Кинематический анализ зубчатых механизмов.
1. ОСНОВНЫЕ СВЕДЕНИЯ
Зубчатые механизмы служат для передачи вращательного движения от одного вала к другому, для изменения величины и направления угловой скорости и крутящего момента.
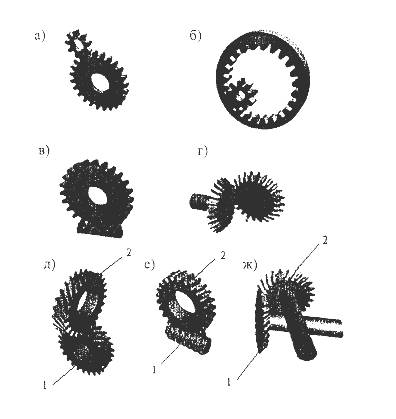
Рисунок 1
Если скорость вращения ведомого вала меньше скорости вращения ведущего, то такой механизм называется редуктором. Редуктор может быть обращен в ускоритель (мультипликатор), если в нем ведущий вал сделать ведомым.
В зависимости от расположения осей колес зубчатые передачи могут быть с параллельными осями (цилиндрические) (рис. 1 а, б), с пересекающими осями (конические) (рис. 1, г) и со скрещивающимися осями или гиперболоидные передачи, вариантами которых являются винтовые ( рис. 1, д), червячные ( рис. 1, е) и гипоидные ( рис. 1, ж) передачи. В винтовой передаче звенья 1, 2 – косозубые цилиндрические колёса; в червячной передаче звено 1 – червяк, 2 – червячное колесо; в гипоидной передаче звенья 1,2 – конические колеса.
По относительному расположению валов различают плоские и пространственные зубчатые передачи. В плоских механизмах оси вращения звеньев параллельны, и все звенья вращаются в параллельных плоскостях. В этом случае переда вращения осуществляется с помощью круглых цилиндрических колес. В пространственных передачах оси вращения звеньев пересекаются (конические передачи) или скрещиваются (червячные, винтовые, спироидные и гипоидные передачи).
2. ПЕРЕДАТОЧНОЕ ОНОШЕНИЕ
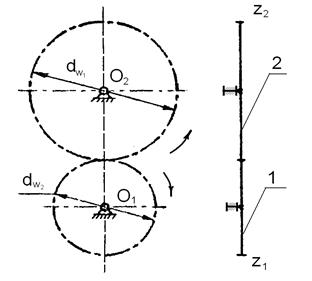
а) Внешнее зацепление б) Внутреннее зацепление
Отношение угловой скорости ведущего вала j к угловой скорости ведомого вала k называется передаточным отношением и обозначается буквой «i» с соответствующими индексами:
 ;
;  (1)
(1)
Для механизма изображенного на рисунке 2
 (2)
(2)
Знак плюс относится к внутреннему зацеплению (рис. 1, б), а знак минус к внешнему (рис. 1, а).
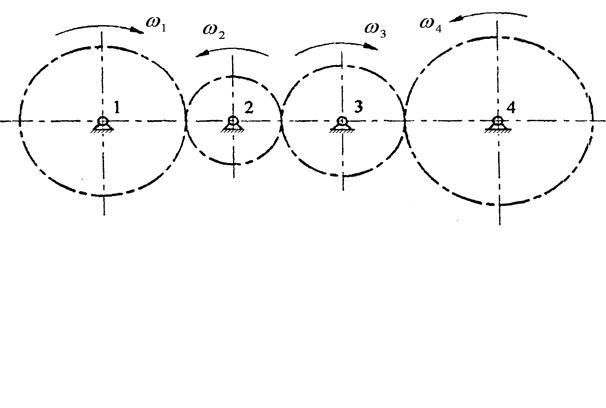
3. РЯДОВЫЕ ЗУБЧАТЫЕ МЕХАНИЗМЫ
Зубчатые механизмы с неподвижными относительно стойки осями колес делятся на рядовые и ступенчатые. В рядовых механизмах (рис. 3) на каждой оси насаженно по одному колесу. Для него:
 ,
,
или  , (3)
, (3)
Где t – число передач внешнего зацепления.
4. СТУПЕНЧАТЫЕ ЗУБЧАТЫЕ МЕХАНИЗМЫ
Для получения больших передаточных отношений используют более сложные многоступенчатые зубчатые механизмы.
Ступенью зубчатого механизма называется передача вращательного движения между двумя звеньями, расположенных на ближайших геометрических неподвижных осях. Число ступеней в зубчатых механизмах равно числу неподвижных осей без единицы.
Ступени бывают простые и планетарные. На рис. 4 А и С – простые, В – планетарная ступени.
В многоступенчатом редукторе полное передаточное отношение равно отношению передаточных отношений ступеней, входящих в редуктор. Для схемы редуктора на рис. 4 полное передаточное отношение
 (4)
(4)
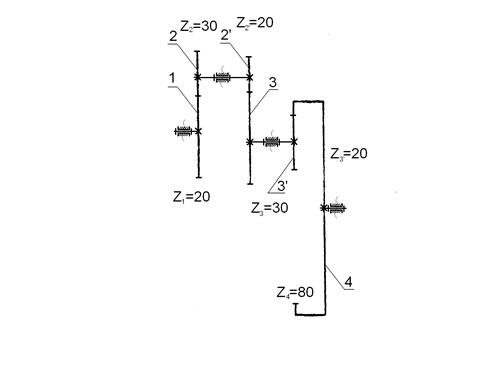
В ступенчатых механизмах на каждой оси, кроме ведущей и ведомой, насаженно по два колеса. На рис. 5 приведена схема трехступенчатого механизма. Для него

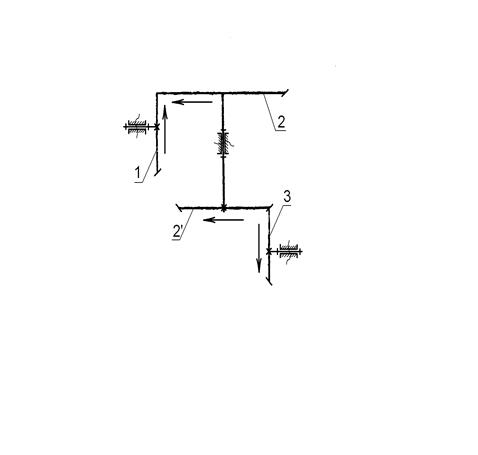
При передачи вращения коническими колесами знак передаточного отношения определяется правилом стрелок (рис. 6). Если стрелки на ведущим и ведомом колесах, расположены на параллельных валах, направлены в одну сторону, то передаточное отношение будет со знаком плюс, если в противоположные стороны, то со знаком минус. Для механизма изображенного на рис.6
 .
.
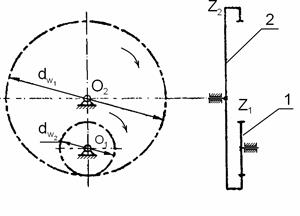
5. САТЕЛЛИТНЫЕ МЕХАНИЗМЫ
 Зубчатые механизмы, имеющие колеса, оси которых перемещаются в пространстве, называются сателлитными (рис. 7, а, б). Колеса 1 и 3 (рис.7, а), вращается вокруг неподвижной центральной оси, называются центральными, а колесо2, ось которого перемещается в пространстве, называется сателлитом. Звено Н, в котором закреплена ось сателлита 2, называется водилом.
Зубчатые механизмы, имеющие колеса, оси которых перемещаются в пространстве, называются сателлитными (рис. 7, а, б). Колеса 1 и 3 (рис.7, а), вращается вокруг неподвижной центральной оси, называются центральными, а колесо2, ось которого перемещается в пространстве, называется сателлитом. Звено Н, в котором закреплена ось сателлита 2, называется водилом.
Сателлитные механизмы с двумя и более степенями свободы называются дифференциальными (рис. 7, а), а с одной степенью свободы планетарными (рис. 7, б).
Зависимость между угловыми скоростями звеньев может быть определенна при помощи метода обращения движения. Суть его заключается в том, что всем звеньям механизма сообщается дополнительное вращение с угловой скоростью, равной по величине угловой скорости вращению водила, но противоположной по направлению  . При этом водило мысленно останавливается и механизм превращается в обращенный, в котором оси всех колес неподвижны. Новые угловые скорости звеньев в обращенном движении равны
. При этом водило мысленно останавливается и механизм превращается в обращенный, в котором оси всех колес неподвижны. Новые угловые скорости звеньев в обращенном движении равны  (рис. 7, а).
(рис. 7, а).
Передаточное отношение от первого звена к третьему между центральными колесами для обнаженного механизма имеет вид
 (5)
(5)
Формула (5) называется формулой Виллиса, где для конкретного механизма (по рис. 7, а)  .
.
6.ПЛАНЕТАРНЫЕ ЗУБЧАТЫЕ МЕХАНИЗМЫ
Формулу для передаточного отношения планетарного механизма (рис. 7, б) можно получить из формулы (5), если принять в ней  . После преобразования получим
. После преобразования получим
 - формула Виллиса, (6)
- формула Виллиса, (6)
Где  .
.
Передаточное отношение от водила Н к колесу 1 определяется по формуле
 (7)
(7)
Формулы (6) и (7) справедливы только для планетарной ступени.
В некоторых случаях целесообразнее использовать комбинированные зубчатые механизмы, составленные из передач разных типов. Например, механизм, показанный на рис. 4, имеет две простые ступени и одну планетарную. Передаточное отношение всего механизма

Передаточное отношение от колеса j к сателлиту 2 также определяется методом обращения движения
 (8)
(8)
Где 
В общем случае формула (8) будет иметь вид
 (9)
(9)
Где j – номер колеса, k – сателлита,
или  , (10)
, (10)
ikH и ijH определяются по формуле Виллиса.
7.ДИФФЕРИНЦИАЛЬНЫЕ МЕХАНИЗМЫ
Для дифференциального механизма (рис. 7, а) имеют
 (11)
(11)
При заданных  и
и  можно определить
можно определить  из формулы (11). После преобразований получают
из формулы (11). После преобразований получают
 , (12)
, (12)
где , 
Формулы (11) и (12) справедливы только для дифференциальной ступени.
8.ЗАМКНУТЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ МЕХАНИЗМЫ
В машиностроении применяется замкнутый дифференциальный механизм, имеющий одну степень подвижности (рис. 8) В этом механизме между звеньями дифференциала и центральным колесом устанавливается промежуточная простая зубчатая передача. Водило Н жестко связанно с колесом 5  . С ведущего колеса 1 на ведомое колесо 5 движение передается двумя путями: первый – через сателлит 2 и водило Н, второй через сателлит 2, колеса 3, 3`, 4. Обычно в такой схеме z1=z3`, z2=z4, z3=z5. Передаточное отношение
. С ведущего колеса 1 на ведомое колесо 5 движение передается двумя путями: первый – через сателлит 2 и водило Н, второй через сателлит 2, колеса 3, 3`, 4. Обычно в такой схеме z1=z3`, z2=z4, z3=z5. Передаточное отношение  определяется с применением формулы Виллиса и будет равно
определяется с применением формулы Виллиса и будет равно
 . (13)
. (13)
| <== предыдущая лекция | | | следующая лекция ==> |
| | | Организация производства в инструментальных цехах |
Дата добавления: 2019-10-16; просмотров: 2585;