БПЛА самолетного типа
Этот тип аппаратов известен также как БПЛА с жестким крылом (англ.: fixed‑wing UAV). Подъемная сила у этих аппаратов создается аэродинамическим способом за счет напора воздуха, набегающего на неподвижное крыло. Аппараты такого типа, как правило, отличаются большой длительностью полета, большой максимальной высотой полета и высокой скоростью.
Существует большое разнообразие подтипов БПЛА самолетного типа, различающихся по форме крыла и фюзеляжа. Практически все схемы компоновки самолета и типы фюзеляжей, которые встречаются в пилотируемой авиации [12], применимы и в беспилотной. На рис. 1.1 – 1.6 представлены некоторые примеры.
На рис. 1.1 показан экспериментальный многоцелевой самолет Proteus разработки американской компании Scaled Composites. Разработаны как пилотируемый, так и беспилотный варианты этого самолета. Особенностью конструкции является тандемная схема расположения крыльев. Его длина составляет 17,1 м, размах задних крыльев 28 м, потолок высоты 16 км (при нагрузке 3,2 т), взлетная масса 5,6 т, максимальная скорость 520 км/ч (на высоте 10 км), длительность полета до 18 ч. Силовая установка – два турбореактивных двигателя с тягой по 10,2 кН .

Рис. 1.1. Экспериментальный самолет Proteus (США, 2006). Под фюзеляжем подвешена гондола с радиолокационным оборудованием
На рис. 1.2 показан разведывательный БПЛА RQ‑4 Global Hawk, разработанный американской фирмой Teledyne Ryan Aeronautical, дочерним предприятием компании Northrop Grumman. Он отличается необычной формой фюзеляжа, в носовой части которого размещено радиолокационное, оптическое и связное оборудование. Аппарат изготовлен из композитных материалов на основе углеволокна и аллюминиевых сплавов, имеет длину 13,5 м, размах крыльев 35 м, взлетную массу около 15 тонн, способен нести полезную нагрузку массой до 900 кг. RQ‑4 Global Hawk может находиться в воздухе до 30 часов на высоте до 18 км. Максимальная скорость 640 км/ч. Силовая установка – турбореактивный двигатель с тяговым усилием 34,5 кН.

Рис. 1.2. БПЛА RQ‑4 Global Hawk (США, 2007)
На рис. 1.3 показан перспективный боевой палубный БПЛА Х‑47В, разрабатываемый компанией Northrop Grumman (США). Он имеет форму широко выгнутой буквы "V" без хвостовой части. Крылья могут складываться, что немаловажно для ограниченной площади палубы авианосца. Для управления полетом БПЛА оснащен 6‑ю рабочими плоскостями. Турбореактивный двигатель канадской фирмы Pratt amp; Whitney обеспечивает высокую скорость полета беспилотного аппарата и расположен в задней части аппарата. Беспилотник состоит из четырех частей, собранных из композитных материалов и соединяющихся примерно в середине корпуса. Самолет имеет длину 11,6 м, размах крыльев 18,9 м (в сложенном состоянии 9,4 м), собственную массу 6,3 т, максимальную взлетную массу 20,2 т. Крейсерская скорость составляет 900 км/ч. Радиус действия 3900 км. Потолок 12,2 км. Предположительно аппарат будет приспособлен для выполнения дозаправки в воздухе. При этом БПЛА будет готов при необходимости беспрерывно выполнять поставленную боевую задачу в течение 80 часов, что на порядок больше длительности полёта боевых самолетов с пилотами [13].

Рис. 1.3. БПЛА X‑47B компании Northrop Grumman (США, 2013)
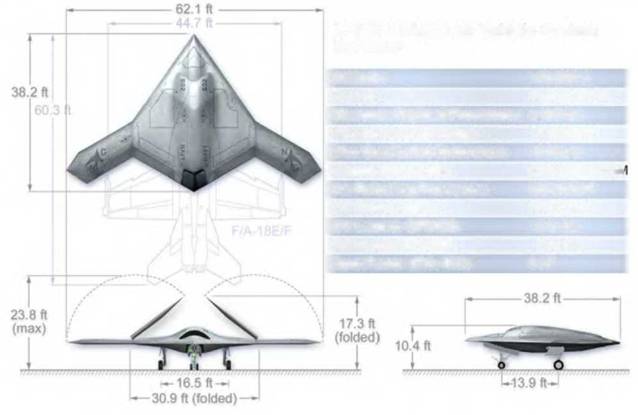
Х‑47В UCAS‑D Air Vehicle System in Focus
Altitude: ›40,000 ft
Speed: High Subsonic
Weapons Payload Provisions: 4,500 lbs
Max Unrefueled Range: ›2,100 NM
Max Unrefueled Endurance: ›6 hours
Sensor Provisions: EO/IR/SAR/ESN
Air Refueling Provisions: USN/USAF
CV Demo TOGW: 44,567 lbs
CV Launch OPWOD: ‑3.6 kts
CV Recovery WOD: 9.3 kts
Spot Factor (F/A‑18C): 0.87
На рис. 1.4 показан ударный БПЛА MQ‑9 Reaper, разработанный американской компанией General Atomics и стоящий на вооружении ВВС США и других стран с 2007 г. Как и многие другие БПЛА, аппарат имеет V‑образное оперение, состоящее из двух наклонных поверхностей, выполняющих функции и горизонтального, и вертикального оперения. Синхронное отклонение управляющих поверхностей играет роль руля высоты и управляет тангажом, а асинхронное руля направления и управляет рысканьем. Для беспилотников V‑образное оперение представляется более экономичным решением, чем классическое. MQ‑9 Reaper оснащен турбовинтовым двигателем, позволяющим развивать скорость более 400 км/ч. Практический потолок составляет 13 км. Максимальная продолжительность полёта равна 24 ч.

Рис. 1.4. БПЛА MQ‑9 Reaper во время боевого вылета в Афганистане, 2008 год.
БПЛА тактического назначения Viking 300 разработки американской компании L‑3 Unmanned Systems представлен на рис. 1.5. Он построен полностью из композитных материалов. Оснащен двухтактным двухцилиндровым двигателем внутреннего сгорания мощностью 25 л.с. с толкающим винтом. Причем винт расположен между основным крылом и хвостовым оперением, а не позади него, как в предыдущем примере. Модульная конструкция позволяет легко собирать и разбирать аппарат. Длительность полета составляет 8‑10 ч при крейсерской скорости 100 км/ч. Максимальная взлетная масса 144 кг, а масса полезной нагрузки 13,5 кг. Радиус действия составляет 50‑75 км. Особенностью аппарата является возможность осуществлять полностью автономные взлет и посадку, которые могут выполняться не только на бетонной полосе, но и на плохо подготовленных поверхностях.

Рис. 1.5. Тактический БПЛА Viking 300 – разработка фирмы L‑3 Unmanned Systems (США, 2009)
Еще один пример (рис. 1.6) – это любительская разработка летающей радиоуправляемой модели с дисковым крылом. Аппарат отличается хорошей маневренностью и способность сохранять стабильность полета на малых скоростях.

Рис. 1.6. Радиоуправляемая модель с дисковым крылом
В качестве движителей аппаратов самолетного типа обычно используются тянущие или толкающие винты, а также импеллеры (лопаточные машины, заключенные в цилиндрический кожух – англ.: impeller, ducted fan, shrouded propeller) или реактивные двигатели.
Для аппаратов самолетного типа обычно необходима взлетно‑посадочная полоса (ВПП) (рис. 1.7 а). Для некоторых типов при взлете используют стартовые катапульты (рис. 1.7 б). Есть также самолетные БПЛА легкого класса, запускаемые "с руки" (рис. 1.7 в). При посадке может применяться ВПП, парашют (рис. 1.8) или специальные уловители (тросы, сетки, растяжки) (рис. 1.9).

а

б

в
Рис. 1.7. Различные типы старта БПЛА самолетного типа: а – запуск с ВПП; б – запуск с катапульты; в – запуск "с руки"

Рис. 1.8. Посадка БПЛА с помощью парашюта
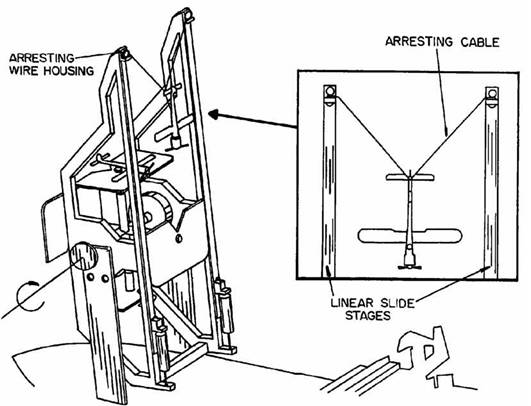
Рис. 1.9. Посадка БПЛА с помощью тормозного троса (иллюстрация к патенту США № 7335067)
Взлеты и посадки традиционных БПЛА самолетного типа – процесс достаточно трудоемкий и затратный, требующий наличия специальных вспомогательных средств (ВПП, устройств запуска и посадки), поэтому разработчики новой техники все чаще обращаются к нетрадиционным схемам самолетных БПЛА, позволяющим создать безаэродромные БАС. Речь идет прежде всего о самолетах вертикального взлета и посадки (СВВП). На сегодняшний день существует много разновидностей аппаратов ВВП [14, 15]. Многие из них являются гибридами самолетов и вертолетов, поэтому рассмотрены в следующих подразделах (см. далее – "Винтокрылы", "Конвертопланы"). Те же СВВП, которым в большей степени присущи свойства самолета, чем вертолета, обычно имеют в качестве движителя реактивный двигатель, импеллер или небольшие по размеру пропеллеры. Их условно можно разделить по положению фюзеляжа при взлете и посадке [16] на аппараты с вертикальным положением фюзеляжа (тэйлситтеры, от англ. – tailsitter) и аппараты с горизонтальным положением фюзеляжа.

Рис. 1.10. Тэйлситтер SkyTote – разработка компании AeroVironment (США, 2006). Основное назначение – быстрая доставка небольших грузов.
Тэйлситтер ы в стартовом положении обычно опираются хвостовой частью на грунт. Если в качестве движителя используются тянущие винты, то они располагаются в носовой части (как в примере, показанном на рис. 1.10). Посадка, как и взлет, у таких аппаратов обычно производится вертикально. Самое сложное для СВВП – это переход с вертикальной фазы полета на горизонтальную и обратно. У показанного на рис. 1.10 БПЛА SkyTote, например, для управления полетом в этих фазах используется даже специальный нейросетевой контроллер [17].
В последнее время в тэйлситтерах все чаще в качестве движителей используют импеллеры, особенно если движитель является толкающим и находится в хвостовой части аппарата, – это энергетически выгоднее обычного пропеллера [18]. Примером может служить разработка группы исследователей южнокорейского института KAIST (Korea Advanced Institute of Science and Technology) (рис. 1.11). У представленного беспилотного тэйлситтера предусмотрена возможность взлета и посадки как вертикально, так и горизонтально (т.е. по‑самолетному – на ВПП) [19].

Рис. 1.11. Тэйлситтер разработки KAIST (Южная Корея, 2012): а – взлет из вертикального положения; б – взлет с ВПП
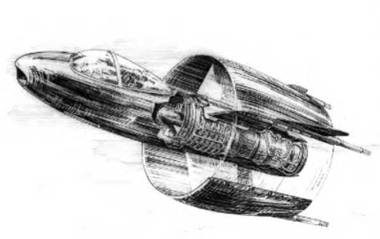
Особой разновидностью тэйлситтеров можно считать т.н. колъцепланы (или колеоптеры) – летательные аппараты с крылом, имеющим при виде спереди правильную кольцевую форму. Внутренняя полость кольцевого крыла обдувается воздушной струёй, отбрасываемой двумя соосными винтами противоположного вращения, расположенными на входе в крыло. Хвостовое оперение в конце короткого фюзеляжа и управляющие элероны, установленные на двух профилированных пилонах, крепящих кольцевое крыло к фюзеляжу, находятся в зоне интенсивного обдува струёй от винтов, что повышает их эффективность. В 1959 во Франции фирмой SNECMA был построен экспериментальный пилотируемый кольцеплан с турбореактивным двигателем и проведены его испытания в вертикально подвешенном состоянии (рис. 1.12). При попытке перейти к горизонтальному полету произошло крушение и после этого проект был закрыт [20].
а

б
Рис. 1.12. Кольцеплаи С‑450 фирмы SNECMA (Франция, 1959): а – проект аппарата; б – С‑450 в режиме вертикального висения
Однако в наши дни кольцепланы получили новое развитие, но уже в виде беспилотных аппаратов. На рис. 1.13 показаны примеры многофункциональных БПЛА, выполненных по схеме кольцеплана. Кольцевое замкнутое крыло имеет свои преимущества (нет срыва потока по краям, допускаются очень большие углы атаки, большая маневренность, большая прочность и меньшая масса крыла, хорошее соотношение массы полезной нагрузки к общей массе аппарата).

а

б
Рис. 1.13. Беспилотные кольцепланы: а – FanTail фирмы ST Aerospace (Сингапур, 2006); б – Air 250 – разработка ООО "Группа Эйр" (Россия, 2010)
Приведенные в качестве примеров на рис. 1.13 БПЛА предназначены, в первую очередь для видеонаблюдения, причем они могут работать в сложных условиях – внутри строений, лесных массивов, горных ущелий и пещер: защищенность вентилятора корпусом‑крылом делает эксплуатацию безопасной и устойчивой к контакту с препятствиями. Вертикальный взлет/посадка делают возможным применение БПЛА с ограниченных площадок и транспортных средств. Оба аппарата работают от двигателей внутреннего сгорания (в российском предусмотрен также вариант с электромотором и аккумулятором) и могут развивать горизонтальную скорость порядка 150 км/ч.
В последние годы появляются сообщения о возобновившихся и небезнадежных попытках создать самолет обычного (не вертикального) способа взлета/посадки с замкнутым крылом. Группа энтузиастов в Белоруссии в 2007 г. испытала самолет с таким крылом. Выяснено, что в поперечном сечении он должен иметь не кольцевую форму, а форму эллипса. Прототип оказался в воздухе очень стабильным, маневренным и экономичным, а длина его пробега по ВПП при взлете/посадке заметно короче, чем, например у биплана такого же размера. Можно ожидать, что вскоре появятся и беспилотные самолеты, реализующие описанную концепцию [21].
СВВП с горизонтальным положением фюзеляжа на взлете/ посадке исторически раньше были реализованы в военной пилотируемой авиации. Наиболее известные СВВП этого класса – это серийно производимые штурмовики: советский Як‑38 разработки ОКБ им. Яковлева и американский AV‑8B Harrier разработки фирмы McDonnell Douglas (рис. 1.14). Силовая установка Як‑38 состоит из одного реактивного подъемно‑маршевого двигателя и двух подъемных двигателей, а у AV‑8B она состоит из одного мощного подъемно‑маршевого двигателя. Управление вектором тяги при смене режима полета осуществляется с помощью поворотных реактивных сопел [22]. Главное достоинство таких СВВП очевидно – возможность базирования на ограниченных по площади полосах, в частности, на палубах авианосцев. Кроме того, СВВП обладают дополнительными преимуществами, а именно возможностью зависания, разворота в этом положении и полёта в боковом направлении. По отношению к другим вертикально взлетающим летательным аппаратам, например, вертолётам, СВВП обладают несравненно большими скоростями и в целом преимуществами, свойственными летательным аппаратам с неподвижным крылом. Недостатками таких самолетов являются сложность управления и энергетическая неэффективность.

а

б
Рис. 1.14. Серийные пилотируемые самолеты с вертикальным взлетом и посадкой: а – советские штурмовики Як‑38 на борту тяжёлого авианесущего крейсера "Новороссийск" (Тихоокеанский флот, 1984); б – штурмовик AV‑8B Harrier Корпуса морской пехоты США на взлете в аэропорту г. Фритаун (Сьерра‑Леоне, 2003)
Беспилотные СВВП с горизонтальным положением фюзеляжа на взлете/посадке стали появляться только в последние 10 лет. Один из примеров – разработка американской компанией American Dynamics военного беспилотного СВВП BattleHog 100х (рис. 1.15).
Летные испытания БПЛА BattleHog 100х прошли в 2006 г. Аппарат мог находиться в воздухе непрерывно до 8 часов. Длина BattleHog 100х составляет 3,8 м, размах крыльев – 5,2 м, высота – 1,5 м, максимальный взлетный вес – 1450 кг, полезная нагрузка – 340 кг, потолок высоты – около 7 тыс. м, максимальная скорость – 500 км/ч, крейсерская – 330 км/ч. Расчет станции управления – от 1 до 3 чел. Дальность передачи данных по каналу прямой видимости – около 250 км. BattleHog 100х оснащен турбовентиляторным двигателем Rolls Royce Т63‑А720. Аппарат может действовать как в режиме вертикального взлета и посадки, так и в режиме обычного самолетного взлета и посадки [23]. Разработка BattleHog 100х была ориентирована на использование его в боях в городе или сильнопересеченной местности.


Рис. 1.15. Проект беспилотного СВВП BattleHog 100х фирмы American Dynamics (США, 2006)
Аппарат BattleHog 100х предположительно должен быть оснащен двумя ракетами HellFire, либо пусковыми установками НУРС и артиллерийской системой M134 . Бронирование кевларом призвано защитить подъемный вентилятор от пуль калибра 7,62 мм на дистанции до 50 м, а также от воздействия разрывов гранат в непосредственной близости от аппарата [24].
В ходе испытаний в лесу аппарат продемонстрировал возможность совершать полет ниже уровня верхушек деревьев, что позволяет обеспечить его крайне низкую заметность. Полет с огибанием рельефа местности, между деревьями или зданиями осуществляется с помощью модифицированного радара Raytheon. Управление летательным аппаратом осуществляется путем изменения скорости вращения и угла наклона подъемного вентилятора с высоким крутящим моментом (High Torque Aerial Lift, HTAL). Его применение, во‑первых, позволило резко уменьшить габариты роторов, "спрятав" их внутрь фюзеляжа, что одновременно позволило снизить их уязвимость от огня противника. С другой стороны, система HTAL позволила обеспечить BattleHog 100х не только высокую грузоподъемность, но и возможность вертикального взлета и посадки, зависания и полета с предельно малыми скоростями, а также, по заверению разработчиков, уникальную маневренность аппарата без использования аэродинамических управляющих поверхностей – рулей поворота и элеронов (что также снижает уязвимость) или сложных систем управления вектором тяги, используемых в современных военных СВВП.
Другим примером беспилотного СВВП с горизонтальным расположением фюзеляжа является аппарат Excalibur американской фирмы Aurora Flight Sciences (рис. 1.16). Он имеет разворачиваемый подъемно‑маршевый газотурбинный двигатель, а для управления положением используются электрические импеллеры, расположенные в крыльях и носовой части. Данный БПЛА также предназначен для применения в качестве штурмовика и рассчитан на подвеску различного ракетного и стрелкового вооружения [25].
И еще один пример БПЛА этого же подкласса – аппарат V‑STAR компании Frontline Aerospace (США). Он имеет несколько модификаций, некоторые из которых показаны на рис. 1.17.
V‑STAR проектировался как боевая машина универсального применения: для разведки, слежения, целеуказания и поиска; для ударов по наземным объектам с помощью устанавливаемого на борту оружия; для доставки на поле боя и за линию фронта оружия, боеприпасов, продовольствия, медикаментов и т.д.; для эвакуации раненых и др. За свои эксплуатационные характеристики БПЛА V‑STAR получил неофициальное название "Humvee of the air" ("воздушный хаммер" – по аналогии с известным американским вездеходом). Основные особенности этого аппарата [26]:

Рис. 1.16. БПЛА Excalibur – разработка американской фирмы Aurora Flight Sciences (США, 2009)
– 2 компактных газотурбинных двигателя Rolls‑Royce 250. Передача движения осуществляется как на подъемный вентилятор, расположенный в центре фюзеляжа, так и на маршевый толкающий вентилятор в хвостовой части. При выходе из строя одного двигателя аппарат может продолжить полет и совершить посадку на оставшемся. В штатном режиме оба двигателя работают одновременно лишь на взлёте, когда нужно оторвать аппарат от земли. При горизонтальном полёте маршевый вентилятор приводит во вращение лишь один двигатель, а второй в это время не работает, экономя топливо;
– особая технология энергосбережения делает аппарат эффективным при перевозке грузов и пригодным для длительных полетов на дальние расстояния: V‑STAR рассчитан на перевозку грузов до 180 кг при максимальном взлетном весе 1,06 т. Наибольшая скорость 533 км/ч. Дальность полёта 1316 км с полной нагрузкой, при уменьшении массы груза до 15 кг дальность увеличивается до 5570 км. Длительность полета (при нагрузке 50 кг) составляет порядка 20 ч;

а

б

в

г
Рис. 1.17. БПЛА V‑STAR компании Frontline Aerospace (США, 2009): а – базовая модель; б – модификация с увеличенной продолжительностью и дальностью полета; в – V‑STAR в полете; г – компоновка БПЛА
– груз в машине располагается в центре тяжести агрегата (внутри цилиндрического отсека, вокруг которого вращаются лопасти подъёмного вентилятора), поэтому загрузка/разгрузка не нарушает центровки аппарата;
– особая конструкция крыльев. Основные крылья – ромбовидная "этажерка", которая обеспечивает устойчивый горизонтальный полет, и в то же время не ограничивает скороподъемность. На законцовках могут раскладываться дополнительные короткие крылья для увеличения грузоподъемности на малой скорости;
– вертикальные взлет/посадка или обычные самолетные взлет/посадка с укороченным пробегом по полосе. В полете – способность быстро переключаться от медленного барражирования к мгновенному броску в сторону цели;
– БПЛА V‑STAR имеет очень высокий показатель транспортной результативности, который вычисляется как произведение скорости, дальности полёта и полезной нагрузки, деленное на полный взлётный вес. По этому показателю аппарат опережает многие БПЛА самолетного и вертолетного типов.
В заключение темы аппаратов самолетного типа с вертикальным взлетом и посадкой необходимо упомянуть о существовании еще одного особого вида БПЛА – аппаратах с жестким зонтообразным крылом, основанных на эффекте Коанды. Хотя эти аппараты мало похожи на самолеты, по принципу полета они все же больше всего соответсвуют этой классификационной группе.
Эффект Коанды – физическое явление, названное так, потому что в 1932 году румынский учёный Анри Коанда обнаружил, что поток жидкости или газа стремится отклониться по направлению к стенке тела с криволинейной поверхностью и при определенных условиях прилипает к ней, вместо того, чтобы продолжать движение в начальном направлении. Действие эффекта Коанды проявляется тогда, когда подача слоя воздуха на поверхность производится через узкую щель. Этот тонкий скоростной слой захватывает окружающий воздух. В итоге создается т.н. настилающая струя – полуограниченная струя, которая всегда развивается только вдоль поверхности ограждения. Дальность распространения настилающей струи увеличивается приблизительно в 1,2 раза по сравнению со стеснённой струей (т.е. струей, ограниченной со всех сторон, как в трубе). Таким образом, струя, которая настилается на поверхность, имеет большую дальнобойность при остальных одинаковых условиях, чем струя ненастилающая [27].
Летательный аппарат на эффекте Коанды устроен довольно просто: над зонтообразной поверхностью установлен вентилятор или реактивный двигатель, создающий поток воздуха, выходящий через узкую щель и настилающий криволинейную поверхность. Результаты моделирования скорости потока показаны на рис. 1.18.
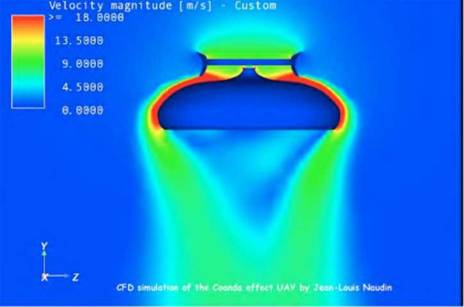
Рис. 1.18. Результаты моделирования скорости воздушного потока вдоль зонтообразной поверхности (по материалам исследований Jean‑Louis Naudin, 2006)
В последние годы ряд исследователей и фирм провели достаточно удачные эксперименты по реализации эффекта Коанды применительно к построению БПЛА. Так, в Великобритании фирмой AESIR [28] испытан экспериментальный аппарат Embler, демонстрирующий возможности использования эффекта. Аппарат выполнен из углепластикового корпуса. Привод вентилятора – электромотор. Аппарат может находиться в воздухе до 10 мин. Управление направлением движения в этом БПЛА осуществляются с помощью управляемых заслонок в выходной щели вентиляторного канала (управление рысканьем), а также с помощью четырех закрылков у кромки зонтообразной поверхности (управление креном и тангажом).

Рис. 1.19. БПЛА Embler компании AESIR, принцип полета которого основан на эффекте Коанды (Великобритания, 2009)
Компания AESIR объявила также о своих планах построения целой линейки аппаратов на эффекте Коанды [29]. Они отличаются своими размерами и грузоподъемностью. Самый крупный из них, названный Hoder, показан на рис. 1.20. Этот БПЛА имеет 2 вентиляторных движителя, приводимых в движение от двигателей внутреннего сгорания. Угол расположения лопаток вентиляторов сделан регулируемым. В отличие от прототипа, показанного на рис. 1.19, у БПЛА Hoder обтекаемые поверхности сделаны вообще без всяких аэродинамических элементов управления. А управление движением осуществляется путем изменения соотношения параметров вращения и углов лопаток вентиляторов. Собственная масса аппарата 1500 кг, масса полезной нагрузки 500 кг. БПЛА предназначен для выполнения локальных транспортных миссий продолжительностью до 8 ч. Такой аппарат имеет преимущество при использовании по сравнению с обычными вертолетами в городских условиях, лесистой и горной местности, где велика вероятность повреждения несущего винта вертолета. У предлагаемого аппарата небольшие столкновения с препятствиями не могут нарушить его работу.

а

б
Рис. 1.20. Перспективный БПЛА Hoder компании AESIR (Великобритания, 2009): а – общий вид аппарата; б – выставочный образец
Дата добавления: 2016-01-30; просмотров: 5525;