Вимірювальні трансформатори струму та напруги .
Призначення ВТН та ВТС:
1)розширення меж вимірювання ЗВ за струмом та напругою;
2)відділення високовольтних ланцюгів (первинних) від ланцюгів (вторинних ), де ввімкнено ЗВ та, з якими працює персонал;
3)давач інформації для ланцюгів РЗА (релейного захисту автоматики ).
5.1 Схеми підключення приладів через ВТС та ВТН.
Для однорідного кола:
Співвідношення: І2=КІ·І1; KI=  ;
;
f1 ≈f2 U1=KU·U2; KU=  ;
;
cosϕ1 ≈ cosϕ2 P2=I1·U2=KI·I2·KU·U2=KIKU·P2;
Для трифазного кола:
Співвідношення : Іа + Іс =-Іb ;
Іа =КІ · ІА ;
UAB =Ku ·Uab ;
(Pa +Pc) · KI · Ku =P1 .
5.2 Загальні характеристики вимірювальних трансформаторів .
1) ТС: ТН:
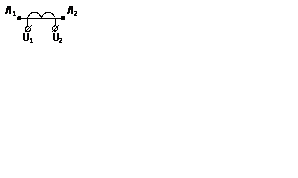
Лі –лінія; Uі-напруга;
2)Кількість витків :
ω1 < ω2 ω1 > ω2
І1 > І2 U1 > U2
3) вторинні номінальні параметри :
Струми І2н=5А(1А) напруга: U2н=100В (  )
)
за ГОСТ 7746-78Е
4)коефіцієнт трансформації:
КІ=І1/І2 Кu= U1/U2
номінальний
КІн=І1н/І2н Ku=U1H/U2H
дійсний
Кіg=I1g/I2g Kug=U1g/U2g
витків Кω= 
І1н≤ 40000 А U1H < 750  B
B
5)похибки
за струмом : ɤІ , % за напругою ɤu ,%
ɤ=  ; ɤu=
; ɤu=  =
=
I2=I1 · KIH; I2g =I1 · KIg . = 
U2H=U2·Kuн ; U2g=U1·Kug
ɤІ визначає клас точності ВТС ɤu визначаємо клас точності ВТН
ɤІ=  ≈(1-
≈(1-  )·100% ɤu=
)·100% ɤu=  ·100% ≈ (1-
·100% ≈ (1-  )· 100%
)· 100%
KIg = KIH(1-  ) Kug= KHU (1-
) Kug= KHU (1-  )
)
Котова похибка (через неточність передачі фази первинної величини до вторинної)
δI =  ·100% δu=
·100% δu=  ·100%
·100%
δI→δ , => sinδ1→ δ1 =>
(1ряд =34380)
δI =0,0291(δI- δu)·tgφ·[%]
5.3 Вимірювальні трансформатори струму
У вторинну обмотку ВТС вмикають прилади із малим опором, тому робочий режим роботи ВТС блищий до короткого замикання.
І1·ω1- магніторушійна сила (МРС) первинної обмотки;
І2ω2- МРС вторинної обмотки;
U2=I2R+I2X- напруга вторинної обмотки;
ϕ0- потік в магнітопроводі ВТС;
Е2-ЕРС, що наводиться потоком ϕ0 у вторинній обмотці ;
І0ω1- повна МРС трансформатора;
І0 ≈ Ікз- струм намагнічування.
Опір навантаження: Z=R+jX
опір обмотки ВТС (вторинної): Z2=R2+jX2
I0pω1- реактивна складова повної МРС ВТС;
I0aω1- активна складова повної МРС ВТС.
Колиб кут між І1 та І2 ,був 1800(абсолютна трансформація),то кут (І1ω1^І2ω2)= Ø, але через не ідеальність виникає кутова похибка δІ колиб відбувалася абсолютна (ідеальна) трансформація, то І1ω1 = І2ω2; =>  = =КІ.
= =КІ.
Однак в реальності І1ω1= І2ω2, точніше: І1ω1= І2ω2+ɤ1.
Відрізок АВ є похибкою ВТС за струмом, А коли δ1→0, то sinδI→δ1, тоді відрізок ВС є кутовою похибкою δ1.
В номінальному режимі роботи ВТС зазвичай І0ω1=0,01·І1ω1(1% від І1ω1).
В режимі холостого ходу І2=Ø тоді І0ω1=І1ω1. Це викликає різне зростання потоку ϕ0, а це в свою чергу, приводить до різкого зростання Е2 (до кількох сотень вольт), що викликає електропробій ізоляції. Окрім того ріст ϕ0 приводить до зростання втрат на вихрові струми та гістерезис магнітопровіда. Це викликає зростання температури аж до термічного руйнування ізоляції.
Висновки:
1) похибка ВТС ɤ1зростає із ростом повної МРС І0ω1.
2) зростання опору вторинної обмотки ВТС та ріст опору навантаження приводить до зростання Е2, що збільшує потік ϕ0 та МРС І0ω1.Тому нормується для кожного ВТС номінальне навантаження вторинного кола: Sном = І22ном·Zном, де Sном – номінальна потужність ВТС.
3) І0 зменшується із ростом перерізу магніто провода та зменшенням його довжини. Тобто зменшення магнітної індукції зменшує І0. Тому у вимірювальних ТС, на відміну від силових, В = (0,05÷0,15) Тл.
4)похибки ВТС залежать від номінального і реального значення вторинного струму І2:
Таким чином при зменшені І2/Іном збільшується похибки ɤІ δІ.
Класи точності: 0,01; 0,02; 0,05; 0,1; 0,2; 0,5; 1; 3; 5; 10;
Для розширення меж ВТС крізь сердечник трансформатору намотують додадкові витки зі вторинної обмотки. Тоді з рівності МРС (в ідеалі): І1ω1=І2ω2
Наприклад УТТ-5М має:
І2=5А; І1=(15А, 50А)
І1max=600А; тоді  =
=  =
=  =
=  якщо І2= 200А, то КІ=
якщо І2= 200А, то КІ=  =40, Кw =
=40, Кw =  =
=  = 40, ω1=
= 40, ω1=  =
=  = 3 =
= 3 =  .
.
5.4. Вимірювальні трансформатори напруги.
Нормальний режим роботи ВТС близький до режиму холостого ходу, оскільки до вторинної обмотки підмикають прилади зі відносно великим опором. Припустимо, що кількість витків ω1=ω2.
Тоді:
опір навантаження (вторинного кола): Z2= R2+jX; опір вторинної обмотки: Z2= R2+jX2; опір первинної обмотки: Z1=R1+jX1.
Тоді: U2=I2R+ I2·jX;
E2=U2+I2(R2+I2jX2);
U1= -E2+I1R1+I1jX1.
Після підставлення: U1= -(U2+I2R2+I2-jX2)+I1R1+I1·jX1.
Струми І1=І0 – I2 (див. діаграму).
Тоді: U1= -(U2+I2R2+I2·jX2)+(I0-I2)R1+(I0-I2)jX1= -U2+I0R1+I0jX1 –I2(R1+R2) –I2(X1+X2)= -U2 +I0Z1 –I2(Z1+Z2). U1 = U2; I0Z1- I2(Z1+Z2) ɤu (ɤu- відрізок СВ).
За малого кута δu sinδu→ δu, тобто відрізок АВ є кутовою похибкою δu.
Найбільший вплив на похибку має навантаження у вторинному колі ВТН.
Sном – номінальна потужність ВТС (для вторинного кола).
Класи точності : 0,2; 0,5; 1; 2; 3 та 0,05; 01; 02.
6. Мостові вимірювальні схеми.
Принцип вимірювання мостової схеми полягає у порівнянні вимірюваної величини із зразковою (мірою). Вони використовуються як вимірювальні прилади (опори, індуктивність, емність, добротність, тангенс кута втрат або температура, перміщення тощо), як прилади автоматики, як фільтри.
Розрізняють мости:
1) Постійного струму:
- Чотирьохплечні (одинарні);
- Шостиплечні (подвійні);
2) Змінного струму.
ab – діагональ живлення;
сd – діагональ навантаження;
(Z0 – опір навантаження) .
Коли міст зрівноважено:Uж = 0; U0=Ø; I0=Ø. Тоді можна записати рівність напруги: І1·Z1=I2·Z2; I2Z2=I4Z4; щоб потенціали точок с та d були рівними. Оскільки І0=0, то за законом кіргофа: І1=І2; І3=І4. Звідси  =
=  =
=  =
=  ;
;
Z1·Z4=Z3·Z2. Це рівняння рівноваги моста, за яким завжди можна встановити значення будь-якого опору, якщо відомо 3 інші.
Для того, щоб бути впевненим в тому, що міст зрівноважено замість Z0 беруть нуль-індекатор (гальванометер, що з точністю до 6 знаку покаже І0-Ø).
6.1 Однорідні мости постійного струму.
Z1= R1, Z2= R2, Z3= R3, Z4= R4.
Рівняння рівноваги:
R1·R4=R2·R3;
Рівняння вимірювання:
R1=R2  .
Чутливість такого мосту:
SI= .
Чутливість такого мосту:
SI=  = =  ; або Su= ; або Su=  ; ;
|
На постійному струмі:
Або із врахуванням чутливості гальванометру Sм = SI·Sг =  ·
·  =
=  . На практиці чутливість мосту Sм знаходять не до абсолютної зміни невідомого опору ΔR1а до відносної
. На практиці чутливість мосту Sм знаходять не до абсолютної зміни невідомого опору ΔR1а до відносної  . Тобто: Sм=
. Тобто: Sм=  .
.
6.2 Подвійні мости постійного струму.
Для того, щоб виключити вплив опорів з’єднувальних провідників на регулятор вимірювання невідомий (той, що вимірюється) опір підключають за чотирьох затискачною схемою, так само як і зразковий опір R0. Тоді рівняння рівноваги ускладниться : R1(R0+RT20)=R2(RX+RT2X),
RT20=  ; RT2X = ; RT2X =  , ,
|
де r – опір провідників;
RT20 – опір в точці T20(на затискачі).
Звідси :
R1(R0+ )=R2(Rx+ );
R1R0+  =R2Rx +
=R2Rx +  ;
;
Rx= R0  +
+  =R0 + ΔR.
=R0 + ΔR.
Для того, щоб похибка ΔR=Ø необхідно, щоб чисельник дорівнював ”Ø”. Це можливо коли  –
–  = Ø. Тобто необхідно щоб:
= Ø. Тобто необхідно щоб:  =
=  .
.
Рівності похибки підстроювання можна добитися за одночасного підстроювання (зміни) опорів R1 та R2, й R2 та R4. Тоді ΔR1= ΔR3, а ΔR2= ΔR4.
Подвійний міст застосовується для вимірювання опорів від 10-8Ом до 10 Ом із точністю 0,2% від межі вимірювання.
6.3 Мости змінного струму.
Z1·Z4 = Z2 · Z3; φ1+φ4 = φ2+φ3.
| невідоме | Плечі моста | ||||
| Z1 | Z2 | Z3 | Z4 | Співвідношення | |
| x; tg δx Із малими втратами | | | | | Сх=  ; Rx= ; Rx=  ;
tg δx=ωCxRx=ωCoR0 ;
tg δx=ωCxRx=ωCoR0
|
| -із великими втратами | | | | | tg δ=  = = 
|

| | | | | Lx=  ; Rx= ; Rx= 
|
| RX < RO | | | | | Lx= ;
Rx= 
|
| LX; QX | | | | | Lx=C0R1R2; Rx=  ;
Q= ;
Q=  =ωC0R0 =ωC0R0
|
| tg δ ізояції (великаU) | | | | | Cx=  ; Rx= ; Rx=  .
tg δ=ωCxRx=ωC2R2 .
tg δ=ωCxRx=ωC2R2
|
1. Вимірювання ємності
Z1·Z4=Z2·Z3; 0679088050 алына
(Rx+  )·R2=(R0+
)·R2=(R0+  )·R1;
)·R1;
Rx·R2+  = R0R1+
= R0R1+  ;
;
Rx·R2+R0R1 => Rx= .
= => Cx .
2.Вимірювання індуктивності та добротності
Z1·Z4=Z2·Z3
(Rx+jωLx)·(  )=R1R2;
)=R1R2;
 =
=  = R1R2;
= R1R2;
Rx·R0 = R1R2, => Rx=
jωL0R0=jωC0R0R1R2, => Lx =C0R2R1
Qx=  =ωC0R0.
=ωC0R0.
3.Вимірювання індуктивності (універсальнийний):
1) Положення 1(R0>RX):
(Rx+jωLx)R2=(R+R0+jωL0)R1;
RxR2+jωLxR2=(R+R0)R1+jωL0R1;
RxR2=R·R1+R0R1;
Rx=  .
jωLxR2=jωL0R1;
Lx=L0 R1/R2. .
jωLxR2=jωL0R1;
Lx=L0 R1/R2.
|
(Rx+jωLx+R)R2= (R0+jωL0)R1;
(Rx+R)R2=R0R1; => Rx=  = .
= .
jωLx·R2=jωL0· R1; => Lx=L0 
| <== предыдущая лекция | | | следующая лекция ==> |
| | |
Дата добавления: 2016-04-19; просмотров: 1780;