путем профилирования плоской измерительной обмотки для преобразователя (рисунок 16.5д) либо путем профилирования верхнего стержня магнитопровода для преобразователя (рисунок 16.5в).
Еще одним типом индуктивных преобразователей являются магнитомодуляционные преобразователи, действие которых основано на изменении магнитного состояния ферромагнитного материала при одновременном намагничивании в постоянном и переменном полях. Модуляция магнитным потоком возможна за счет нелинейных свойств ферромагнитного материала.
Магнитомодуляционные преобразователи применяются для измерения напряженности постоянного магнитного поля (феррозонды) и перемещений. В последнем случае перемещение объекта вызывает изменение положения постоянного магнита, вследствие чего меняются постоянный магнитный поток в магнитопроводе и магнитная проницаемость ферромагнитного материала. Это в свою очередь вызывает изменение магнитного сопротивления переменному магнитному потоку, создаваемому обмоткой, и соответствующее изменение выходной величины преобразователя.
 |
Рисунок 16.5 - Трансформаторные преобразователи
Вопросы проектирования и использования преобразователей перемещения с распределенными параметрами, функциональных и магнитомодуляционных преобразователей подробно рассмотрены в работах Л. Ф. Куликовского и его учеников М. Ф. Зарипова, Н. Е. Конюхова и др.
Индуктивные преобразователи имеют высокую чувствительность значительную мощность выходного сигнала, что определяет их широкое применение на практике.
Дата добавления: 2015-01-13; просмотров: 1768;