Гираторные схемы индуктивностей
| Исходная схема | Гираторная схема | Значение параметров |
| 
| 
|

| 
|
|
| 
|
|
| 
| 


|
| 
|
|
| 
| 
|
Контрольные вопросы
1. Назначение и виды преобразователей сопротивлений, конверторы и
инверторы сопротивлений и проводимостей, их вольтамперные характеристики. Применение в технике?
2. Моделирование преобразователей сопротивлений и проводимостей на управляемых источниках напряжения или тока: - структурные схемы конверторов, основные соотношения, реализуемость положительных и отрицательных значений сопротивлений?
3. Моделирование преобразователей сопротивлений и проводимостей на управляемых источниках напряжения или тока: - структурные схемы инверторов, основные соотношения, реализуемость положительных и отрицательных значений сопротивлений?
4. Реализация конверторов сопротивлений на управляемых источниках – структурные схемы, основные соотношения, практическое применение?
5. Реализация инверторов сопротивлений на управляемых источниках – структурные схемы, основные соотношения, практическое применение?
6. Устойчивость активных преобразователей сопротивлений и их применение в технике?
Лекция 11. Дифференцирующие и
интегрирующие устройства
Назначение и виды дифференцирующих и интегрирующих устройств [1,2,6,8,9,10]. Дифференцирующим устройством (ДУ) называют такое устройство, сигнал на выходе которого пропорционален производной от входного сигнала, т. е.
 , (11.1)
, (11.1)
где τд— коэффициент пропорциональности, имеющий размерность времени.
Простейшее дифференцирующее устройство может быть выполнено на конденсаторе или катушке индуктивности. Для конденсатора, имеющего емкость Сд, напряжение и ток связаны соотношением (рис.11.1,а):
 , (11.2)
, (11.2)
т. е. ток в цепи пропорционален производной от входного напряжения.
 Рис.11.1. Ёмкостные дифференцирующие устройства с выходным током (а) и выходным
Рис.11.1. Ёмкостные дифференцирующие устройства с выходным током (а) и выходным
напряжением (б)
Однако непосредственно использовать эту схему нельзя, так как в ней отсутствует элемент, с которого можно снять выходной сигнал, пропорциональный току ic(t). Для того, чтобы получить выходной сигнал в виде напряжения, последовательно с конденсатором включают резистор с сопротивлением Rд, т. е. переходят к схеме последовательного соединения емкости Сд и датчика тока с сопротивлением Rд, как показано на рис.11.1,б. Введение сопротивления Rд превращает эту цепь в квазидифференцирующую, так как теперь напряжение ивх(t)≠ис(t).
Действительно, для схемы, приведенной на рис. 11.1,б, можно записать, что
 , (11.3)
, (11.3)
где RдСд=τд, - постоянная времени дифференцирующего устройства.
Погрешность дифференцирования будет малой, если выполняется условие uвых<<uвх, что эквивалентно Rд ®0. В пассивных цепях это условие невыполнимо, поэтому приходится использовать электронные схемы.
Для схемы с индуктивностью Lд можно записать уравнение
 ,
,
откуда следует, что входной сигнал надо подавать в виде тока iвх(t), а не напряжения uвх(t), как показано на рис.11.2,а.
 Рис.11.2. Индуктивные дифференцирующие устройства с входным током (а) и
Рис.11.2. Индуктивные дифференцирующие устройства с входным током (а) и
входным напряжением (б)
Для того, чтобы преобразовать источник входного напряжения в источник тока, нужно последовательно с ним включить очень большое сопротивление rд®∞. Однако такая цепь снова станет квазидифференцирующей, а напряжение на индуктивности будет весьма малым (рис.11.2,б). В пассивных цепях это также невыполнимо, что приводит к необходимости использовать активные цепи.
Интегрирующим устройством (ИУ) называют такое устройство, сигнал на выходе которого пропорционален интегралу от входного сигнала, т. е.
 ,(11.4)
,(11.4)
где τи — коэффициент пропорциональности, имеющий размерность времени.
Простейшие интегрирующие устройства также можно выполнить на конденсаторе или катушке индуктивности. Схема простейшего интегрирующего устройства на конденсаторе приведена на рис.11.3,а. Для этой схемы можно записать уравнение, связывающее напряжение и ток, в виде:
 (11.5)
(11.5)
откуда следует, что напряжение на емкости Си пропорционально входному току iвх, т. е. входной сигнал должен быть задан в виде тока.
 Рис.11.3. Ёмкостные интегрирующие устройства с входным током (а) и выход-
Рис.11.3. Ёмкостные интегрирующие устройства с входным током (а) и выход-
ным напряжением (б)
Если же входной сигнал задан в виде напряжения uвх, то для преобразования его в ток необходимо последовательно с источником напряжения включить очень большое сопротивление Rи®∞. При этом выходное напряжение (рис.11.3,б) не будет соответствовать формуле (11.4):
 , (11.6)
, (11.6)
и схема будет квазиинтегрирующей, где RиCи=τи постоянная времени интегратора. Погрешность интегрирования будет малой, если выполнить условие uвых<<uвх, что эквивалентно Rи®∞. Поскольку в пассивных цепях это условие выполнить нельзя, то на практике применяют активные электронные схемы.
Схема интегрирующего устройства на индуктивности Lи приведена на рис.11.4, а. Для этой схемы можно написать уравнение
 , (12.7)
, (12.7)
из которого следует, что выходным сигналом является ток iL=iвых. Так как токовый сигнал нужно преобразовать в выходное напряжение, то последовательно с индуктивностью включается сопротивление rи, напряжение на котором и является выходным ur=uвых.
 Рис.11.4. Индуктивные интегрирующие устройства с выходным током (а) и выходным напряже-
Рис.11.4. Индуктивные интегрирующие устройства с выходным током (а) и выходным напряже-
нием (б)
Введение сопротивления rи делает эту цепь квазиинтегрирующей, и для снижения погрешности выбирается rи®∞, что приводит к малому значению выходного напряжения. Тем не менее индуктивные интеграторы находят применение, особенно в трансформаторном включении, когда выходное напряжение снимается не с сопротивления rи, а со вторичной обмотки трансформатора, индуктивно связанной с интегрирующей обмоткой.
Рассмотрение простейших дифференцирующих и интегрирующих цепей показывает, что для снижения погрешностей и получения выходного напряжения достаточно высокого уровня необходимо использовать активные устройства.
Переходные и частотные характеристики дифференцирующих и интегрирующих устройств. Переходная характеристика емкостного дифференцирующего устройства может быть найдена из решения дифференциального уравнения (11.3) для схемы, изображенной на рис.11.1,б, при условии, что на входе действует скачок напряжения в 1В, т.е. uвх(t)=1(t). Дифференциальное уравнение цепи
 (11.7)
(11.7)
при duвх/dt=0 позволяет найти переходную характеристику в виде
 ,
,
где τд=CдRд - постоянная времени дифференцирующего устройства. График hд(t) приведен на рис.11.5,а. Очевидно, что при уменьшении сопротивления Ra длительность импульса hд(t) также уменьшается.
Частотную характеристику дифференцирующего устройства можно построить, если положить, что на входе устройства действует гармоническое напряжение  . В этом случае по формуле (11.3) находим:
. В этом случае по формуле (11.3) находим:
 Рис.11.5. Переходная (а) и амплитудно-частотная (б) характеристики дифференцирующего устройства
Рис.11.5. Переходная (а) и амплитудно-частотная (б) характеристики дифференцирующего устройства
 ,
,
откуда получаем значение комплексной передаточной функции
 ,
,
где Hд(ω) — амплитудно-частотная характеристика цепи (рис. 11.5,б), а φд(ω) - фазо-частотная характеристика.
Для интегрирующего устройства, изображенного на рис.11.3,б, можно записать дифференциальное уравнение
 , (11.8)
, (11.8)
которое позволяет найти переходную характеристику ИУ в виде
 ,
,
где τи=CиRи — постоянная времени интегрирующего устройства.
Комплексная передаточная функция ИУ определяется выражением  ,
,
 где Hи(ω) и φи(ω) — амплитудно- и фазо-частотные характеристики ИУ. Графики переходной и амплитудно-частотной характеристик ИУ приведены на рис.11.6.
где Hи(ω) и φи(ω) — амплитудно- и фазо-частотные характеристики ИУ. Графики переходной и амплитудно-частотной характеристик ИУ приведены на рис.11.6.
Рис.11.6. Переходная (а) и амплитудно-частотная (б) характеристики интегрирующего уст-
ройства
Емкостные интеграторы с операционными усилителями. Идеальный интегратор с операционным усилителем можно представить в виде схемы, изображением на рис.11.7,а. Если усилитель обладает характеристиками идеального ОУ т.е. имеет бесконечно большое усиление (Ки—>∞), неограниченную полосу пропускания, бесконечно большое входное и бесконечно малое выходное сопротивления, то эквивалентную схему идеального интегратора можно представить в виде, изображенном на рис.11.7,б.
 Рис.11.7. Емкостный интегратор с ОУ (а) и его схема замещения (б)
Рис.11.7. Емкостный интегратор с ОУ (а) и его схема замещения (б)
Передаточная функция такого интегратора определяется формулой
 ,(11.9)
,(11.9)
где τи=CиRи — постоянная времени интегратора.
Переходная характеристика идеального интегратора (реакция на единичный скачок напряжения на входе) в соответствии с (11.3) имеет вид
 , (11.10)
, (11.10)
т. е. при скачкообразном напряжении на входе выходное напряжение интегратора изменяется по линейному закону, как показано на рис.11.8,а.
Частотная характеристика идеального интегратора определяется по его передаточной функции (11.9) при замене p на jω:
 , (11.11)
, (11.11)
где Hи(ω) = (ωτи)-1 — амплитудно-частотная характеристика, φи(ω) = 90o — фазовый сдвиг для всех спектральных составляющих входного сигнала.
Графики амплитудно- и фазо-частотной характеристик идеального интегратора приведены на рис.11.8,а и б. Амплитудно-частотная

Рис.11.8. Переходная характеристика (а) и амплитудно-частотная характеристика (б) интегратора с ОУ
характеристика в логарифмическом масштабе представлена прямой линией со спадом 20 дБ на декаду, а фазо-частотная характеристика — горизонтальной прямой линией φи = 90°. В действительности отличие характеристики реального ОУ от характеристик идеального ОУ приводит к значительному изменению свойств емкостного интегратора. Во-первых, реальный ОУ имеет конечный коэффициент усиления Ки<∞. Во-вторых, входное и выходное сопротивления ОУ также имеют конечные значения, что особенно сильно сказывается при интегрировании малых токов от источников с большим выходным сопротивлением. И, наконец, операционный усилитель имеет динамические характеристики, существенно отличные от идеальной модели. Одновременный учет всех этих особенностей реального ОУ приводит к очень сложной схеме замещения, поэтому рассмотрим только влияние ограниченного значения коэффициента усиления ОУ, которое будем считать равным Ки.
Пользуясь схемой замещения, приведенной на рис.11.7,б, найдем
 ,
,
где φ1 — напряжение на входе усилителя.
Напряжение на выходе усилителя uвых=-Kuφ1, а напряжение на конденсаторе ис можно найти как разность φ1 и uвых :
 .
.
В результате определим напряжение на входе ОУ: φ1 = uc/(1 +Кu). Так как входной ток ОУ принимаем равным нулю, то ток i=C(duc/dt), и в результате получаем уравнение для интегратора в виде:
 или
или  .(11.12)
.(11.12)
Если сравнить полученное уравнение с уравнением для пассивного RC интегратора (11.8)
 ,
,
то можно сделать вывод, что интегратор на ОУ эквивалентен такой RC-цепи, у которой постоянная времени τэ = (1+Ku)RиCи в (1+Кu) раз больше постоянной времени пассивного интегратора и, кроме того, эквивалентное действующее напряжение на входе интегратора тоже увеличено в (1+Кu) раз. Начальная скорость изменения напряжения на конденсаторе осталась неизменной, так как

 .
.
Рис.11.9. Переходная характеристика интег-
ратора на ОУ с ограниченным усилением
На рис.11.9 приведены переходные характеристики пассивной RС - цепи и активного интегратора на ОУ с ограниченным усилением, из сравнения которых можно сделать вывод, что погрешность активного интегратора значительно меньше пассивного даже при ограниченном усилении ОУ.
Интеграторы малых и сверхмалых токов. Измерение малых токов, электрических зарядов и сопротивлений изоляции связано с интегрированием очень малых токов, так как непосредственное измерение этих токов или зарядов весьма затруднительно. При этом используется определение заряда на образцовом конденсаторе Ск, создаваемого током Iи за некоторое время tи. Чувствительность таких устройств тем выше, чем меньше емкость образцового конденсатора Ск и чем за большее время tи выполняется интегрирование.
Для снижения входного сопротивления интеграторов тока и снижения погрешности образцовый конденсатор Ск включают в цепь отрицательной обратной связи, как показано на рис.11.10, где Ки — коэффициент усиления, β — коэффициент передачи цепи обратной связи. Применение конденсатора в качестве образцового элемента позволяет достичь более высокой точности, так как погрешность аттестации и нестабильность емкости образцовых конденсаторов значительно меньше, чем для высокоомных резисторов, которые используются для этой же цели.

Рис.11.10. Схема интегратора малых токов
Простейшие интеграторы тока представляют собой циклические устройства, в которых после каждого цикла заряда накопительного конденсатора Ск требуется возвращение схемы в исходное состояние, т. е. требуется разряд интегрирующего конденсатора. Иногда для получения текущего значения тока на выходе интегратора включают дифференцирующее устройство в виде простейшей RС - цепи или операционного дифференцирующего усилителя.
Для того чтобы в схеме соблюдался режим интегрирования, необходимо выполнение условия tи<<τвх , где τвх = Cвх/gвх — постоянная времени входной цепи интегратора. При большом коэффициенте усиления τвх почти полностью определяется постоянной времени цепи обратной связи
Выходное напряжение интегратора при ступенчатом токе Iи определяется его переходной характеристикой
 .(11.13)
.(11.13)
При большой постоянной времени τвх>>tи это выражение можно разложить в степенной ряд Тейлора и, ограничиваясь двумя членами ряда, записать выходное напряжение в виде
 , (11.14)
, (11.14)
где δτ = tи/2τвх — погрешность нелинейности интегратора.
Эта погрешность интегратора уменьшается с увеличением постоянной времени входной цепи. Однако максимальное значение τвх не может превышать постоянной времени цепи обратной связи Cк/gк.
Для получения выходного напряжения, пропорционального текущему значению входного тока Iи, можно использовать дифференцирующее устройство, установленное на выходе интегратора. Схема интегратора тока с дифференцирующим звеном приведена на рис. 11.11.

Рис.11.11. Интегратор тока с дифферен -
цирующим звеном
Для схемы интегратора тока с дифференцирующим звеном можно получить значение выходного напряжения, аналогичное (11.14), при условии замены tи на τд:
 . (11.15)
. (11.15)
Сравнивая выражения (11.15) и (11.14), можно сделать вывод, что чувствительность интегратора с дифференцирующим звеном на выходе интегратора ниже, так как τд<tи.
Как уже отмечалось, в интеграторах малых токов используют интегрирующие конденсаторы малой емкости (от 10 до 50 пФ). Это позволяет увеличить чувствительность интегратора, но снижает допустимое время интегрирования. Для увеличения времени интегрирования применяют автоматическую компенсацию зарядного тока.
Схема интегратора с автокомпенсацией зарядного тока приведена на рис.11.12. Выходное напряжение интегратора через интегрирующую цепь RиСи подводится к образцовому конденсатору Ск, создавая компенсирующий ток.
Коэффициент передачи звена обратной связи имеет значение

Рис.11.12. Интегратор тока с автокомпенсацией зарядного тока
 ,
,
где τи = RиCи — постоянная времени интегрирующей цепи.
При достаточно большой постоянной времени τи интегрирующего звена обратной связи время интегрирования увеличивается больше, чем в два раза. Постоянная времени интегратора тока определяется в основном качеством интегрирующего конденсатора Ск. При использовании конденсаторов с воздушным диэлектриком проводимость утечки gк в основном определяется опорными изоляторами, к которым крепятся пластины конденсатора, как показано на рис. 11.13,а.

Рис.11.13. Способы включения накопительного конденсатора: без охранного электрона (а) и с охранным электро -
дом (б)
Для увеличения постоянной времени интегратора при использовании конденсаторов с воздушным диэлектриком можно применить охранный электрод, который отводит токи утечки по опорному изолятору на корпус. Охранный электрод помещается между опорными изоляторами и соединяется с общей шиной усилителя, как показано на рис.11.13,б. При этом проводимость gк между входным опорным изолятором и охранным электродом оказывается включенной параллельно g1 , а постоянная времени интегратора увеличивается примерно в Киβ раз.
Конструктивное выполнение конденсаторов интегратора малых токов с охранным электродом приведено на рис.11.14. Наибольшее распространение получили конденсаторы с односторонними выводами, изображенные на рис.11.14,а, и конденсаторы с двухсторонними выводами, изображенные на рис.11.14,б. Охранное кольцо размещается на стороне выхода интегратора и подключается к общему проводу. Основные характеристики накопительного конденсатора типа НК-2, используемого в интеграторе электрометра ВК2-16, имеют следующие значения: Ск=100пФ; Rиз=1015Ом, погрешность 1%.
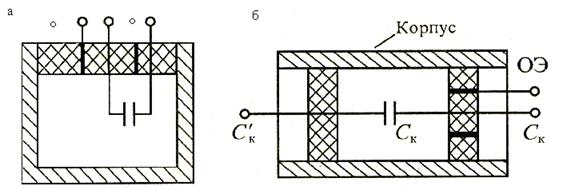
Рис.11.14. Конструкции конденсаторов с охранным электродом: с односторонними выводами (а) и с двусторонними выводами (б)
Дифференцирующие устройства на операционных усилителях. Идеальное дифференцирующее устройство с операционным усилителем можно представить в виде схемы, изображенной на рис. 11.15,а. Схема замещения дифференцирующего устройства с идеальным ОУ приведена на рис.11.15,б.
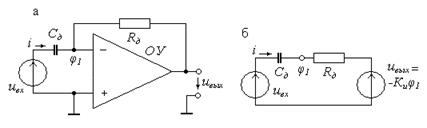
Рис.11.15. Емкостное дифференцирующее устройство на ОУ (а) и его
схема замещения (б)
Передаточная функция такого ДУ определяется формулой
 ,
,
откуда  , (11.16)
, (11.16)
где  - постоянная времени дифференцирующего устройства.
- постоянная времени дифференцирующего устройства.
Переходная характеристика идеального ДУ в соответствии с (11.16) определяется зависимостью
 , (11.17)
, (11.17)
где δl(t) — импульсная функция первого рода. Таким образом, при скачкообразном напряжении на входе ДУ выходное напряжение будет иметь форму очень короткого импульса (теоретически его длительность равна нулю). График переходной характеристики ДУ приведен на рис.11.16,а.
Частотная характеристика ДУ определяется по его передаточной функции (11.16) при замене ρ=jω :
 ,
,
где  - амплитудно-частотная характеристика ДУ, а
- амплитудно-частотная характеристика ДУ, а  = -90° — фазовый сдвиг (фазо-частотная характеристика). Графики амплитудно-частотной и фазо-частотной характеристик ДУ приведены на рис.11.16,б.
= -90° — фазовый сдвиг (фазо-частотная характеристика). Графики амплитудно-частотной и фазо-частотной характеристик ДУ приведены на рис.11.16,б.
 Рис.11.16. Переходная характеристика (а) и амплитудно-частотная характеристика (б)
Рис.11.16. Переходная характеристика (а) и амплитудно-частотная характеристика (б)
дифференцирующего устройства на ОУ
Дифференциатор на реальном ОУ отличается от идеального ДУ тем, что его результирующая частотная характеристика имеет два полюса и один нуль, что указывает на возможность его самовозбуждения. При этом один полюс определяется собственной АЧХ ОУ. Для увеличения устойчивости дифференциатора параллельно Rд иногда включают корректирующий конденсатор Ск.
Полное входное сопротивление дифференциатора имеет емкостный характер, так как Zвх = (ωCд)-1, поэтому с увеличением частоты входное сопротивление уменьшается и растет ток, потребляемый ДУ от источника сигнала. Для ограничения входного тока последовательно с емкостью Сд можно включить сопротивление Rк. Полная схема ДУ с дополнительными корректирующими элементами приведена на рис.11.17.

Рис.11.17. Схема дифференциатора на ОУ с внешней коррекцией
Дифференцирующие устройства находят широкое применение в формирователях импульсов, в активных фильтрах, в генераторах колебаний и других случаях.
Контрольные вопросы
1. Ёмкостные и индуктивные дифференцирующие устройства – схемные реализации, основные соотношения, погрешности преобразования?
2. Ёмкостные и индуктивные интегрирующие устройства - схемные реализации, основные соотношения, погрешности преобразования?
3. Переходные и частотные характеристики дифференцирующих и интегрирующих устройств – основные соотношения, графические построения переходных и амплитудно-частотных характеристик?
4. Ёмкостные интеграторы с операционными усилителями – схемная реализация, основные соотношения, графики переходной, амплитудно- и фазо-частотной характеристик.
5. Интеграторы малых и сверхмалых токов – схемные реализации, основные соотношения, сравнительные данные по конструктивным исполнениям.
6. Дифференцирующие устройства на операционных усилителях – схемная реализация, основные соотношения, переходная и амплитудно-частотная характеристики? Реализация внешней коррекции?
Дата добавления: 2016-01-29; просмотров: 1472;