Зависимость момента от скорости, влияние нагрузки
|
|
|
|
|
|
|
|
|


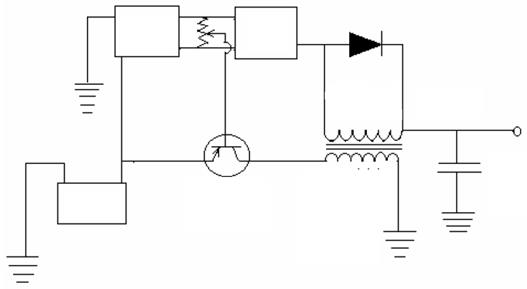
Первичная обмотка трансформатора запитана от аккумулятора и отключается в то же самое время, что и катушка от системы зажигания с высокой энергией искры (HEI). Первичная обмотка несёт ток силой 5 – 10А, который при затухании её электромагнитного поля передаётся на вторичную обмотку. В то же самое время катушка зажигания генерирует всплеск высокого напряжения за счёт затухающего напряжения в её первичной обмотке. Так как вторичная обмотка трансформатора закорочена высоковольтным проводом, она не вмешивается в наведённый ток первичной обмотки. Поэтому высокое напряжение и ток трансформатору суммируются, создавая гораздо более горячую искру. R = 1 МОм.
|
|
|
|
|
|
|
| | | | | | | | | | | | | |
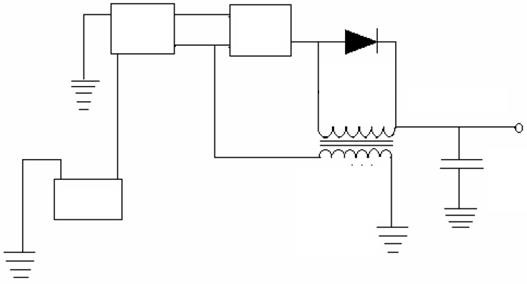
Вариант 3: Переключающий транзистор удалён из схемы и ток подаётся из цепи электронного зажигания (микропроцессорного блока управления зажиганием) и направляется непосредственно на катушку зажигания и трансформатор. Это упрощает схему, но вероятно может вдвое уменьшить общее количество энергии, направляемой на катушку и трансформатор. Последствия потребления дополнительной энергии со стороны микропроцессорного блока управления для электропитания катушки и трансформатора неизвестны. Существует опасность перегрева цепей микропроцессорного блока с последующим выходом его из строя.
Так как вторичная обмотка трансформатора закорочена проводом высокого напряжения, то ток высокого напряжения через эту обмотку не проходит, в то время как по ней проходит наведённый ток большой силы, возникающий под действием затухающего магнитного поля первичной обмотки. Очень важно не заземлять высокое напряжение и не закорачивать массу на вторичную обмотку, чтобы не спались всё электрооборудование автомобиля. Также следует иметь в виду, что предлагаемая схема точно также опасна, как конденсатор высокого напряжения от телевизора или от микроволновой печи и фактически ещё более опасна. Высокое напряжения + большая сила тока НЕПРЕМЕННО УБЬЮТ вас, если вы вдруг дотронетесь до провода распределителя, свечи или голой вторичной обмотки при работающем двигателе. То же самое касается конденсатора, даже если двигатель не работает!!
Некоторые отметили, что мои диоды направлены не туда. Они направлены так, чтобы обеспечить течение тока туда, куда я хочу, пусть даже автопроизводители придерживаются другой конвенции, которая не обязательна имеет смысл.Я понимаю это так, что ток течёт с минуса на плюс (землю) и что всё электричество имеет ОТРИЦАТЕЛЬНЫЙ заряд. Перед установкой диодов просто проверьте, пропускают ли они ток в ту сторону, куда вы хотите.
Milton:
Полярности диодов, показанных на схеме s1r9a9m9, рассказывают нам байки. В нескольких постингах он указывает на то, что родная электропроводка автомобиля осталась нетронутой. Это означает, что полярность высокого напряжения с катушки зажигания -ve. Он также заявляет, что высокое напряжение, похоже, заземлено в блоке реле, хотя сам блок реле изолирован от шасси.
Итак, если высокое напряжение мгновенно возбуждает обмотки реле в то время как реле даёт импульс (искру), то памятуя о том, что обмотка реле представляет собой катушку индуктивности с железным сердечником, куда уходит обратная ЭДС (импульс +ve), созданная затухающим магнитным полем обмоток реле? Через диоды для ионизации среды в искровом промежутке свечи (полярность противоположна традиционной автомобильной теории – да и шут с ним – система всё равно не работает как традиционная).
Когда обмотки реле не находятся в возбуждённом состоянии (от подаваемого напряжении свечи), якоря контактных групп, показанные снизу обмоток, подсоединяют инвертор к свече и в то же самое время на свечу направляется обратная ЭДС (заряженный +ve). Сбивает с толку то, как подсоединены контакты, и то, как возбуждаются обмотки реле и работают контактные группы.
В принципе, то, чего достиг s1r9a9m9, это перенесение результатов его опытов со взрывом воды в ведре (под действием напряжения 110В) на автомобильный цилиндр с использованием пускового импульса (синхронизированной по времени искры). Ионизирующее напряжение обратной ЭДС явилось, вероятно, лишь только бонусом, заставившим всю систему работать. Либо произошло именно это, либо синхронизация искры немного сложнее, чем он нам говорит. Глядя на то, как он разместил диоды вокруг своего реле, я считаю, что вернó последнее утверждение.
Проблемой всё ещё остаётся найти реле, которое давало бы достаточную обратную ЭДС, и инвертор, чтобы заставить этот упрямый двигатель работать.
Большинство современных шаговых двигателей являются гибридными. По сути гибридный двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. По способу управления такие двигатели одинаковы, дальше будут рассматриваться только такие двигатели. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3.6 грд или 1.8 грд. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 7а).
Рис. 7. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Биполярный или униполярный?
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Это важно, если драйверы выполнены на дискретных компонентах. В настоящее время существуют специализированные микросхемы драйверов для биполярных двигателей, с использованием которых драйвер получается не сложнее, чем для униполярного двигателя. Например, это микросхемы L293E, L298N или L6202 фирмы SGS-Thomson, PBL3770, PBL3774 фирмы Ericsson, NJM3717, NJM3770, NJM3774 фирмы JRC, A3957 фирмы Allegro, LMD18T245 фирмы National Semiconductor
3. Способы управления ШД.
Существует несколько способов управления фазами шагового двигателя.
полношаговый (попеременная коммутация),
полношаговый(попарная коммутация),
полушаговый режим,
микрошаговое управление (с дроблением шага)
Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис 8а). Этот способ называют ”one phase on” full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.
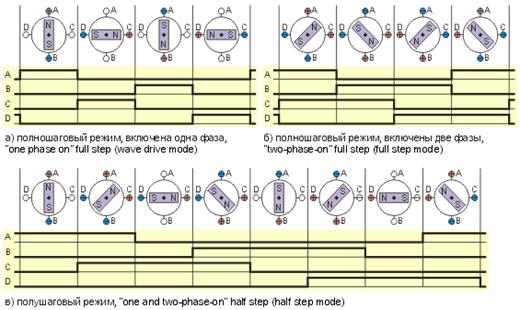
Рис. 8. Различные способы управления фазами шагового двигателя.
Второй способ - управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют ”two-phase-on” full step или просто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 8б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на пол-шага.
Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 8в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Еще один способ управления называется микрошаговым режимом или micro stepping mode. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги. Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Нужно отметить, что эти положения ротор принимает при работе двигателя, но положение ротора не может сохраняться неизменным после выключения тока обмоток. Поэтому при включении и выключении питания двигателя ротор будет смещаться на пол-шага. Для того, чтобы он не смещался при остановке, необходимо подавать в обмотки ток удержания. То же справедливо и для полушагового и микрошагового режимов. Следует отметить, что если в выключенном состоянии ротор двигателя поворачивался, то при включении питания возможно смещение ротора и на большую, чем половина шага величину.
Ток удержания может быть меньше номинального, так как от двигателя с неподвижным ротором обычно не требуется большого момента. Однако есть применения, когда в остановленном состоянии двигатель должен обеспечивать полный момент, что для шагового двигателя возможно. Это свойство шагового двигателя позволяет в таких ситуациях обходиться без механических тормозных систем. Поскольку современные драйверы позволяют регулировать ток питания обмоток двигателя, задание необходимого тока удержания обычно не представляет проблем. Задача обычно заключается просто в соответствующей программной поддержке для управляющего микроконтроллера.
Режимы работы, параметры и характеристики ШД.
Основным принципом работы шагового двигателя является создание вращающегося магнитного поля, которое заставляет ротор поворачиваться. Вращающееся магнитное поля создается статором, обмотки которого соответствующим образом запитываются устройством управления (драйвером) в определенной последовательности. В зависимости от скорости вращения поля (частоты управляющих импульсов) различают следующие режимы работы:
Статический
Стационарный (режим непрерывного частотного управления)
Переходные режимы (приемистости, мгновенной остановки, реверса, частотного разгона)
Статический режим.
Для двигателя, у которого запитана одна обмотка, зависимость момента от угла поворота ротора относительно точки равновесия является приблизительно синусоидальной. Эта зависимость для двухобмоточного двигателя, который имеет N шагов на оборот (угол шага в радианах S = (2*pi)/N), показана на рис. .
Рис. . Зависимость момента от угла поворота ротора для одной запитанной обмотки.
Реально характер зависимости может быть несколько другой, что объясняется неидеальностью геометрии ротора и статора. Пиковое значение момента называется моментом удержания. Формула, описывающая зависимость момента от угла поворота ротора, имеет следующий вид:
T = - Th*sin((pi/2)/S)*Ф),
где T – момент, Th – момент удержания,
S – угол шага,
Ф – угол поворота ротора.
Если к ротору приложить внешний момент, который превышает момент удержания, ротор провернется. Если внешний момент не превышает момента удержания, то ротор будет находиться в равновесии в пределах угла шага. Нужно отметить, что у обесточенного двигателя момент удержания не равен нулю вследствие действия постоянных магнитов ротора. Этот момент обычно составляет около 10% максимального момента, обеспечиваемого двигателем.
Иногда используют термины «механический угол поворота ротора» и «электрический угол поворота ротора». Механический угол вычисляется исходя из того, что полный оборот ротора составляет 2*pi радиан. При вычислении электрического угла принимается, что один оборот соответствует одному периоду угловой зависимости момента. Для приведенных выше формул Ф является механическим углом поворота ротора, а электрический угол для двигателя, имеющего 4 шага на периоде кривой момента, равен ((pi/2)/S)*Ф или (N/4)*Ф, где N – число шагов на оборот. Электрический угол фактически определяет угол поворота магнитного поля статора и позволяет строить теорию независимо от числа шагов на оборот для конкретного двигателя.
Если запитать одновременно две обмотки двигателя, то момент будет равен сумме моментов, обеспечиваемых обмотками по отдельности (рис. ).
Рис. 10. Зависимость момента от угла поворота ротора для двух запитанных обмоток.
При этом, если токи в обмотках одинаковы, то точка максимума момента будет смещена на половину шага. На половину шага сместится и точка равновесия ротора (точка e на рисунке). Этот факт и положен в основу реализации полушагового режима. Пиковое значение момента (момент удержания) при этом будет в корень из двух раз больше, чем при одной запитанной обмотке.
Th2 = 2 0.5*Th1,
где Th2 – момент удержания при двух запитанных обмотках,
Th1 – момент удержания при одной запитанной обмотке.
Именно этот момент обычно и указывается в характеристиках шагового двигателя(называемый статический синхронизирующий момент в паспортных данных)
Стационарный (режим непрерывного частотного управления)
При последовательном переключении статорных обмоток на источник питания магнитное поля упорядоченно перемещается в зазоре двигателя. Величина и направление магнитного поля показаны на векторной диаграмме (рис. 1).
Рис. 11. Величина и направление магнитного поля для разных режимов питания фаз.
Оси X и Y совпадают с направлением магнитного поля, создаваемого обмотками первой и второй фазы двигателя. Когда двигатель работает с одной включенной фазой, ротор может занимать положения 1, 3, 5, 7. Если включены две фазы, то ротор может занимать положения 2, 4, 6, 8. К тому же, в этом режиме больше момент, так как он пропорционален длине вектора на рисунке. Оба эти метода управления обеспечивают полный шаг, но положения равновесия ротора смещены на пол-шага. Если скомбинировать два этих метода и подать на обмотки соответствующие последовательности импульсов, то можно заставить ротор последовательно занимать положения 1, 2, 3, 4, 5, 6, 7, 8, что соответствует половинному шагу.
По сравнению с полношаговым режимом, полушаговый режим имеет следующие преимущества:
более высокая разрешающая способность без применения более дорогих двигателей
меньшие проблемы с явлением резонанса. Резонанс приводит лишь к частичной потере момента, что обычно не мешает нормальной работе привода.
Недостатком полушагового режима является довольно значительное колебание момента от шага к шагу. В тех положениях ротора, когда запитана одна фаза, момент составляет примерно 70% от полного, когда запитаны две фазы. Эти колебания могут явиться причиной повышенных вибраций и шума, хотя они всё равно остаются меньшими, чем в полношаговом режиме.
Способом устранения колебаний момента является поднятие момента в положениях с одной включенной фазой и обеспечение таким образом одинакового момента во всех положениях ротора. Это может быть достигнуто путем увеличения тока в этих положениях до уровня примерно 141% от номинального. Некоторые драйверы, такие как PBL 3717/2 и PBL 3770A фирмы Ericsson, имеют логические входы для изменения величины тока. Нужно отметить, что величина 141% является теоретической, поэтому в приложениях, требующих высокой точности поддержания момента эта величина должна быть подобрана экспериментально для конкретной скорости и конкретного двигателя. Поскольку ток поднимается только в те моменты, когда включена одна фаза, рассеиваемая мощность равна мощности в полношаговом режиме при токе 100% от номинального. Однако такое увеличение тока требует более высокого напряжения питания, что не всегда возможно. Есть и другой подход. Для устранения колебаний момента при работе двигателя в полушаговом режиме можно снижать ток в те моменты, когда включены две фазы. Для получения постоянного момента этот ток должен составлять 70.7% от номинального. Таким образом реализует полушаговый режим, например, микросхема драйвера A3955 фирмы Allegro.
Для полушагового режима очень важным является переход в состояние с одной выключенной фазой. Чтобы заставить ротор принять соответствующее положение, ток в отключенной фазе должен быть уменьшен до нуля как можно быстрее. Длительность спада тока зависит от напряжения на обмотке в то время, когда она теряет свою запасенную энергию. Замыкая в это время обмотку на источник питания, который представляет максимальное напряжение, имеющееся в системе, обеспечивается максимально быстрый спад тока. Для получения быстрого спада тока при питании обмоток двигателя H-мостом все транзисторы должны закрываться, при этом обмотка через диоды оказывается подключенной к источнику питания. Скорость спада тока значительно уменьшится, если один транзистор моста оставить открытым и закоротить обмотку на транзистор и диод. Для увеличения скорости спада тока при управлении униполярными двигателями подавление выбросов ЭДС самоиндукции предпочтительнее осуществлять не диодами, а варисторами или комбинацией диодов и стабилитрона, которые ограничат выброс на большем, но безопасном для транзисторов уровне.
На практике в стационарном режиме при осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг положения равновесия. Время установления зависит от характеристик нагрузки и от схемы драйвера. Во многих приложениях такие колебания являются нежелательными. Избавиться от этого явления можно путем использования микрошагового режима. На рис. показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/32 и даже меньше. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
Рис. 12. Зависимость момента от угла поворота ротора в случае разных значений тока фаз.
Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.
Если одновременно запитаны две обмотки двигателя, но токи в этих обмотках не равны (рис. 12), то результирующий момент будет
Th = ( a2 + b2 )0.5,
а точка равновесия ротора сместится в точку
x = ( S / (pi/2) ) arctan( b / a ),
где a и b – момент, создаваемый первой и второй фазой соответственно,
Th – результирующий момент удержания,
x – положение равновесия ротора в радианах,
S – угол шага в радианах.
Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима.
Ещё раз нужно отметить, что приведенные выше формулы верны только в том случае, если зависимость момента от угла поворота ротора синусоидальная и если ни одна часть магнитной цепи двигателя не насыщается.
В пределе, шаговый двигатель может работать как синхронный электродвигатель в режиме непрерывного вращения. Для этого токи его фаз должны быть синусоидальными, сдвинутыми друг относительно друга на 90 град.
Результатом использования микрошагового режима является намного более плавное вращение ротора на низких частотах. На частотах в 2 – 3 раза выше собственной резонансной частоты ротора и нагрузки, микрошаговый режим дает незначительные преимущества по сравнению с полу- или полношаговым режимами. Причиной этого является фильтрующее действие инерции ротора и нагрузки. Система с шаговым двигателем работает подобно фильтру нижних частот. В микрошаговом режиме можно осуществлять только разгон и торможение, а основное время работать в полношаговом режиме. К тому же, для достижения высоких скоростей в микрошаговом режиме требуется очень высокая частота повторения микрошагов, которую не всегда может обеспечить управляющий микроконтроллер. Для предотвращения переходных процессов и потери шагов, переключения режимов работы двигателя (из микрошагового режима в полношаговый и т.п.) необходимо производить в те моменты, когда ротор находится в положении, соответствующем одной включенной фазе. Некоторые микросхемы драйверов микрошагового режима имеют специальный сигнал, который информирует о таком положении ротора. Например, это драйвер A3955 фирмы Allegro.
Иногда микрошаговый режим используется для увеличения точности величины шага сверх заявленной производителем двигателя. При этом используется номинальное число шагов. Для повышения точности используется коррекция положения ротора в точках равновесия. Для этого сначала снимают характеристику для конкретного двигателя, а затем, изменяя соотношение токов в фазах, корректируют положение ротора индивидуально для каждого шага. Такой метод требует предварительной калибровки и дополнительных ресурсов управляющего микроконтроллера. Кроме того, требуется датчик начального положения ротора для синхронизации его положения с таблицей корректирующих коэффициентов.
На практике в стационарном режиме при осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг положения равновесия. Время установления зависит от характеристик нагрузки и от схемы драйвера. Во многих приложениях такие колебания являются нежелательными. Избавиться от этого явления можно путем использования микрошагового режима. На рис. 13 показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
Рис. 13. Перемещения ротора в полношаговом и микрошаговом режимах.
Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз. На практике существуют некоторые факторы, ограничивающие точность работы привода в микрошаговом режиме. Некоторые из них относятся к драйверу, а некоторые непосредственно к двигателю.
Обычно производители шаговых двигателей указывают такой параметр, как точность шага. Точность шага указывается для положений равновесия ротора при двух включенных фазах, токи которых равны. Это соответствует полношаговому режиму с перекрытием фаз. Для микрошагового режима, когда токи фаз не равны, никаких данных обычно не приводится.
Идеальный шаговый двигатель при питании фаз синусоидальным и косинусоидальным током должен вращаться с постоянной скоростью. У реального двигателя в таком режиме будут наблюдаться некоторые колебания скорости. Связано это с нестабильностью воздушного зазора между полюсами ротора и статора, наличием магнитного гистерезиса, что приводит к погрешностям величины и направления магнитного поля и т.д. Поэтому положения равновесия и момент имеют некоторые отклонения. Эти отклонения зависят от погрешности формы зубцов ротора и статора и от примененного материала магнитопроводов.
Конструкция некоторых двигателей оптимизирована для наилучшей точности в полношаговом режиме и максимального момента удержания. Специальная форма зубцов ротора и статора спроектирована так, чтобы в положении равновесия для полношагового режима магнитный поток сильно возрастал. Это приводит к ухудшению точности в микрошаговом режиме. Лучшие результаты позволяют получить двигатели, у которых момент удержания в обесточенном состоянии меньше.
Отклонения можно разделить на два вида: отклонения величины магнитного поля, которые приводят к отклонениям момента удержания в микрошаговом режиме и отклонения направления магнитного поля, которые приводят к отклонениям положения равновесия. Отклонения момента удержания в микрошаговом режиме обычно составляют 10 – 30% от максимального момента. Нужно сказать, что и в полношаговом режиме момент удержания может колебаться на 10 – 20 % вследствие искажений геометрии ротора и статора.
Если измерить положения равновесия ротора при вращении двигателя по и против часовой стрелки, то получатся несколько разные результаты. Этот гистерезис связан в первую очередь с магнитным гистерезисом материала сердечника, хотя свой вклад вносит и трение. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. Погрешность, создаваемая гистерезисом может быть равна нескольким микрошагам. Поэтому в высокоточных приложениях при движении в одном из направлений нужно проходить за желаемую позицию, а затем возвращаться назад, чтобы подход к нужной позиции всегда осуществлялся в одном направлении.
Вполне естественно, что любое желаемое увеличение разрешающей способности наталкивается на какие-то физические ограничения. Не стоит думать, что точность позиционирования для 7.2 град. двигателя в микрошаговом режиме не уступает точности 1.8 град. двигателя.
Препятствием являются следующие физические ограничения:
- нарастание момента в зависимости от угла поворота у 7.2 градусного двигателя в четыре раза более пологое, чем у настоящего 1.8-градусного двигателя. Вследствие действия момента трения или момента инерции нагрузки точность позиционирования уже будет хуже;
- как будет показано ниже, если в системе есть трение, то вследствие появления мертвых зон точность позиционирования будет ограничена
- большинство коммерческих двигателей не обладают прецизионной конструкцией и зависимость между моментом и углом поворота ротора не является в точности синусоидальной. Вследствие этого зависимость между фазой синусоидального тока питания и углом поворота вала будет нелинейной. В результате ротор двигателя будет точно проходить положения каждого шага и полушага, а между этими положениями будут наблюдаться довольно значительные отклонения.
Эти проблемы наиболее ярко выражены для двигателей с большим количеством полюсов. Существуют однако двигатели, ещё на этапе разработки оптимизированные для работы в микрошаговом режиме. Полюса ротора и статора таких двигателей менее выражены благодаря скошенной форме зубцов.
Еще один источник погрешностей позиционирования – это ошибка квантования ЦАП, с помощью которого формируются токи фаз. Дело в том, что ток должен формироваться по синусоидальному закону, поэтому для минимизации погрешности линейный ЦАП должен иметь повышенную разрядность. Существуют специализированные драйверы со встроенным нелинейным ЦАПом, который позволяет сразу получать осчеты функции sin. Примером может служить драйвер A3955 фирмы Allegro, который имеет встроенный 3-х разрядный ЦАП, который обеспечивает следующие значения тока фаз: 100%, 92.4%, 83.1%, 70.7%, 55.5%, 38.2%, 19.5%, 0%. Это позволяет работать в микрошаговом режиме с величиной шага 1/8, при этом погрешность установки тока фаз не превышает 2%. Кроме того, этот драйвер имеет возможность управлять скоростью спада тока обмоток двигателя во время работы, что позволяет произвести «тонкую подстройку» драйвера под конкретный двигатель для получения наименьшей погрешности позиционирования.
Даже если ЦАП точно сформировал синусоидальное опорное напряжение, его нужно усилить и превратить в синусоидальный ток обмоток. Многие драйверы имеют значительную нелинейность вблизи нулевого значения тока, что вызывает значительные искажения формы и, как следствие, значительные ошибки позиционирования. Если используются высококачественные драйверы, например PBM3960 и PBL3771 фирмы Ericsson, погрешность, связанная с драйвером исчезающе мала по сравнению с погрешностью двигателя.
Иногда контроллеры шаговых двигателей позволяют корректировать форму выходного сигнала путем добавления или вычитания из синуса его третьей гармоники. Однако такая подстройка должна производится индивидуально под конкретный двигатель, характеристики которого должны быть перед этим измерены.
Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения (особенно на очень низких скоростях), для устранения шума и явления резонанса. Микрошаговый режим также способен уменьшить время установления механической системы, так как в отличие от полношагового режима отсутствуют выбросы и осцилляции.Однако в большинстве случаев для обычных двигателей нельзя гарантировать точного позицианирования в микрошаговом режиме.
Синусоидальный ток фаз может быть обеспечен применением специальных драйверов. Некоторые из них, например A3955, A3957 фирмы Allegro, уже содержат ЦАП и требуют о микроконтроллера только цифровых кодов. Другие же, такие как L6506, L298 фирмы SGS-Thomson, требуют внешних опорных напряжений синусоидальной формы, которые должен формировать микроконтроллер с помощью ЦАПов. Нужно сказать, что слишком большое количество дискретов синуса не приводит к повышению точности позиционирования, так как начинает доминировать ошибка, связанная с неидеальностью геометрии полюсов двигателя. Тем более, в этом случае отсчеты должны следовать с большой частотой, что является проблемой при их программном формировании. При работе на больших скоростях разрешающую способность ЦАПов можно уменьшить. Более того, при очень больших скоростях вообще рекомендуется работать в обычном полношаговом режиме, так как управление гармоническим сигналом теряет преимущества. Происходит это по той причине, что обмотки двигателя представляют собой индуктивность, соответственно любая конкретная схема драйвера с конкретным напряжением питания обеспечивает вполне определенную максимальную скорость нарастания тока. Поэтому при повышении частоты форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной.
Зависимость момента от скорости, влияние нагрузки
Момент, создаваемый шаговым двигателем, зависит от нескольких факторов:
- скорости
- тока в обмотках
- схемы драйвера
На рис. 14а показана зависимость момента от угла поворота ротора.
Рис. 14. Возникновение мертвых зон в результате действия трения.
У идеального шагового двигателя эта зависимость синусоидальная. Точки S являются положениями равновесия ротора для негруженного двигателя и соответствуют нескольким последовательным шагам. Если к валу двигателя приложить внешний момент, меньший момента удержания, то угловое положение ротора изменится на некоторый угол Ф.
Ф = (N/(2*pi))*sin(Ta/Th),
где Ф – угловое смещение,
N – количество шагов двигателя на оборот,
Ta – внешний приложенный момент,
Th – момент удержания.
Угловое смещение Ф является ошибкой позиционирования нагруженного двигателя. Если к валу двигателя приложить момент, превышающий момент удержания, то под действием этого момента вал провернется. В таком режиме положение ротора является неконтролируемым. На практике всегда имеется приложенный к двигателю внешний момент, хотя бы потому, что двигателю приходится преодолевать трение. Силы трения могут быть расделены на две категории: статическое трение или трение покоя, для преодоления которого требуется постоянный момент и динамическое трение или вязкое трение, которое зависит от скорости. Рассмотрим статическое трение. Предположим, что для его преодоления требуется момент в половину от пикового. На рис. 14а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент, лежащий на графике за пределами штриховых линий. Отсюда следуют два вывода: трение снижает момент на валу двигателя и появляются мертвые зоны вокруг каждого положения равновесия ротора (рис. 14б):
d = 2 ( S / (pi/2) ) arcsin(T f /T h) = ( S / (pi/4) ) arcsin(T f / Th),
где d – ширина мертвой зоны в радианах,
S – угол шага в радианах,
Tf – момент трения,
Th – момент удержания.
Мертвые зоны ограничивают точность позиционирования. Например, наличие статического трения в половину от пикового момента двигателя с шагом 90 град. вызовет наличие мертвых зон в 60 град. Это означает, что шаг двигателя может колебаться от 30 до 150 град., в зависимости от того, в какой точке мертвой зоны остановится ротор после очередного шага.
Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием микрошагов очень важно минимизировать трение покоя.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это весьма приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный момент имеет в место, когда ротор находится ровно между соседними положениями равновесия (рис. 15).
Рис. 15. Момент удержания и рабочий момент шагового двигателя.
Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. При синусоидальной зависимости момента от угла поворота ротора, этот момент Tr = Th/(20.5). Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки.
Параметры привода на основе шагового двигателя сильно зависят от характеристик нагрузки. Кроме трения, реальная нагрузка обладает инерцией. Инерция препятствует изменению скорости. Инерционная нагрузка требует от двигателя больших моментов на разгоне и торможении, ограничивая таким образом максимальное ускорение. С другой стороны, увеличение инерционности нагрузки увеличивает стабильность скорости.
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 16а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 16б).
Рис. 16. Форма тока в обмотках двигателя на разных скоростях работы.
Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем для их питания.
Поведение момента при увеличении частоты коммутации фаз примерно таково: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости (рис. 17).
Рис. 17. Зависимость момента от скорости.
Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность нагрузки сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой. Эта область называется областью старта. Внешняя кривая (кривая разгона, или pull-out curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. При измерении максимальной скорости нужно иметь в виду, что из-за явления резонанса момент равен нулю еще и на резонансной частоте. Область, которая лежит между кривыми, называется областью разгона.
Нужно отметить, что схема драйвера в значительной степени влияет на ход кривой момент-скорость, но этот вопрос будет рассмотрен ниже.
Дата добавления: 2014-12-30; просмотров: 2051;