Плоские системы координат.
Из плоских систем координат в геодезии наибольшее распространение получили система прямоугольных координат и полярная система координат. Указанные системы координат применяются при производстве съемочных работ и изображении участков земной поверхности на плоскости в виде планов и карт.
3.2.1 Плоская система прямоугольных координат. Если размеры участка земной поверхности позволяют не принимать во внимание сферичность Земли, то при производстве геодезических работ часто применяется условная система плоских прямоугольных координат, начало которой выбирается произвольно.
Элементами данной системы координат являются (рис. 3.2) ось ОХ, направление которой принимается параллельным истинному, магнитному или осевому меридиану зоны либо произвольным; ось ОY, перпендикулярная к оси ОХ; точка О – начало координат. Координаты точек равны расстояниям от начала координат до проекции этих точек на оси.
Проекции линии на оси координат называются приращениями координат и обозначаются DX и DY. Знаки приращений зависят от четверти. Если известны координаты XA и YA точки А и приращения координат DX и DY между точками А и В, то координаты точки В будут равны:
ХВ = ХА + DX
YB = YA + DY.
Данная система координат применяется при горизонтальных съемках и составлении планов местности.
3.2.2 Зональная система плоских прямоугольных координат. При топографических съемках, маркшейдерских и инженерно-геодезических работах наиболее целесообразно применять системы плоских прямоугольных координат. Поэтому для изображения на плоскости значительных территорий земной поверхности применяются картографические проекции, дающие возможность переносить точки с поверхности эллипсоида на плоскость по определенным математическим законам. В геодезии применяются такие проекции эллипсоида на плоскость, которые не искажали бы углов. Подобные проекции называются равноугольными или конформными. Возникающие при этом искажения длин и площадей должны быть незначительными и учитываться простыми формулами.
Рисунок 3.2 – Плоская условная система прямоугольных координат.
Искажения будут тем больше, чем обширнее участок поверхности эллипсоида, проектируемый на плоскость. Для того, чтобы поправки за искажение длин были сравнительно невелики, при изображение больших областей поверхности эллипсоида их делят на отдельные участки (зоны) и каждый из них изображается на плоскости в своей системе прямоугольных координат.
В общегосударственной системе плоских прямоугольных координат положение точек земной поверхности определяется координатами X и Y на плоскости, на которую они проектируются по закону равноугольной поперечно-цилиндрической проекции Гаусса-Крюгера.
Сущность проекции Гаусса-Крюгера заключается в следующем. Земной эллипсоид делится меридианами через 60 по долготе на 60 зон, простирающихся от полюса до полюса (рис. 3.3 а). Нумерация зон ведется с запада на восток от Гринвичского меридиана, который является западной границей первой зоны. Средний меридиан каждой зоны называется осевым.
Осевой меридиан зоны изображается на плоскости прямой линией и принимается за ось абсцисс (Х); осью ординат (Y) является изображение экватора. На территории Украины, полностью расположенной в северном полушарии, абсциссы всегда положительны. Ординаты же могут быть как положительными, так и отрицательными. Чтобы избежать отрицательных значений ординат, ось Х условно переносят на 500 км к западу от осевого меридиана (рис. 3.3 б). Исправленную таким образом ординату называют приведенной (Y).
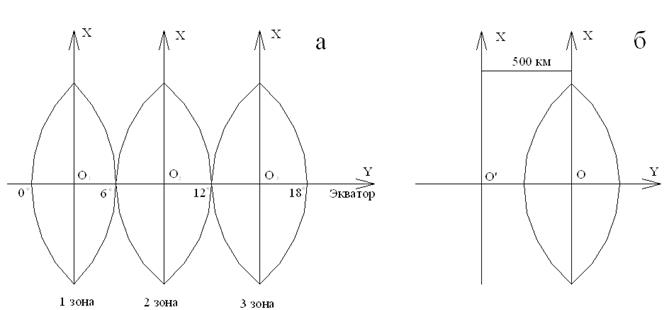
где а – схема изображения зон после развертки на плоскости;
б – схема определения приведенных координат.
Рисунок 3.3 – Зональная система прямоугольных координат.
В каждой из 60 зон численные значения координат X и Y могут повторятся. Поэтому для однозначного определения положения точки на земной поверхности перед каждой ординатой ставится номер зоны.
Зональная система плоских прямоугольных координат находит самое широкое применение при составлении планов и карт территории нашей страны.
3.2.3 Система плоских полярных координат. Элементами данной системы координат являются полярная ось ОХ (за ось ОХ может приниматься любое направление, например сторона теодолитного хода); точка О - начало координат или полюс (обычно за полюс принимается точка теодолитного хода).
Положение точек на плоскости в рассматриваемой системе координат определяется двумя координатами: горизонтальным углом b между полярной осью и направлением на определяемую точку; горизонтальным расстоянием d от полюса до определяемой точки (рис. 3.4).
Рисунок 3.4 – Плоская система полярных координат
Дата добавления: 2015-10-05; просмотров: 5492;