Шаговые двигатели с активным ротором
Шаговые двигатели по существу являются синхронными двигателями, работающими в несколько иных (необычных) режимах. Последнее накладывает отпечаток на их конструктивное исполнение. В отличие от обычных синхронных двигателей они для обеспечения нужных динамических и статических характеристик имеют минимальные диаметры ротора, выполняются без пусковой короткозамкнутой обмотки, рассчитываются на большие электромагнитные нагрузки и т. п. В настоящее время известно множество конструктивных форм шаговых двигателей.
По числу фаз (обмоток управления) шаговые двигатели можно разделить на однофазные, двухфазные и многофазные.
По типу роторов – на активные (возбужденные) и пассивные (невозбужденные). Активные шаговые двигатели можно в свою очередь разделить на двигатели с постоянными магнитами (магнитоэлектрические) и двигатели с обмотками возбуждения (электромагнитные), а пассивные – на индукторные и реактивные.
По числу пакетов стали магнитопровода двигатели делятся на однопакетные, двухпакетные и многопакетные.
По способу фиксации ротора при обесточенных обмотках управления различают двигатели с внутренней и внешней фиксацией.
Шаговые двигатели можно разделить на группы также по типу магнитной системы и другим признакам.
Описание всех конструкций шаговых двигателей, применяемых в настоящее время на практике, весьма затруднительно, поэтому далее рассматриваются лишь некоторые наиболее типичные из них.
Однопакетные шаговые двигатели с активным ротором по своей конструкции (рис. 12.3) мало отличаются от обычных синхронных двигателей. Их роторы чаще возбуждаются постоянными магнитами, реже – обмоткой возбуждения постоянного тока. Роторы имеют явно выраженные полюсы. С целью уменьшения шага их изготовляют многополюсными в виде магнитов-звездочек. Малые диаметры не позволяют значительно увеличить число полюсов, что приводит к сравнительно крупному шагу таких двигателей, который обычно находится в пределах от 15 до 90°. Уменьшение шага у этих двигателей возможно лишь за счет увеличения числа фаз статора и тактов коммутации. Стремление уменьшить шаг приводит к тому, что обмотки статора обычно выполняются с минимальным числом пазов, приходящихся на полюс и фазу q = 1.
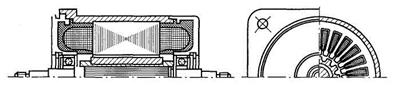
Рисунок 12.3. Шаговый двигатель ШД-2 с активным ротором
в виде магнита-звёздочки
Двигатели, от которых не требуется фиксации ротора в обесточенном состоянии, обычно изготовляются со скосом пазов статора. Последнее способствует устранению зубцовых гармоник в кривой момента М = f(θ).
При необходимости фиксации ротора в обесточенном состоянии статоры изготовляются без скоса пазов. Для увеличения фиксирующего момента пазы статора обычно имеют значительные прорези. Наличие такой внутренней фиксации ротора, не требующей конструктивных усложнений и дополнительной мощности извне, является несомненным достоинством магнитоэлектрических шаговых двигателей. Для обеспечения минимального зазора шаговые двигатели часто имеют сквозную конструкцию. Выпускается несколько серий шаговых двигателей с активным ротором – ДШ-А, ШДА, ШДА-3, ДША и др.
Кроме однопакетных шаговых двигателей с активным ротором на практике можно встретить двух-, трех- и многопакетные двигатели. У двухпакетного двигателя в одном корпусе имеется два совершенно одинаковых пакета стали ротора с одинаковыми обмотками. Пакеты стали смещены в пространстве на половину зуб-цового деления, что обеспечивает соответствующий сдвиг обмоток в пространстве и расширяет возможности двигателя – ведет к уменьшению шага без увеличения диаметра ротора и т.п. Оба ротора-звездочки располагаются на одном валу и не имеют пространственного сдвига, т. е. оси их полюсов совпадают.
Иногда для индикаторных целей (работы практически без момента сопротивления) применяются гистерезисные шаговые двигатели, у которых ротор не имеет явно выраженных полюсов и возбуждается полем статора. Шаг таких двигателей определяется числом пазов статора.
Дата добавления: 2015-10-26; просмотров: 1504;