EPROM, EEPROM и flash‑память
На заре возникновения памяти, сохраняющей данные при отключении питания (EPROM, E rasable P rogrammable ROM , стираемая/программируемая ROM, или по‑русски – ПИЗУ, программируемое ПЗУ), основным типом ее была память, стираемая ультрафиолетом: UV‑EPROM (Ultra‑Violet EPROM , УФ‑ППЗУ). Причем часто приставку UV опускали, т. к. всем было понятно, что EPROM – это стираемая ультрафиолетом, a ROM (или ПЗУ) просто, без добавлений – это однократно программируемые кристаллы OTP‑ROM. Микроконтроллеры с УФ‑памятью программ были распространены еще в середине 1990‑х. В рабочих образцах устройств с УФ‑памятью кварцевое окошечко, через которое осуществлялось стирание, заклеивали кусочком черной липкой ленты, т. к. информация в UV‑EPROM медленно разрушается и на солнечном свету.
На рис. 18.7 показано устройство элементарной ячейки EPROM, которая лежит в основе всех современных типов flash‑памяти. Если исключить из нее то, что обозначено надписью «плавающий затвор», мы получим самый обычный полевой транзистор – точно такой же входит в ячейку DRAM. Если подать на управляющий затвор такого транзистора положительное напряжение, то он откроется, и через него потечет ток (это считается состоянием логической единицы). На рис. 18.7 вверху изображен такой случай, когда плавающий затвор не оказывает никакого влияния на работу ячейки, – например, такое состояние характерно для чистой flash‑памяти, в которую еще ни разу ничего не записывали.
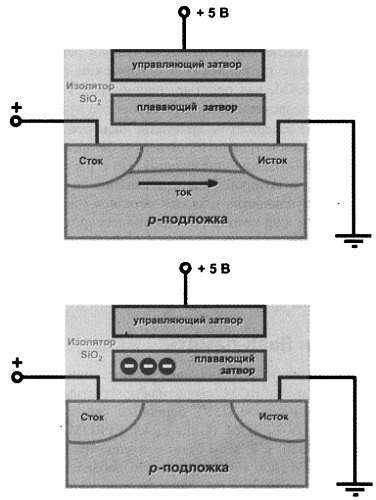
Рис. 18.7. Устройство элементарной ячейки EPROM
Если же мы каким‑то образом (каким – поговорим отдельно) ухитримся разместить на плавающем затворе некоторое количество зарядов – свободных электронов, которые показаны на рис. 18.7 внизу в виде темных кружочков со значком минуса, то они будут экранировать действие управляющего электрода, и такой транзистор вообще перестанет проводить ток. Это состояние логического нуля. Поскольку плавающий затвор потому так и называется, что он «плавает» в толще изолятора (двуокиси кремния), то сообщенные ему однажды заряды в покое никуда деваться не могут. И записанная таким образом информация может храниться десятилетиями (до последнего времени производители обычно давали гарантию на 10 лет, но на, практике в обычных условиях время хранения значительно больше).
* * *
Заметки на полях
Строго говоря, в NAND‑чипах (о которых далее) логика обязана быть обратной. Если в обычной EPROM запрограммированную ячейку вы не можете открыть подачей считывающего напряжения, то там наоборот – ее нельзя запереть снятием напряжения. Поэтому, в частности, чистая NAND‑память выдает все нули, а не единицы, как EPROM. Но это нюансы, которые не меняют суть дела.
* * *
Осталось всего ничего – придумать, как размещать заряды на изолированном от всех внешних влияний плавающем затворе. И не только размещать – ведь иногда память и стирать приходится, потому должен существовать способ их извлекать оттуда. В UV‑EPROM слой окисла между плавающим затвором и подложкой был достаточно толстым (если величину 50 нанометров можно охарактеризовать словом «толстый», конечно), и работало все это довольно грубо. При записи на управляющий затвор подавали достаточно высокое положительное напряжение – иногда до 36–40 В, а на сток транзистора – небольшое положительное. При этом электроны, которые двигались от истока к стоку, настолько ускорялись полем управляющего электрода, что просто перепрыгивали барьер в виде изолятора между подложкой и плавающим затвором. Такой процесс называется еще инжекцией горячих электронов .
Ток заряда при этом достигал миллиампера – можете себе представить, каково было потребление всей схемы, если в ней одновременно программировать хотя бы несколько тысяч ячеек. И хотя такой ток требовался на достаточно короткое время (впрочем, с точки зрения быстродействия схемы не такое уж и короткое – миллисекунды), но это было крупнейшим недостатком всех старых образцов EPROM‑памяти. Еще хуже другое – и изолятор, и сам плавающий затвор такого издевательства долго не выдерживали и постепенно деградировали, отчего количество циклов стирания/записи было ограничено нескольким сотнями, максимум – тысячами. Во многих образцах flash‑памяти более позднего времени даже была предусмотрена специальная схема для хранения карты «битых» ячеек – в точности так, как это делается для жестких дисков. В современных моделях с миллионами ячеек такая карта тоже имеется – однако число циклов стирания/записи теперь возросло до сотен тысяч. Как этого удалось добиться?
Сначала посмотрим, как осуществлялось в этой схеме стирание. В UV‑EPROM при облучении ультрафиолетом фотоны высокой энергии сообщали электронам на плавающем затворе достаточный импульс для того, чтобы они «прыгнули» обратно на подложку самостоятельно, без каких‑либо электрических воздействий. Первые образцы электрически стираемой памяти (EEPROM, Electrically Erasable Programmable ROM , электрически стираемое перепрограммируемое ПЗУ, ЭСППЗУ) были созданы в компании Intel в конце 1970‑х при непосредственном участии будущего основателя Atmel Джорджа Перлегоса. Он использовал квантовый эффект туннелирования Фаулера–Нордхейма . За этим непонятным названием кроется довольно простое по сути (но очень сложное с физической точки зрения) явление – при достаточно тонкой пленке изолятора (ее толщину пришлось уменьшить с 50 до 10 нм) электроны, если их слегка подтолкнуть подачей не слишком высокого напряжения в нужном направлении, могут просачиваться через барьер, не перепрыгивая его. Сам процесс показан на рис. 18.8 вверху (обратите внимание на знак напряжения на управляющем электроде).
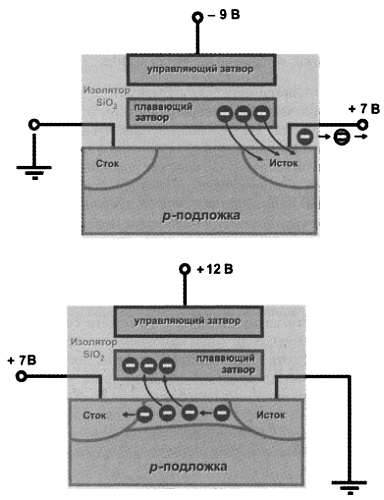
Рис. 18.8. Процесс стирания в элементарной ячейке EPROM
Старые образцы EEPROM именно так и работали: запись производилась «горячей инжекцией», а стирание – «квантовым туннелированием». Оттого они были довольно сложны в эксплуатации – разработчики со стажем помнят, что первые микросхемы EEPROM требовали два, а то и три питающих напряжения, причем подавать их при записи и стирании требовалось в определенной последовательности.
Превращение EEPROM во flash происходило по трем разным направлениям. В первую очередь – в направлении совершенствования конструкции самой ячейки. Для начала избавились от самой противной стадии – «горячей инжекции». Вместо нее при записи стали также использовать «квантовое туннелирование», как и при стирании. На рис. 18.8 внизу показан этот процесс – если при открытом транзисторе подать на управляющий затвор достаточно высокое (но значительно меньшее, чем при «горячей инжекции») напряжение, то часть электронов, двигающихся через открытый транзистор от истока к стоку, «просочится» через изолятор и окажется на плавающем затворе. Потребление тока при записи снизилось на несколько порядков. Изолятор, правда, пришлось сделать еще тоньше, что обусловило довольно большие трудности с внедрением этой технологии в производство.
Второе направление – ячейку сделали несколько сложнее, пристроив к ней второй транзистор (обычный, не двухзатворный), который разделил вывод стока и считывающую шину всей микросхемы. Благодаря всему этому удалось добиться значительного повышения долговечности – до сотен тысяч циклов записи/стирания (миллионы циклов, характерные для флэш‑карточек, получаются, если добавить схемы коррекции ошибок). Кроме того, схемы формирования высокого напряжения и соответствующие генераторы импульсов записи/стирания перенесли внутрь микросхемы, отчего пользоваться этими типами памяти стало несравненно удобнее – они стали питаться от одного напряжения (5, 3,3 или даже 1,8 В).
И, наконец, третье, едва ли не самое главное, усовершенствование заключалось в изменении организации доступа к ячейкам на кристалле, вследствие чего этот тип памяти и заслужил наименование – flash (т. е. «молния»), ныне известное каждому владельцу цифровой камеры или карманного МРЗ‑плеера. Так в середине 1980‑х назвали разновидность EEPROM, в которой стирание и запись производились сразу целыми блоками – страницами. Процедура чтения из произвольной ячейки, впрочем, по понятным причинам замедлилась – для его ускорения приходится на кристаллах flash‑памяти располагать промежуточную (буферную) SRAM. Для флэш‑накопителей это не имеет особого значения, т. к. там все равно данные читаются и пишутся сразу большими массивами, но для использования в микроконтроллерах это может оказаться неудобным. Тем более, в МК неудобно использовать самый быстродействующий вариант flash‑технологии – так называемую память типа NAND (от наименования логической функции «И‑НЕ»), где читать и записывать память в принципе возможно только блоками по 512 байт (это обычная величина сектора на жестком диске, также читаемого и записываемого целиком за один раз, – отсюда можно понять основное назначение NAND).
В МК обычно используют традиционную (типа NOR) flash‑память программ, в которой страницы относительно невелики по размерам – порядка 64‑256 байтов. Впрочем, если пользователь сам не берется за создание программатора для такой микросхемы, он может о страничном характере памяти и не догадываться. А для пользовательских данных применяют EEPROM либо с возможностью чтения произвольного байта, либо секционированную, но на очень маленькие блоки – например, по 4 байта. При этом для пользователя все равно доступ остается побайтным. Характерной чертой такой памяти является довольно медленная (порядка миллисекунд) процедура записи, в то время как чтение протекает ничуть не медленнее любых других операций в МК.
Развитие технологий flash‑памяти имело огромное значение для удешевления и доступности микроконтроллеров. В дальнейшем мы будем иметь дело с энергонезависимой памятью не только в виде встроенных в микроконтроллер памяти программ и данных, но и с отдельными микросхемами, позволяющими записывать довольно большие объемы информации.
Микроконтроллеры Atmel AVR
Общее количество существующих семейств микроконтроллеров оценивается приблизительно в 100 с лишним, причем ежегодно появляются все новые и новые. Каждое из этих семейств может включать десятки разных моделей. Причем львиная доля выпускаемых чипов приходится на специализированные контроллеры – например, для управления USB‑интерфейсом или ЖК‑дисплеями. Иногда довольно трудно классифицировать продукт – так, многие представители семейства ARM, которое широко применяется для построения мобильных устройств, с точки зрения развитой встроенной функциональности относятся к типичным контроллерам, но в то же время достаточно мощное ядро позволяет отнести их и к классу микропроцессоров.
Из семейств универсальных 8‑разрядных микроконтроллеров, так сказать, «на все случаи жизни», наиболее распространены три: контроллеры классической архитектуры х51 (первый контроллер семейства 8051 был выпущен фирмой Intel еще в середине 1980‑х), контроллеры PIC фирмы Microchip (идеально подходят для проектирования несложных устройств, особенно предназначенных для тиражирования), и рассматриваемые нами Atmel AVR .
* * *
Заметки на полях
В 1995 году два студента Норвежского университета науки и технологий в г. Тронхейме, Альф Боген и Вегард Воллен, выдвинули идею 8‑разрядного RISC‑ядра, которую предложили руководству Atmel. Имена разработчиков вошли в название архитектуры AVR: Alf + Vegard + RISC. В Atmel идея настолько понравилась, что в 1996 году был основан исследовательский центр в Тронхейме, и уже в конце того же года начат выпуск первого опытного микроконтроллера новой серии AVR под названием AT90S1200. Во второй половине 1997 года корпорация Atmel приступила к серийному производству семейства AVR.
Почему AVR ?
У AVR‑контроллеров «с рождения» есть несколько особенностей, которые отличают это семейство от остальных МК, упрощают его изучение и применение. Одним из существенных преимуществ AVR стало использование конвейера. В результате для AVR не существует понятия машинного цикла: большинство команд, как мы говорили, выполняется за один такт (для сравнения отметим, что пользующиеся большой популярностью МК семейства PIC выполняют команду за 4 такта). Правда, при этом пришлось немного пожертвовать простотой системы команд, есть некоторые сложности и в области операций с битами. Тем не менее, это не приводит к заметным трудностям при изучении AVR‑ассемблера – наоборот, программы получаются короче и больше напоминают программу на языке высокого уровня (отметим, что AVR проектировались специально в расчете на максимальное приближение к структуре языка С ).
Другое огромное преимущество AVR‑архитектуры – наличие 32 оперативных регистров, не во всем равноправных, но позволяющих в простейших случаях обходиться без обращения к оперативной памяти и, что еще важнее, без использования стека – главного источника ошибок у начинающих программистов (мало того, в младших моделях AVR стек даже недоступен для программиста). Для AVR не существует понятия «аккумулятора», ключевого для ряда других семейств. Это еще больше приближает структуру ассемблерных программ для AVR к программам на языке высокого уровня, где операторы работают не с ячейками памяти и регистрами, а с абстрактными переменными и константами.
Но это, конечно, не значит, что AVR – однозначно лучшее в мире семейство МК. У него есть и ряд недостатков (например, несовершенная система защиты энергонезависимой памяти данных – EEPROM, некоторые вопросы с помехоустойчивостью, излишние сложности в системе команд и структуре программ и т. п.). А учитывая, что любые универсальные современные МК позволяют делать все то же самое, вопрос выбора платформы – вопрос в значительной степени предпочтений и личного опыта разработчика.
Несомненно, истинным подарком для фирмы Atmel стала позиция итальянских инженеров, выбравших в 2004 году AVR для любительской платформы Arduino, отчего популярность этого семейства быстро выросла, и за его будущее можно не беспокоиться. Об Arduino мы будем подробно говорить в последних главах этой книги.
Classic, Mega и Tiny
Линейка универсальных контроллеров AVR общего назначения делится на семейства: Classic, Mega и Tiny (есть и новейшее семейство Xmega , содержащее весьма «навороченные» кристаллы). МК семейства Classic (они именовались, как АТ908<марка контроллера>) ныне уже не производятся, однако все еще распространены в литературе, т. к. для них наработано значительное количество программ. Чтобы пользователям не пришлось переписывать все ПО, фирма Atmel позаботилась о преемственности – большинство МК семейства Classic имеет функциональные аналоги в семействе Mega, например, AT90S8515 – ATmega8515, AT90S8535 – ATmega8535 и т. п. (только AT90S2313 имеет аналог в семействе Tiny – ATtiny2313).
Полная совместимость обеспечивается специальным установочным битом (из набора так называемых Fuse‑битoв) , при программировании которого Mega‑контроллер начинает функционировать, как Classic (подробнее об этом рассказано в главе 19 ). Для вновь разрабатываемых устройств обычно нет никакого смысла в использовании их в режиме совместимости, однако такой прием в ряде случаев может оказаться полезным для начинающих, поскольку программы для МК Classic устроены проще и часто встречаются в литературе.
Семейство Tiny (что в буквальном переводе означает «крохотный») предназначено для наиболее простых устройств. Часть МК этого семейства не имеет возможности программирования по последовательному интерфейсу, и потому мы их, за исключением ATtiny2313, не будем рассматривать в этой книге (это не значит, что остальных Tiny следует избегать – среди них есть очень удобные и функциональные микросхемы, нередко вообще не имеющие аналогов). У составляющего исключение МК ATtiny2313 отсутствует бит совместимости с «классическим» аналогом AT90S2313, одним из самых простых и удобных контроллеров Atmel , но при внимательном рассмотрении оказывается, что они и без такого бита совместимы «снизу вверх», – программы для «классического» 2313 практически полностью подходят и для Tiny2313 (см. главу 19 ).
Структура МК AVR
Общая структура внутреннего устройства МК AVR приведена на рис. 18.9. Здесь показаны все основные компоненты AVR (за исключением некоторых специализированных) – в отдельных моделях некоторые компоненты могут отсутствовать или различаться по характеристикам, неизменным остается только общее 8‑разрядное процессорное ядро (GPU, General Processing Unit ). Кратко рассмотрим наиболее важные компоненты, с большинством из которых мы познакомимся в дальнейшем подробнее.
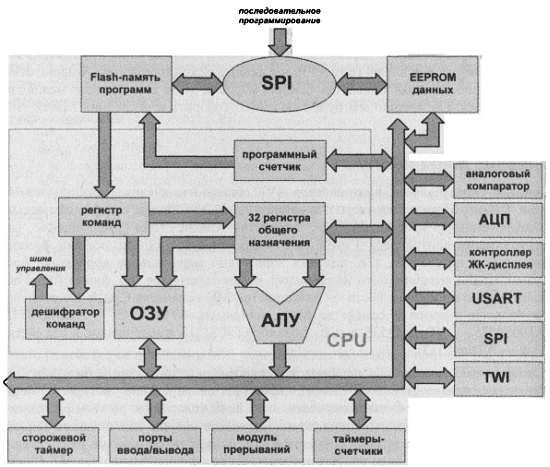
Рис. 18.9. Общая структурная схема микроконтроллеров AVR
Начнем с памяти. В структуре AVR имеются три разновидности памяти: flash‑память программ, ОЗУ (SRAM) для временного хранения данных и энергонезависимая память (EEPROM) для долговременного хранения констант и данных. Рассмотрим их по отдельности.
Память программ
Встроенная flash‑память программ в AVR‑контроллерах имеет объем от 1 Кбайт у ATtiny11 до 256 Кбайт у ATmega2560. Первое число в наименовании модели содержит величину этой памяти в килобайтах из ряда: 1, 2, 4, 8, 16, 32, 64, 128 и 256 Кбайт. Так, ATtiny2313 имеет 2 Кбайт памяти, a ATmega8535 – 8 Кбайт.
С точки зрения программиста память программ можно считать построенной из отдельных ячеек – слов по два байта каждое. Устройство памяти программ (и только этой памяти!) по двухбайтовым словам – очень важный момент, который ассемблерному программисту нужно твердо усвоить. Такая организация обусловлена тем, что любая команда в AVR имеет длину ровно 2 байта. Исключение составляют команды jmp, call и некоторые другие (например, lds ), которые оперируют с адресами 16‑разрядной и более длины. Длина этих команд составляет 4 байта, и они используются лишь в моделях с памятью программ более 8 Кбайт, поэтому в этом разделе книги вы их не встретите. Arduino основано на AVR‑контроллерах с большим объемом памяти, но там нам об этих тонкостях знать необязательно. Во всех остальных случаях счетчик команд сдвигается при выполнении очередной команды на 2 байта (одно слово), поэтому необходимую емкость памяти легко подсчитать, зная просто число используемых команд.
По умолчанию все контроллеры AVR всегда начинают выполнение программы с адреса $0000[29]. Если в программе не используются прерывания, то с этого адреса может начинаться прикладная программа, как мы увидим далее. В противном случае по этому адресу располагается так называемая таблица векторов прерываний , подробнее о которой мы будем говорить в главе 19 .
Память данных (ОЗУ, SRAM )
В отличие от памяти программ, адресное пространство памяти данных адресуется побайтно (а не пословно). Адресация полностью линейная, без какого‑либо деления на страницы, сегменты или банки, как это принято в некоторых других системах.
Исключая некоторые младшие модели Tiny, объем встроенной SRAM колеблется от 128 байтов (например, у ATtiny2313) до 4–8 Кбайт у старших моделей Mega . Адресное пространство статической памяти данных (SRAM) условно делится на несколько областей, показанных на рис. 18.10. К собственно встроенной SRAM относится лишь затемненная часть, до нее по порядку адресов расположено адресное пространство регистров, где первые 32 байта занимает массив регистров общего назначения (РОН), еще 64 – регистров ввода/вывода (РВВ).
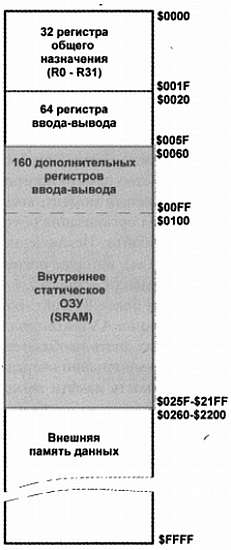
Рис. 18.10. Адресное пространство статической памяти данных (SRAM ) микроконтроллеров AVR
Для некоторых моделей Mega (ATmega8515, ATmega162, ATmega128, ATmega2560 и др.) предусмотрена возможность подключения внешней памяти объемом до 64 Кбайт. Отметим, что адресные пространства РОН и РВВ не отнимают пространство у ОЗУ данных – так, если в конкретной модели МК имеется 512 байтов SRAM, а пространство регистров занимает первые 96 байтов (до адреса $5f), to адреса SRAM займут адресное пространство от $0060 до $025F (т. е. от 96 до 607 ячейки включительно). Конец встроенной памяти данных обозначается константой RAMEND . Следует учесть, что последние адреса SRAM, как минимум, на четыре‑шесть ячеек от конца (в зависимости от количества вложенных вызовов процедур – для надежности лучше принять это число равным десяти или даже более) занимать данными не следует, т. к. они при использовании подпрограмм и прерываний заняты под стек.
Операции чтения/записи в память одинаково работают с любыми адресами из доступного пространства, и потому при работе с SRAM нужно быть внимательным, – вместо записи в память вы легко можете «попасть» в какой‑нибудь регистр. Для обращения к РОН, как к ячейкам памяти, можно в качестве адреса подставлять номер регистра, а вот при обращении к РВВ таким же способом к номеру последнего нужно прибавлять $20. Следует также помнить, что по умолчанию при включении питания все РВВ устанавливаются в нулевое состояние во всех битах (единичные исключения все же имеются, поэтому в критичных случаях надо смотреть документацию), а вот РОН и ячейки SRAM могут принимать произвольные значения.
Энергонезависимая память данных (EEPROM )
Все модели МК AVR (кроме снятого с производства ATtiny11) имеют встроенную EEPROM для хранения констант и данных при отключении питания. В разных моделях объем ее варьируется от 64 байтов (ATtinylx) до 4 Кбайт (старшие модели Mega). Число циклов перепрограммирования EEPROM может достигать 100 тыс.
Напомним, что EEPROM отличается от flash‑памяти возможностью выборочного программирования побайтно (вообще‑то, даже побитно, но эта возможность скрыта от пользователя). Чтение из EEPROM осуществляется с такой же скоростью, как и чтение из РОН, – в течение одного машинного цикла (правда, на практике оно растягивается на 4 цикла, но программисту следить за этим специально не требуется). А вот запись в EEPROM протекает значительно медленнее и к тому же с неопределенной скоростью – цикл записи одного байта может занимать от 2 до 4 и более миллисекунд. Процесс записи регулируется встроенным RC‑генератором, частота которого нестабильна (при низком напряжении питания можно ожидать, что время записи будет больше). За такое время при обычных тактовых частотах МК успевает выполнить несколько тысяч команд, поэтому программирование процедуры записи требует аккуратности – например, нужно следить, чтобы в момент записи не «вклинилось» прерывание (подробнее об этом далее).
Главная же сложность при использовании EEPROM – то, что при недостаточно быстром снижении напряжения питания в момент выключения содержимое ее может быть испорчено. Обусловлено это тем, что при снижении напряжения питания ниже некоторого порога (ниже порога стабильной работы, но недостаточного для полного выключения) и вследствие его дребезга МК начинает выполнять произвольные команды, в том числе может выполнить и процедуру записи в EEPROM, если она имеется в программе. Если учесть, что типовая команда МК AVR выполняется за десятые доли микросекунды, то ясно, что никакой реальный источник питания не может обеспечить снижение напряжения до нуля за нужное время. По опыту автора при питании от обычного стабилизатора типа LM7805 с рекомендованными значениями емкости конденсаторов на входе и на выходе содержимое EEPROM будет испорчено примерно в половине случаев.
Этой проблемы не должно существовать, если запись констант в EEPROM производится при программировании МК, а процедура записи в программе отсутствует. Во всех же остальных случаях (а их, очевидно, абсолютное большинство – EEPROM чаще всего используется для хранения пользовательских установок и текущей конфигурации при выключении питания) приходится принимать специальные меры. Встроенный детектор падения напряжения (Brown‑Out Detection , BOD), имеющийся практически во всех моделях Tiny и Mega , обычно с этим не справляется. Наиболее кардинальной из таких мер является установка внешнего монитора питания, удерживающего МК при снижении напряжения питания ниже пороговой величины в состоянии сброса (подробности см. [21]).
Дата добавления: 2016-05-11; просмотров: 10247;