В) Индуктивные сопротивления рассеяния обмоток.
Определение потокосцеплений рассеяния, а следовательно, и индуктивных сопротивлений рассеяния х1 и х2 представляет собой сложную задачу, точное решение которой не представляется возможным. Поэтому при практических расчетах довольствуются приближенными методами, достаточная точность которых подтверждается опытом.
Индуктивное сопротивление может быть представлено в следующем виде:
 . (3-163)
. (3-163)
Здесь угловая частота  , а индуктивность рассеяния
, а индуктивность рассеяния
 . (3-164)
. (3-164)
где  — некоторая расчетная проводимость для индукционных трубок поля рассеяния. Из (3-163) и (3-164) получаем:
— некоторая расчетная проводимость для индукционных трубок поля рассеяния. Из (3-163) и (3-164) получаем:
 . (3-165)
. (3-165)
Индукционные линии поля рассеяния, например статора, условно делят на три группы; в соответствии с этим различают три вида рассеяния: пазовое, дифференциальное и лобовых частей обмотки. Если ввести коэффициенты проводимости — пазового рассеяния  , дифференциального рассеяния
, дифференциального рассеяния  , и рассеяния лобовых частей
, и рассеяния лобовых частей  , отнесенные к единице длины статора или ротора l, то выражение (3-165) после ряда преобразований примет следующий вид, Ом:
, отнесенные к единице длины статора или ротора l, то выражение (3-165) после ряда преобразований примет следующий вид, Ом:
 , (3-166)
, (3-166)
где
 . (3-167)
. (3-167)
Коэффициент проводимости пазового рассеяния для диаметральных двухслойных обмоток (y =  ) и для однослойных обмоток зависит только от геометрических размеров паза. Его определяют по потокосцеплению индукционных линий, проходящих поперек паза, с проводниками, лежащими в пазу (рис. 3-52).
) и для однослойных обмоток зависит только от геометрических размеров паза. Его определяют по потокосцеплению индукционных линий, проходящих поперек паза, с проводниками, лежащими в пазу (рис. 3-52).
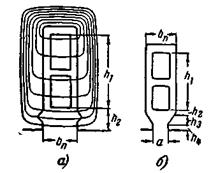
Рис. 3-52. К определению .
При этом пренебрегают магнитным сопротивлением индукционных трубок пазового поля рассеяния вне паза и считают, что сопротивление для них определяется только расстояниями между стенками паза в той части, где лежат проводники, и в части паза над проводниками. Очевидно, что это сопротивление будет тем меньше, чем больше глубина паза (h1 + h2 + h3 + h4) и чем меньше его ширина bп.
Для хордовых двухслойных обмоток (y < τ) коэффициент зависит также и от значения  , так как при
, так как при  < 1 в некоторых пазах находятся катушечные стороны, принадлежащие разным фазам (рис. 3-15), вследствие чего общее потокосцепление какой-либо катушечной стороны в этих пазах уменьшается. Следовательно, пазовое рассеяние при y < τ будет меньше, чем при y = τ.
< 1 в некоторых пазах находятся катушечные стороны, принадлежащие разным фазам (рис. 3-15), вследствие чего общее потокосцепление какой-либо катушечной стороны в этих пазах уменьшается. Следовательно, пазовое рассеяние при y < τ будет меньше, чем при y = τ.
Расчет производится по формулам:
(для паза по рис. 3-52,а);

(для паза по рис. 3-52,б), где  .
.
Для нормальных машин = 0,8  2.
2.
Коэффициент проводимости дифференциального рассеяния в большой степени зависит от числа пазов q1 (или q2). шага обмотки. Рассматриваемое рассеяние определяется потокосцеплениями, которые создают высшие гармоники поля, например, статора с его обмоткой. Они наводят в обмотке э.д.с. той же частоты, что и 1-я гармоника поля (§ 3-4,б). Практически они зависят только от тока статора и от проводимости воздушного зазора. Просуммировав указанные э.д.с. и разделив полученную сумму на ток, мы найдем сопротивление хд, соответствующее дифференциальному рассеянию (или высшим гармоникам поля). От хд мы можем перейти к коэффициенту . Его значение = 1 2,5. Оно тем меньше, чем больше число пазов q, длина воздушного зазора  и чем ближе у к 0,83 .
и чем ближе у к 0,83 .
Для упрощения расчетов иногда составляют эмпирические формулы, рассматривая вместо дифференциального рассеяния поле рассеяния между соседними коронками (внешними поверхностями) зубцов. Индукционные трубки этого поля проходят через воздушные зазоры и частично через коронки зубцов противолежащей части машины. Их магнитная проводимость определяется в основном длиной воздушного зазора .
Коэффициент проводимости рассеяния лобовых частей обмотке зависит от длины лобовой части. Его значение = 0,6 ¸ 1,5.
В относительных единицах измерения
 ;
;  . (3-168)
. (3-168)
Для нормальных машин  о.е.
о.е.
При больших скольжениях (s > 0,10), при которых обычно в обмотках имеют место большие токи, х1 и х2 несколько уменьшаются, так как уменьшаются и хд из-за насыщения тех стальных участков, по которым частично проходят индукционные трубки соответствующих полей рассеяния. Кроме того, х2 уменьшается из-за неравномерного распределения тока по сечению стержней обмотки ротора, с чем приходится считаться при глубоких пазах и высоких стержнях (§ 3-19,в).
3-17. Круговая диаграмма
Круговая диаграмма асинхронной машины представляет собой геометрическое место концов вектора тока  , изменяющегося при изменении скольжения s в пределах от + ∞ до -∞, если при этом напряжение на зажимах статора машины и все ее параметры сохраняют постоянные значения. Ее называют также диаграммой тока. Она дает наглядное представление о важных зависимостях между величинами, характеризующими работу асинхронной машины.
, изменяющегося при изменении скольжения s в пределах от + ∞ до -∞, если при этом напряжение на зажимах статора машины и все ее параметры сохраняют постоянные значения. Ее называют также диаграммой тока. Она дает наглядное представление о важных зависимостях между величинами, характеризующими работу асинхронной машины.
Обратимся к схеме замещения, представленной на рис. 3-49. Введем обозначение:
 . (3-169)
. (3-169)
Тогда в соответствии со схемой замещения и уравнениями (3-120) и (3-121) можем написать:
 . (3-170)
. (3-170)
Комплексный коэффициент C1 согласно (3-126) равен:
 , (3-171)
, (3-171)
где
 (3-172)
(3-172)
и
 . (3-173)
. (3-173)
Подставив в (3-170) значение C1 по (3-171), будем иметь:

что после преобразований дает:
 , (3-174)
, (3-174)
где
 ; (3-175)
; (3-175)
 . (3-176)
. (3-176)
Разделив (3-174) на  , получим:
, получим:
 . (3-177)
. (3-177)
Три вектора полученного уравнения токов образуют при токе  , соответствующем некоторому скольжению s, прямоугольный треугольник AcAD, представленный на рис. 3-53, где вектор
, соответствующем некоторому скольжению s, прямоугольный треугольник AcAD, представленный на рис. 3-53, где вектор  направлен по вертикали. В этом треугольнике катеты
направлен по вертикали. В этом треугольнике катеты  и
и  , и гипотенуза
, и гипотенуза  (в соответствии с обычными соотношениями между параметрами асинхронной машины принято, что угол γ1 имеет отрицательное значение).
(в соответствии с обычными соотношениями между параметрами асинхронной машины принято, что угол γ1 имеет отрицательное значение).
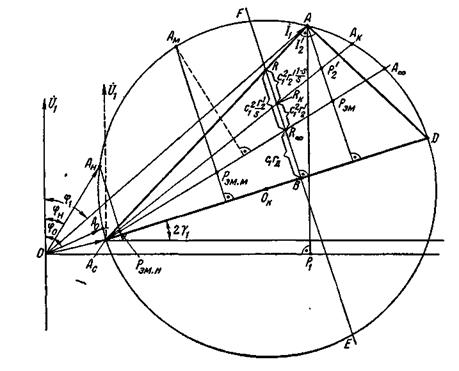
Рис. 3-53. Круговая диаграмма асинхронной машины.
При  отрезок
отрезок  . Поэтому конец вектора (вершина прямого угла А) при изменении скольжения s опишет окружность, имеющую диаметр
. Поэтому конец вектора (вершина прямого угла А) при изменении скольжения s опишет окружность, имеющую диаметр
 . (3-178)
. (3-178)
Прибавив к вектору  постоянный вектор
постоянный вектор  получим вектор первичного тока
получим вектор первичного тока  . Отсюда следует, что конец вектора тока
. Отсюда следует, что конец вектора тока  при изменении s будет скользить по той же окружности, что и вектор
при изменении s будет скользить по той же окружности, что и вектор  .
.
Отложим в произвольном масштабе  ; тогда в том же масштабе
; тогда в том же масштабе  , так как треугольник сопротивлений AcBR и треугольник токов AcAD подобны. Отрезок AcR в масштабе сопротивлений, очевидно, равен
, так как треугольник сопротивлений AcBR и треугольник токов AcAD подобны. Отрезок AcR в масштабе сопротивлений, очевидно, равен  . Теперь разделим отрезок
. Теперь разделим отрезок  на части:
на части:
 ;
;
 ;
;
 .
.
При уменьшении s точка R. будет скользить вверх по прямой EF; соответствующая точка А будет скользить по окружности влево.
При s = 0 точка R уходит в бесконечность, точка А совпадает с точкой Aс, и мы получаем ток синхронизма  .
.
При увеличении s точка R смещается вниз и точка А скользит вправо; при s = l точка R совпадает с точкой Rк, а точка А — с точкой Ак. Режим работы асинхронной машины при s = 1 по аналогии с трансформатором называется режимом короткого замыкания. Ток  (не показан на рис. 3-5З) — ток короткого замыкания.
(не показан на рис. 3-5З) — ток короткого замыкания.
Дуга АcААк соответствует работе машины двигателем, так как по ней будет скользить ток при изменении s от 0 до 1. При дальнейшем увеличении s от 1 до + ∞ точка R перемещается вниз, точка А — вправо и при s = + ∞ точка R попадает в точку R∞, а точка А — в точку А∞. Малая дуга АкА∞соответствует изменению s от 1 до + ∞ и, следовательно, работе машины тормозом.
При s = -∞ точка R также совпадает с точкой R∞, а точка А — с точкой A∞. При отрицательном s и при его уменьшении по абсолютной величине точка R скользит вниз от R∞, а точка А — вниз от A∞. При s = 0, как отмечалось, точка А совпадает с точкой Aс. Дуга A∞EAc с соответствует изменению s от - ∞ до 0 и, следовательно, работе машины генератором.
Полученная диаграмма позволяет найти для любого тока I1 соответствующий ему cosφ1. Из диаграммы мы можем также получить ряд других величин, характеризующих работу машины.
Проведем через точку А перпендикулярно оси абсцисс отрезок  . Пусть при построении круговой диаграммы был выбран масштаб для тока СI , A/мм. Тогда
. Пусть при построении круговой диаграммы был выбран масштаб для тока СI , A/мм. Тогда  ; где измеряется в миллиметрах. Умножив полученный активный ток статора на число фаз m1 и напряжение U1, получим электрическую мощность статора:
; где измеряется в миллиметрах. Умножив полученный активный ток статора на число фаз m1 и напряжение U1, получим электрическую мощность статора:
 , (3-179)
, (3-179)
где масштаб для мощности, Вт/мм,
 . (3-180)
. (3-180)
Таким образом, перпендикуляр из любой точки диаграммы тока на ось абсцисс, измеренный в масштабе мощности, равен электрической мощности статора. Поэтому ось абсцисс называется линией электрических мощностей P1.
Из подобия треугольников AcRRк и АсАP'2 следует:
 .
.
Умножив обе части равенства на масштаб мощности, получим:
или
 , (3-181)
, (3-181)
так как
 и
и  .
.
Следовательно, линия AcA∞ —линия механических мощностей  , развиваемых ротором.
, развиваемых ротором.
Аналогично из подобия треугольников AсRR∞ и AсAРэм следует:
 . (3-182)
. (3-182)
Следовательно, линия АcА∞ — линия электромагнитных мощностей Рэм; в то же время это есть линия электромагнитных вращающих моментов М, так как М равен мощности Рэм, деленной на синхронную угловую частоту  , Дж,
, Дж,
 (3-183)
(3-183)
или, кг·м,
 ,
,
где масштаб для момента., кг·м/мм,
 . (3-184)
. (3-184)
Отрезок  , измеренный в масштабе мощности, равен электрическим потерям в обмотке ротора:
, измеренный в масштабе мощности, равен электрическим потерям в обмотке ротора:
 . (3-185)
. (3-185)
Согласно (3-69) скольжение
 . (3-186)
. (3-186)
При небольших токах I1 (например, при I1 <  ) достаточно точное определение s по (3-186) затруднительно, поэтому для определения s применяют особое построение на диаграмме, рассмотренное в § 3-18,б.
) достаточно точное определение s по (3-186) затруднительно, поэтому для определения s применяют особое построение на диаграмме, рассмотренное в § 3-18,б.
При помощи диаграммы можно определить максимальный момент Мм. Для этого нужно параллельно линии моментов АсА∞ провести касательную к окружности и из точки касания Ам — перпендикуляр к диаметру  до пересечения с линией АcА∞, тогда получим, кг·м,
до пересечения с линией АcА∞, тогда получим, кг·м,
 .
.
Обычно асинхронные двигатели рассчитываются таким образом, чтобы cosφн при номинальной нагрузке был равен максимальному (или близок к максимальному). В этом случае ток статора  будет совпадать с касательной к окружности (или будет близок к ней). Номинальный момент Мн =
будет совпадать с касательной к окружности (или будет близок к ней). Номинальный момент Мн =  . Кратность максимального момента (способность к перегрузке)
. Кратность максимального момента (способность к перегрузке)
 .
.
Методы построения круговой диаграммы по расчетным или опытным данным и определение с ее помощью рабочих кривых двигателя, характеризующих его рабочие свойства, рассматриваются в § 3-18,б.
При построении рассмотренной круговой диаграммы было принято, что параметры асинхронной машины r1,  , x1,
, x1,  , r12, x12 остаются без изменения, а изменяется только скольжение s. Никаких других допущений не делалось. Поэтому представленная на рис. 3-53 диаграмма называется точной круговой диаграммой.
, r12, x12 остаются без изменения, а изменяется только скольжение s. Никаких других допущений не делалось. Поэтому представленная на рис. 3-53 диаграмма называется точной круговой диаграммой.
Для обычных случаев, как отмечалось, комплекс С1 можно заменить его модулем с1 и принять, следовательно, γ1 = 0. Тогда построение круговой диаграммы упрощается: ее диаметр расположится на линии, параллельной оси абсцисс; отрезки прямых, определяющие мощности и вращающие моменты, будут перпендикулярны к оси абсцисс. Такая упрощенная круговая диаграмма и используется при исследовании асинхронных машин, если угол γ1 не превышает примерно 2 3°.
На практике к точной круговой диаграмме приходится обращаться при исследовании: малых машин, имеющих относительно высокое значение r1; машин, работающих при низкой частоте тока [когда индуктивные сопротивления уменьшаются, а активные сопротивления практически остаются неизменными, что приводит согласно (3-173) к возрастанию γ1];
машин, работающих с большим активным сопротивлением, включенным последовательно с обмоткой статора.
3-18. Рабочие характеристики двигателей
Дата добавления: 2016-01-29; просмотров: 1710;