Телеизмерительные системы
Общие замечания
Системой телеизмерения называется совокупность устройств на приемной и передающей сторонах и канала связи для автоматического измерения одного или ряда параметров на расстоянии. Структурная схема представлена на рис. 5.27.

Рис. 5.27. Структурная схема телеизмерительной системы: ПП – первичные преобразователи, ООИ – блок обработки и отображения информации, КП – контрольные пункты, ПКС – преобразователи кодов и сигналов, КС – канал связи
Особенности построения
Можно указать следующие основные способы построения:
1. По виду модуляции: интенсивные(тока, напряжения) время-импульсные (ВИМ и ШИМ), частотные (ЧИМ и ЧМ), кодоимпульсные (двоичные и недвоичные), цифровые и КИС и адаптивные.
2. По виду телеизмеряемого параметра – аналоговые и цифровые.
3. По числу каналов связи: одноканальные и многоканальные.
4. По характеристики каналов связи: проводные и радиоканальные.
5. По виду телеизмерений: непрерывные по вызову и по выбору.
При этом могут производиться телеизмерения:
текущих, статистических и интегральных значений параметров.
Виды каналов: совмещение КС и ЛС; симплексные КС; дуплексные каналы связи (ДС) (рис. 5.28).
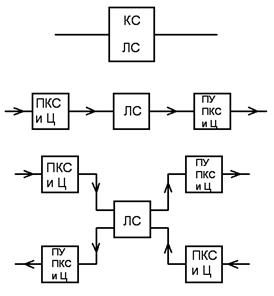
Рис. 5.28. Различные схемы связи приемного и передающего устройства
Установлены следующие классы точности устройств телеизмерений: 0,25; 0,4; 0,6; 1,0; 1,6; 2,5; 4,0.
Сравнительная оценка систем телеизмерений ведется по:
- реально достижимой минимальной погрешности;
- помехоустойчивости;
- надежности системы;
- возможности работы с различными каналами связи;
- стоимости;
- возможности унификации и массового производства унифицированных устройств.
Лучшие – кодоимпульсные системы телеизмерений.
Как указывалось выше, система телеизмерения предназначается для передачи на расстояние оперативно-технологической и производственно-статистической информации в диспетчерских системах контроля и управления и в автоматизированныхсистемах управления (АСУ) различных отраслей народного хозяйства с территориально разобщенными объектами.
Система состоит из набора типовых функциональных узлов и блоков, выполненных в основном на интегральных микросхемах и построенных на их базе комплексов телемеханических устройств. Эти комплексы выполняют функции передачи и приема информации, а также простейшей ее обработки на пункте управления (ПУ) и контролируемом пункте (КП).
На контролируемыхпунктах источниками информации является разнообразные датчики измеряемых параметров, датчики состояния объектов, машинные и магнитные носители информации (на перфоленте, перфокартах и т.п.), устройства ручного ввода информации, сама аппаратура КП и ЭВМ.
На пункте управления источниками информации может быть пульт с ключами и другими элементами управления двухпозиционными и многопозиционнымиобъектами, задатчики уставок автоматических регуляторов, машинные носители, ЭВМ и дисплеи.
Приемниками информации на ПУ являются различные приборы на щите и пульте диспетчера или оператора, ЭВМ, дисплей и машинные носители информации.
В системе приняты:
- система приоритетов для различных видов информации с соответствующим разделением во времени при ее передаче;
- система приоритетов для различных КП с соответствующим во времени их обслуживанием;
- адресно-групповой метод передачи информации, обладающий широкими возможностями выбирать и изменять различное число КП, объемы и виды прерываемое информации;
- спорадические методы передачи дискретной и непрерывной информации;
- обработка информации осуществляется как устройствами для обработки, входящими в отдельные ветви ГСП, так и ЭВМ;
- устройства построены с учетом специфических особенностей используемых каналов связи (КС).
В системе также приняты:
- унификация сопряжений;
- унификация конструктивной базы;
- агрегатирование технических средств.
Перечисленные принципы построения системы позволяют:
- сопрягать блоки и устройства системы с устройствами других ветвей ГСП;
- разрабатывать различные устройства телемеханики из ограниченного набора функциональных блоков;
- увеличить серийность производства и сократить стоимость аппаратуры путем централизованного производства функциональных блоков с типовыми конструктивами;
- сократить объем и сроки разработки, проектирования и упростить эксплуатацию устройств телемеханики.
Все функциональные блоки системы делятся на следующие группы: источники информации; приемники информации; приемники – источники; централи-блоки режима работы, выполняющие функции управления и координации, позволяющие приемникам и источникам работать асинхронно.
Функциональные блоки подразделяются также на инициативные и неинициативные. Инициативные блоки-источники формируют сигнал запроса связи и содержат узлы наличия информации. Блоки-источники могут работать в неинициативном режиме – по команде, поступающей на вход блока. К инициативным блокам относятся также блоки-приемники, формирующие сигнал запроса связи, например, при обнаружении искажений в принятой информации.
Все функциональные блоки разделяются по выполняемым функциям на следующие группы блоков, размещаемых на КП и ПУ (рис. 5.19):
- первичные преобразователи (ПП);
- преобразователи кодов и сигналов (ПКС) для передачи и приема информации;
- блоки управления передачей и приемом отдельных видовинформации (УПП);
- блоки обработки и отображения информации (ООИ);
- блоки режима работы, определяющие алгоритм устройства (Ц – централи);
- все блоки, объединенные на ПЭВМ.
К преобразователям кодов и сигналов относятся блоки модуляторы-демодуляторы для передачи и приема сигналов при работе по каналу связи, узлы тактовой синхронизации, блоки повышения достоверности, преобразователи последовательного кода в параллельный, устройства памяти.
Блоки управления передачей и приемом информации включают в себя управление информацией ТУ, ТС, ТИИ, ТИТ, ПСИ (производственно-статистическая) и КК (кодовые команды). К блокам также относятся устройства сопряжения с ЭВМ.
К блокам обработкии отображения информации относятся: преобразователи кодов, например, в двоичный и двоично-десятичный, цифро-аналоговые преобразователи,блоки масштабирования, сравнения кодов, цифровой индикации, управления цифровой регистрацией,управленияфотосчитыванием; управления перфоратором, воспроизведения сигналов состояния объектов длямимического и светового табло, ИВК и ПЭВМ.
Блок режима работы (централь, ПЭВМ) координирует работу всех блоков, объединенных в устройство, реализует выбранную систему приоритетов, устанавливает связь между блоками по заданной программе, контролирует заданную дисциплину передачи информации по каналусвязи, формирует сигналы общей неисправности устройства и тактирующие сигналы длявсех блоков.
В систему также входят ряд вспомогательных узлов, таких, как генераторы тактовых импульсов, распределители импульсов, усилители для выхода на реле и лампы накаливания и т.д. Предусмотрено и возможное расширение блоков агрегатной системы. Генераторы тактовых импульсов рассчитаны на фиксированные скорости передачи информации по каналу связи 50, 100, 200, 300, 600 и 1200 бит/с.
Как было показано выше, лучшими считаются кодо-импульсные телеизмерительные системы, поэтому ограничимся рассмотрением только этих систем.
В многоканальных кодо-импульсных устройствах многие функциональные узлы одноканальных устройств телеизмерений. В отличие от одноканальных в них добавляются синхронно и синфазно работающие коммутаторы, в передающем и приемном устройствах. В них применяется временное циклическое разделение каналов телеизмерений. Обобщенные структурные схемы передающего и приемного устройств такой многоканальной циклической системы телеизмерений с временным разделением каналов приведены соответственно на рис. 5.29 и 5.30.
В передающем устройстве (рис. 5.29) добавляется коммутатор и соответственно усложняется алгоритм управляющего узла УУ, который управляет и работой коммутатора. Последний поочередно подключает первичные преобразователи.
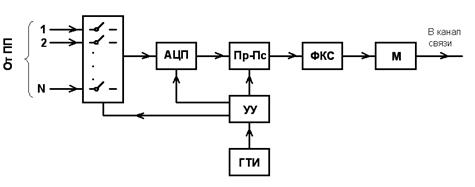
Рис. 5.29. Структурная схема передающего устройства многоканальной импульсной циклической системы
В приемном устройстве на рис. 5.30, если на выходах включены аналоговые выходные приборы ВП, функционирование узлов, в основном стандартное. Исключение составляет управляющий узел УУ, для которого усложняется алгоритм. Коммутатор Км поочередно подключает ЦАП к выходным аналоговым приборам синхронно и синфазно с работой коммутатора Км на передающей стороне с постоянной частотой циклов и тактов. Многоканальные циклические телеизмерительные системы с временным разделением каналов применялись в радиотелеметрии и промышленной телемеханике. Одинаковые с одноканальными и сравнительно сложные преобразователи в передающем и приемном устройствах здесь использовались поочередно для всех N каналов, что резко снижало стоимость аппаратуры на один канал телеизмерений.
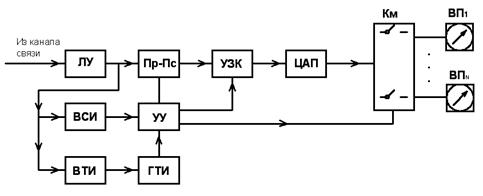
Рис. 5.30. Структурная схема приемного устройства многоканальной импульсной циклической системы
Использовались и другие структурные схемы приемного устройства с цифровым отображением информации и несколько отличным включением коммутатора. Однако все эти схемы не позволяли повысить эффективность передачи, т. е. сократить полосу частот, занимаемую в канале связи, путем уменьшения избыточности передаваемых сообщений ТИ.
Только переход на кодовое разделение каналов (адресные передачи) позволил значительно повысить эффективность передачи, т. е. резко сократить полосу частот в канале связи, которая является наиболее дефицитной и дорогостоящей. Упрощенная структурная схема передающего устройства многоканальной кодо-импульсной системы с временным кодовым разделением каналов телеизмерений приведена на рис. 5.31.
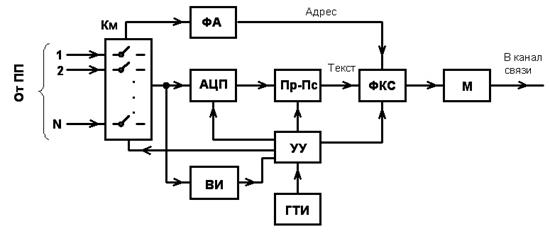
Рис. 5.31. Упрощенная структурная схема передающего устройства многоканальной кодо-импульсной системы ТИ с временным кодовым разделением каналов
В ней в отличие от схемы на рис. 5.29 применяются разностно-дискретная модуляция (РДМ) и ∆-демодуляция или первичные преобразователи имеют память и, например, не выдают сигнал на свои выходы, если измеряемая величина не изменилась больше чем на заданное значение, т.е., если нет информации (новой). В отличие от схемы на рис. 5.29 электронный коммутатор Км имеет не стабильную скорость переключения, а переменную, резко возрастающую при отсутствии передаваемой информации.
Рассмотрим работу схемы на рис. 5.31. Каналы телеизмерений опрашиваются коммутатором Км поочередно. Если при опросе i-ro канала есть сигнал с i-го первичного преобразователя, то узел формирователя адреса ФА передает кодовую комбинацию адреса i-го канала, а аналого-цифровой преобразователь выдает кодовую комбинацию значения измеряемой величины i-ro канала (текст i-го канала). Параллельно-последовательный преобразователь Пр—Пс выдает кодовую комбинацию текста в последовательном коде, а формирователь кодовых сигналов ФКС сначала передает на модулятор М кодовую комбинацию адреса, а затем – кодовую комбинацию текста (рис. 5.30) и вырабатывает дополнительные импульсы, соответствующие контрольным разрядам принятого помехоустойчивого кода. Модулятор М согласует по частоте сигнал с каналом связи. После окончания передачи текста i-го канала коммутатор Км подключает (i+1)-й канал телеизмерений и, если этот канал имеет информацию (новую), процесс формирования кодовых сигналов осуществляется аналогично, при этом передаются адрес и текст (i+ 1)-го канала. Если выходной сигнал (i+1)-го первичного преобразователя отсутствует, то узел выявления информации ВИ вырабатывает и передает на вход управляющего узла УУ сигнал о более быстром переключении электронного коммутатора Км на последующий (i+2)-й канал и т. д. Адрес и текст с новой информацией вырабатывается соответственно в кодовой форме узлами ФА и АЦП. Как следует из рис. 5.31 последовательность действий узлов, задаваемая управляющим узлом УУ, здесь усложняется по сравнению со схемой на рис.5.29. Значительно усложняется функционирование и возрастает быстродействие электронного коммутатора.

Рис. 5.32. Последовательность кодовых сигналов в канале связи
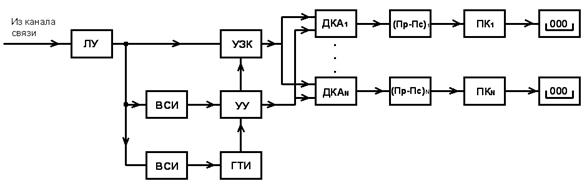
Рис. 5.33. Упрощенная структурная схема приемного устройства кодо-импульсной системы ТИ с временным кодовым разделением сигналов
ЛУ – линейный усилитель; ВТИ – выделитель тактовых импульсов; ГТИ – генератор тактовых импульсов; УУ – управляющее устройство; УЗК – узел защиты кодов; ДКА1 – ДКАN – декодирующие узлы адреса; Пс–Пр – преобразователь последовательного кода в параллельный; ПК1-ПКN – преобразователь кодов; ЦИ – цифровой индикатор
Упрощенная структурная схема приемного устройства многоканальной кодо-импульсной системы с временным кодовым разделением каналов приведена на рис.5.33 Линейный узел ЛУ демодулирует сигнал, приходящий из канала связи, и осуществляет поэлементный прием импульсов.
Узел защиты кодов УЗК пропускает на свой выход разрешенные кодовые комбинации и не пропускает запрещенные кодовые комбинации применяемого помехоустойчивого кода. Разрешенные кодовые комбинации импульсов, состоящие из адресов и текстов (рис. 5.32) в виде последовательного кода, подаются, например, одновременно на все декодирующие узлы адреса ДКА1 – ДКАN (рис. 5.33). Узлы ДКА1—ДКАN пропускают на выход текст, если кодовая комбинация передаваемого адреса соответствует комбинации, присвоенной данному узлу ДКА.
Таким образом, для кодового разделения каналов характерно применение в передающем устройстве коммутатора, частота переключения которого зависит от наличия передаваемой информации в каналах. Разделение каналов в приемном устройстве осуществляется декодирующим узлом адресов с канальными выходами, осуществляющими распределение канальных текстов с помощью логических элементов И. Переход к кодовому разделению каналов в промышленной телемеханике позволяет сократить полосу частот канала связи по меньшей мере в несколько раз.
Дата добавления: 2016-01-03; просмотров: 5825;