Многопроцессорные системы
Классификация систем параллельной обработки данных. На протяжении всей истории развития вычислительной техники делались попытки найти какую-то общую классификацию, под которую подпадали бы все возможные направления развития компьютерных архитектур. Ни одна из таких классификаций не могла охватить все разнообразие разрабатываемых архитектурных решений и не выдерживала испытания временем. Тем не менее в научный оборот попали и широко используются ряд терминов, которые полезно знать не только разработчикам, но и пользователям компьютеров.
Любая вычислительная система (будь то супер-ЭВМ или персональный компьютер) достигает своей наивысшей производительности благодаря использованию высокоскоростных элементов и параллельному выполнению большого числа операций. Именно возможность параллельной работы различных устройств системы (работы с перекрытием) является основой ускорения основных операций.
Параллельные ЭВМ часто подразделяются по классификации Флинна на машины типа SIMD (Single Instruction Multiple Data - с одним потоком команд при множественном потоке данных) и MIMD (Multiple Instruction Multiple Data - с множественным потоком команд при множественном потоке данных). Как и любая другая, приведенная выше классификация несовершенна: существуют машины прямо в нее не попадающие, имеются также важные признаки, которые в этой классификации не учтены. В частности, к машинам типа SIMD часто относят векторные процессоры, хотя их высокая производительность зависит от другой формы параллелизма - конвейерной организации машины. Многопроцессорные векторные системы, типа Cray Y-MP, состоят из нескольких векторных процессоров и поэтому могут быть названы MSIMD (Multiple SIMD).
Классификация Флинна не делает различия по другим важным для вычислительных моделей характеристикам, например, по уровню "зернистости" параллельных вычислений и методам синхронизации.
Можно выделить четыре основных типа архитектуры систем параллельной обработки:
1) Конвейерная и векторная обработка.
Основу конвейерной обработки составляет раздельное выполнение некоторой операции в несколько этапов (за несколько ступеней) с передачей данных одного этапа следующему. Производительность при этом возрастает благодаря тому, что одновременно на различных ступенях конвейера выполняются несколько операций. Конвейеризация эффективна только тогда, когда загрузка конвейера близка к полной, а скорость подачи новых операндов соответствует максимальной производительности конвейера. Если происходит задержка, то параллельно будет выполняться меньше операций и суммарная производительность снизится. Векторные операции обеспечивают идеальную возможность полной загрузки вычислительного конвейера.
При выполнении векторной команды одна и та же операция применяется ко всем элементам вектора (или чаще всего к соответствующим элементам пары векторов). Для настройки конвейера на выполнение конкретной операции может потребоваться некоторое установочное время, однако затем операнды могут поступать в конвейер с максимальной скоростью, допускаемой возможностями памяти. При этом не возникает пауз ни в связи с выборкой новой команды, ни в связи с определением ветви вычислений при условном переходе. Таким образом, главный принцип вычислений на векторной машине состоит в выполнении некоторой элементарной операции или комбинации из нескольких элементарных операций, которые должны повторно применяться к некоторому блоку данных. Таким операциям в исходной программе соответствуют небольшие компактные циклы.
2) Машины типа SIMD. Машины типа SIMD состоят из большого числа идентичных процессорных элементов, имеющих собственную память. Все процессорные элементы в такой машине выполняют одну и ту же программу. Очевидно, что такая машина, составленная из большого числа процессоров, может обеспечить очень высокую производительность только на тех задачах, при решении которых все процессоры могут делать одну и ту же работу. Модель вычислений для машины SIMD очень похожа на модель вычислений для векторного процессора: одиночная операция выполняется над большим блоком данных.
В отличие от ограниченного конвейерного функционирования векторного процессора, матричный процессор (синоним для большинства SIMD-машин) может быть значительно более гибким. Обрабатывающие элементы таких процессоров - это универсальные программируемые ЭВМ, так что задача, решаемая параллельно, может быть достаточно сложной и содержать ветвления. Обычное проявление этой вычислительной модели в исходной программе примерно такое же, как и в случае векторных операций: циклы на элементах массива, в которых значения, вырабатываемые на одной итерации цикла, не используются на другой итерации цикла.
Модели вычислений на векторных и матричных ЭВМ настолько схожи, что эти ЭВМ часто обсуждаются как эквивалентные.
3) Машины типа MIMD. Термин "мультипроцессор" покрывает большинство машин типа MIMD и (подобно тому, как термин "матричный процессор" применяется к машинам типа SIMD) часто используется в качестве синонима для машин типа MIMD. В мультипроцессорной системе каждый процессорный элемент (ПЭ) выполняет свою программу достаточно независимо от других процессорных элементов. Процессорные элементы, конечно, должны как-то связываться друг с другом, что делает необходимым более подробную классификацию машин типа MIMD. В мультипроцессорах с общей памятью (сильносвязанных мультипроцессорах) имеется память данных и команд, доступная всем ПЭ. С общей памятью ПЭ связываются с помощью общей шины или сети обмена. В противоположность этому варианту в слабосвязанных многопроцессорных системах (машинах с локальной памятью) вся память делится между процессорными элементами и каждый блок памяти доступен только связанному с ним процессору. Сеть обмена связывает процессорные элементы друг с другом.
Базовой моделью вычислений на MIMD-мультипроцессоре является совокупность независимых процессов, эпизодически обращающихся к разделяемым данным. Существует большое количество вариантов этой модели. На одном конце спектра - модель распределенных вычислений, в которой программа делится на довольно большое число параллельных задач, состоящих из множества подпрограмм. На другом конце спектра - модель потоковых вычислений, в которых каждая операция в программе может рассматриваться как отдельный процесс. Такая операция ждет своих входных данных (операндов), которые должны быть переданы ей другими процессами. По их получении операция выполняется, и полученное значение передается тем процессам, которые в нем нуждаются. В потоковых моделях вычислений с большим и средним уровнем гранулярности, процессы содержат большое число операций и выполняются в потоковой манере.
4) Многопроцессорные машины с SIMD-процессорами.
Многие современные супер-ЭВМ представляют собой многопроцессорные системы, в которых в качестве процессоров используются векторные процессоры или процессоры типа SIMD. Такие машины относятся к машинам класса MSIMD.
Языки программирования и соответствующие компиляторы для машин типа MSIMD обычно обеспечивают языковые конструкции, которые позволяют программисту описывать "крупнозернистый" параллелизм. В пределах каждой задачи компилятор автоматически векторизует подходящие циклы. Машины типа MSIMD, как можно себе представить, дают возможность использовать лучший из этих двух принципов декомпозиции: векторные операции ("мелкозернистый" параллелизм) для тех частей программы, которые подходят для этого, и гибкие возможности MIMD-архитектуры для других частей программы.
Многопроцессорные системы за годы развития вычислительной техники претерпели ряд этапов своего развития. Исторически первой стала осваиваться технология SIMD. Однако в настоящее время наметился устойчивый интерес к архитектурам MIMD. Этот интерес главным образом определяется двумя факторами:
1. Архитектура MIMD дает большую гибкость: при наличии адекватной поддержки со стороны аппаратных средств и программного обеспечения MIMD может работать как однопользовательская система, обеспечивая высокопроизводительную обработку данных для одной прикладной задачи, как многопрограммная машина, выполняющая множество задач параллельно, и как некоторая комбинация этих возможностей.
2. Архитектура MIMD может использовать все преимущества современной микропроцессорной технологии на основе строгого учета соотношения стоимость/производительность. В действительности практически все современные многопроцессорные системы строятся на тех же микропроцессорах, которые можно найти в персональных компьютерах, рабочих станциях и небольших однопроцессорных серверах.
Одной из отличительных особенностей многопроцессорной вычислительной системы является сеть обмена, с помощью которой процессоры соединяются друг с другом или с памятью. Модель обмена настолько важна для многопроцессорной системы, что многие характеристики производительности и другие оценки выражаются отношением времени обработки к времени обмена, соответствующим решаемым задачам. Существуют две основные модели межпроцессорного обмена: одна основана на передаче сообщений, другая - на использовании общей памяти. В многопроцессорной системе с общей памятью один процессор осуществляет запись в конкретную ячейку, а другой процессор производит считывание из этой ячейки памяти. Чтобы обеспечить согласованность данных и синхронизацию процессов, обмен часто реализуется по принципу взаимно исключающего доступа к общей памяти методом "почтового ящика".
В архитектурах с локальной памятью непосредственное разделение памяти невозможно. Вместо этого процессоры получают доступ к совместно используемым данным посредством передачи сообщений по сети обмена. Эффективность схемы коммуникаций зависит от протоколов обмена, основных сетей обмена и пропускной способности памяти и каналов обмена.
Часто, в машинах с общей памятью и векторных машинах затраты на обмен не учитываются, так как проблемы обмена в значительной степени скрыты от программиста. Однако накладные расходы на обмен в этих машинах имеются и определяются конфликтами шин, памяти и процессоров. Чем больше процессоров добавляется в систему, тем больше процессов соперничают при использовании одних и тех же данных и шины, что приводит к состоянию насыщения. Модель системы с общей памятью очень удобна для программирования и иногда рассматривается как высокоуровневое средство оценки влияния обмена на работу системы, даже если основная система в действительности реализована с применением локальной памяти и принципа передачи сообщений.
В сетях с коммутацией каналов и в сетях с коммутацией пакетов по мере возрастания требований к обмену следует учитывать возможность перегрузки сети. Здесь межпроцессорный обмен связывает сетевые ресурсы: каналы, процессоры, буферы сообщений. Объем передаваемой информации может быть сокращен за счет тщательной функциональной декомпозиции задачи и тщательного диспетчирования выполняемых функций.
Таким образом, существующие MIMD-машины распадаются на два основных класса в зависимости от количества объединяемых процессоров, которое определяет и способ организации памяти и методику их межсоединений.
К первой группе относятся машины с общей (разделяемой) основной памятью, объединяющие до нескольких десятков (обычно менее 32) процессоров. Сравнительно небольшое количество процессоров в таких машинах позволяет иметь одну централизованную общую память и объединить процессоры и память с помощью одной шины. При наличии у процессоров кэш-памяти достаточного объема высокопроизводительная шина и общая память могут удовлетворить обращения к памяти, поступающие от нескольких процессоров. Поскольку имеется единственная память с одним и тем же временем доступа, эти машины иногда называются UMA (Uniform Memory Access). Такой способ организации со сравнительно небольшой разделяемой памятью в настоящее время является наиболее популярным. Структура подобной системы представлена на рис. 2.6.

Рис. 2.6. Типовая архитектура мультипроцессорной системы с общей памятью.
Вторую группу машин составляют крупномасштабные системы с распределенной памятью. Для того чтобы поддерживать большое количество процессоров приходится распределять основную память между ними, в противном случае полосы пропускания памяти просто может не хватить для удовлетворения запросов, поступающих от очень большого числа процессоров. Естественно при таком подходе также требуется реализовать связь процессоров между собой. На рис. 2.7 показана структура такой системы.
С ростом числа процессоров просто невозможно обойти необходимость реализации модели распределенной памяти с высокоскоростной сетью для связи процессоров. С быстрым ростом производительности процессоров и связанным с этим ужесточением требования увеличения полосы пропускания памяти, масштаб систем (т.е. число процессоров в системе), для которых требуется организация распределенной памяти, уменьшается, также как и уменьшается число процессоров, которые удается поддерживать на одной разделяемой шине и общей памяти.
Распределение памяти между отдельными узлами системы имеет два главных преимущества. Во-первых, это эффективный с точки зрения стоимости способ увеличения полосы пропускания памяти, поскольку большинство обращений могут выполняться параллельно к локальной памяти в каждом узле. Во-вторых, это уменьшает задержку обращения (время доступа) к локальной памяти. Эти два преимущества еще больше сокращают количество процессоров, для которых архитектура с распределенной памятью имеет смысл.
Обычно устройства ввода/вывода, также как и память, распределяются по узлам и в действительности узлы могут состоять из небольшого числа (2-8) процессоров, соединенных между собой другим способом. Хотя такая кластеризация нескольких процессоров с памятью и сетевой интерфейс могут быть достаточно полезными с точки зрения эффективности в стоимостном выражении, это не очень существенно для понимания того, как такая машина работает, поэтому мы пока остановимся на системах с одним процессором на узел. Основная разница в архитектуре, которую следует выделить в машинах с распределенной памятью заключается в том, как осуществляется связь и какова логическая модель памяти.
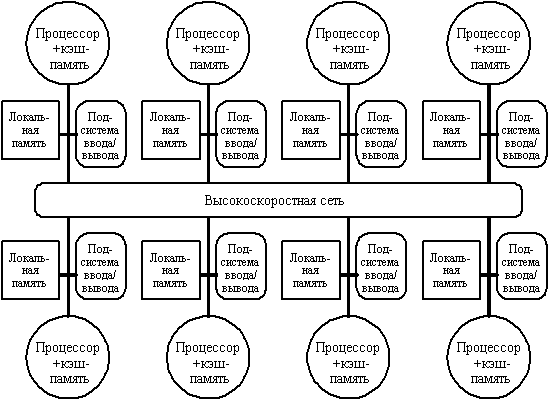
Рис. 2.7. Типовая архитектура машины с распределенной памятью.
Модели связи и архитектуры памяти. Как уже было отмечено, любая крупномасштабная многопроцессорная система должна использовать множество устройств памяти, которые физически распределяются вместе с процессорами. Имеется две альтернативных организации адресации этих устройств памяти и связанных с этим два альтернативных метода для передачи данных между процессорами. Физически отдельные устройства памяти могут адресоваться как логически единое адресное пространство, что означает, что любой процессор может выполнять обращения к любым ячейкам памяти, предполагая, что он имеет соответствующие права доступа. Такие машины называются машинами с распределенной разделяемой (общей) памятью (DSM - distributed shared memory), масштабируемые архитектуры с разделяемой памятью, а иногда NUMA's - Non-Uniform Memory Access, поскольку время доступа зависит от расположения ячейки в памяти.
В альтернативном случае, адресное пространство состоит из отдельных адресных пространств, которые логически не связаны и доступ к которым не может быть осуществлен аппаратно другим процессором. В таком примере каждый модуль процессор-память представляет собой отдельный компьютер, поэтому такие системы называются многомашинными (multicomputers).
С каждой из этих организаций адресного пространства связан свой механизм обмена. Для машины с единым адресным пространством это адресное пространство может быть использовано для обмена данными посредством операций загрузки и записи. Поэтому эти машины и получили название машин с разделяемой (общей) памятью. Для машин с множеством адресных пространств обмен данными должен использовать другой механизм: передачу сообщений между процессорами; поэтому эти машины часто называют машинами с передачей сообщений.
Каждый из этих механизмов обмена имеет свои преимущества. Для обмена в общей памяти это включает:
Совместимость с хорошо понятными используемыми как в однопроцессорных, так и маломасштабных многопроцессорных системах, механизмами, которые используют для обмена общую память.
Простота программирования, когда модели обмена между процессорами сложные или динамически меняются во время выполнения. Подобные преимущества упрощают конструирование компилятора.
Более низкая задержка обмена и лучшее использование полосы пропускания при обмене малыми порциями данных.
Возможность использования аппаратно управляемого кэширования для снижения частоты удаленного обмена, допускающая кэширование всех данных как разделяемых, так и неразделяемых.
Основные преимущества обмена с помощью передачи сообщений являются:
Аппаратура может быть более простой, особенно по сравнению с моделью разделяемой памяти, которая поддерживает масштабируемую когерентность кэш-памяти.
Модели обмена понятны, принуждают программистов (или компиляторы) уделять внимание обмену, который обычно имеет высокую, связанную с ним стоимость.
Конечно, требуемая модель обмена может быть надстроена над аппаратной моделью, которая использует любой из этих механизмов. Поддержка передачи сообщений над разделяемой памятью, естественно, намного проще, если предположить, что машины имеют адекватные полосы пропускания. Основные трудности возникают при работе с сообщениями, которые могут быть неправильно выровнены и сообщениями произвольной длины в системе памяти, которая обычно ориентирована на передачу выровненных блоков данных, организованных как блоки кэш-памяти. Эти трудности можно преодолеть либо с небольшими потерями производительности программным способом, либо существенно без потерь при использовании небольшой аппаратной поддержки.
Построение механизмов реализации разделяемой памяти над механизмом передачи сообщений намного сложнее. Без предполагаемой поддержки со стороны аппаратуры все обращения к разделяемой памяти потребуют привлечения операционной системы как для обеспечения преобразования адресов и защиты памяти, так и для преобразования обращений к памяти в посылку и прием сообщений. Поскольку операции загрузки и записи обычно работают с небольшим объемом данных, то большие накладные расходы по поддержанию такого обмена делают невозможной чисто программную реализацию.
При оценке любого механизма обмена критичными являются три характеристики производительности:
Полоса пропускания: в идеале полоса пропускания механизма обмена будет ограничена полосами пропускания процессора, памяти и системы межсоединений, а не какими-либо аспектами механизма обмена. Связанные с механизмом обмена накладные расходы (например, длина межпроцессорной связи) прямо воздействуют на полосу пропускания.
Задержка: в идеале задержка должна быть настолько мала, насколько это возможно. Для ее определения критичны накладные расходы аппаратуры и программного обеспечения, связанные с инициированием и завершением обмена.
Упрятывание задержки: насколько хорошо механизм скрывает задержку путем перекрытия обмена с вычислениями или с другими обменами.
Каждый из этих параметров производительности воздействует на характеристики обмена. В частности, задержка и полоса пропускания могут меняться в зависимости от размера элемента данных. В общем случае, механизм, который одинаково хорошо работает как с небольшими, так и с большими объемами данных будет более гибким и эффективным.
Таким образом, отличия разных машин с распределенной памятью определяются моделью памяти и механизмом обмена. Исторически машины с распределенной памятью первоначально были построены с использованием механизма передачи сообщений, поскольку это было очевидно проще и многие разработчики и исследователи не верили, что единое адресное пространство можно построить и в машинах с распределенной памятью. С недавнего времени модели обмена с общей памятью действительно начали поддерживаться практически в каждой разработанной машине (характерным примером могут служить системы с симметричной мультипроцессорной обработкой). Хотя машины с централизованной общей памятью, построенные на базе общей шины все еще доминируют в терминах размера компьютерного рынка, долговременные технические тенденции направлены на использование преимуществ распределенной памяти даже в машинах умеренного размера. Как мы увидим, возможно наиболее важным вопросом, который встает при создании машин с распределенной памятью, является вопрос о кэшировании и когерентности кэш-памяти.
Многопроцессорные системы с общей памятью. Требования, предъявляемые современными процессорами к полосе пропускания памяти можно существенно сократить путем применения больших многоуровневых кэшей. Тогда, если эти требования снижаются, то несколько процессоров смогут разделять доступ к одной и той же памяти. Начиная с 1980 года эта идея, подкрепленная широким распространением микропроцессоров, стимулировала многих разработчиков на создание небольших мультипроцессоров, в которых несколько процессоров разделяют одну физическую память, соединенную с ними с помощью разделяемой шины. Из-за малого размера процессоров и заметного сокращения требуемой полосы пропускания шины, достигнутого за счет возможности реализации достаточно большой кэш-памяти, такие машины стали исключительно эффективными по стоимости. В первых разработках подобного рода машин удавалось разместить весь процессор и кэш на одной плате, которая затем вставлялась в заднюю панель, с помощью которой реализовывалась шинная архитектура. Современные конструкции позволяют разместить до четырех процессоров на одной плате. На рис. 10.1 показана схема именно такой машины.
В такой машине кэши могут содержать как разделяемые, так и частные данные. Частные данные - это данные, которые используются одним процессором, в то время как разделяемые данные используются многими процессорами, по существу обеспечивая обмен между ними. Когда кэшируется элемент частных данных, их значение переносится в кэш для сокращения среднего времени доступа, а также требуемой полосы пропускания. Поскольку никакой другой процессор не использует эти данные, этот процесс идентичен процессу для однопроцессорной машины с кэш-памятью. Если кэшируются разделяемые данные, то разделяемое значение реплицируется и может содержаться в нескольких кэшах. Кроме сокращения задержки доступа и требуемой полосы пропускания такая репликация данных способствует также общему сокращению количества обменов. Однако кэширование разделяемых данных вызывает новую проблему: когерентность кэш-памяти.
Мультипроцессорная когерентность кэш-памяти. Проблема, о которой идет речь, возникает из-за того, что значение элемента данных в памяти, хранящееся в двух разных процессорах, доступно этим процессорам только через их индивидуальные кэши. На рис. 10.3 показан простой пример, иллюстрирующий эту проблему.
Проблема когерентности памяти для мультипроцессоров и устройств ввода/вывода имеет много аспектов. Обычно в малых мультипроцессорах используется аппаратный механизм, называемый протоколом, позволяющий решить эту проблему. Такие протоколы называются протоколами когерентности кэш-памяти. Существуют два класса таких протоколов:
Протоколы на основе справочника (directory based). Информация о состоянии блока физической памяти содержится только в одном месте, называемом справочником (физически справочник может быть распределен по узлам системы). Этот подход будет рассмотрен в разд. 2.8.
Протоколы наблюдения (snooping). Каждый кэш, который содержит копию данных некоторого блока физической памяти, имеет также соответствующую копию служебной информации о его состоянии. Централизованная система записей отсутствует. Обычно кэши расположены на общей (разделяемой) шине и контроллеры всех кэшей наблюдают за шиной (просматривают ее) для определения того, не содержат ли они копию соответствующего блока.
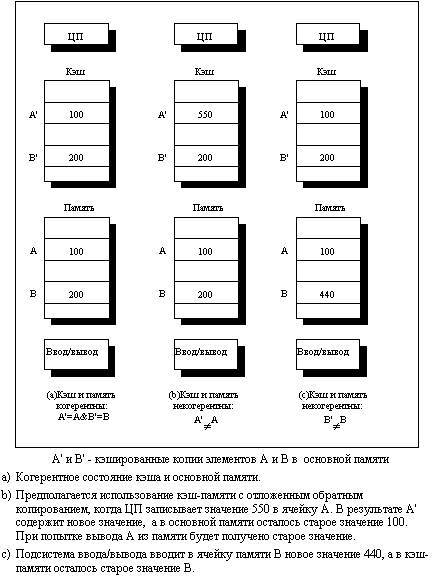
Рис.2.8. Иллюстрация проблемы когерентности кэш-памяти.
В мультипроцессорных системах, использующих микропроцессоры с кэш-памятью, подсоединенные к централизованной общей памяти, протоколы наблюдения приобрели популярность, поскольку для опроса состояния кэшей они могут использовать заранее существующее физическое соединение - шину памяти.
Неформально, проблема когерентности памяти состоит в необходимости гарантировать, что любое считывание элемента данных возвращает последнее по времени записанное в него значение. Это определение не совсем корректно, поскольку невозможно требовать, чтобы операция считывания мгновенно видела значение, записанное в этот элемент данных некоторым другим процессором. Если, например, операция записи на одном процессоре предшествует операции чтения той же ячейки на другом процессоре в пределах очень короткого интервала времени, то невозможно гарантировать, что чтение вернет записанное значение данных, поскольку в этот момент времени записываемые данные могут даже не покинуть процессор. Вопрос о том, когда точно записываемое значение должно быть доступно процессору, выполняющему чтение, определяется выбранной моделью согласованного (непротиворечивого) состояния памяти и связан с реализацией синхронизации параллельных вычислений. Поэтому с целью упрощения предположим, что мы требуем только, чтобы записанное операцией записи значение было доступно операции чтения, возникшей немного позже записи и что операции записи данного процессора всегда видны в порядке их выполнения.
С этим простым определением согласованного состояния памяти мы можем гарантировать когерентность путем обеспечения двух свойств:
Операция чтения ячейки памяти одним процессором, которая следует за операцией записи в ту же ячейку памяти другим процессором получит записанное значение, если операции чтения и записи достаточно отделены друг от друга по времени.
Операции записи в одну и ту же ячейку памяти выполняются строго последовательно (иногда говорят, что они сериализованы): это означает, что две подряд идущие операции записи в одну и ту же ячейку памяти будут наблюдаться другими процессорами именно в том порядке, в котором они появляются в программе процессора, выполняющего эти операции записи.
Первое свойство очевидно связано с определением когерентного (согласованного) состояния памяти: если бы процессор всегда бы считывал только старое значение данных, мы сказали бы, что память некогерентна.
Необходимость строго последовательного выполнения операций записи является более тонким, но также очень важным свойством. Представим себе, что строго последовательное выполнение операций записи не соблюдается. Тогда процессор P1 может записать данные в ячейку, а затем в эту ячейку выполнит запись процессор P2. Строго последовательное выполнение операций записи гарантирует два важных следствия для этой последовательности операций записи. Во-первых, оно гарантирует, что каждый процессор в машине в некоторый момент времени будет наблюдать запись, выполняемую процессором P2. Если последовательность операций записи не соблюдается, то может возникнуть ситуация, когда какой-нибудь процессор будет наблюдать сначала операцию записи процессора P2, а затем операцию записи процессора P1, и будет хранить это записанное P1 значение неограниченно долго. Более тонкая проблема возникает с поддержанием разумной модели порядка выполнения программ и когерентности памяти для пользователя: представьте, что третий процессор постоянно читает ту же самую ячейку памяти, в которую записывают процессоры P1 и P2; он должен наблюдать сначала значение, записанное P1, а затем значение, записанное P2. Возможно он никогда не сможет увидеть значения, записанного P1, поскольку запись от P2 возникла раньше чтения. Если он даже видит значение, записанное P1, он должен видеть значение, записанное P2, при последующем чтении. Подобным образом любой другой процессор, который может наблюдать за значениями, записываемыми как P1, так и P2, должен наблюдать идентичное поведение. Простейший способ добиться таких свойств заключается в строгом соблюдении порядка операций записи, чтобы все записи в одну и ту же ячейку могли наблюдаться в том же самом порядке. Это свойство называется последовательным выполнением (сериализацией) операций записи (write serialization). Вопрос о том, когда процессор должен увидеть значение, записанное другим процессором достаточно сложен и имеет заметное воздействие на производительность, особенно в больших машинах.
Альтернативные протоколы. Имеются две методики поддержания описанной выше когерентности. Один из методов заключается в том, чтобы гарантировать, что процессор должен получить исключительные права доступа к элементу данных перед выполнением записи в этот элемент данных. Этот тип протоколов называется протоколом записи с аннулированием (write ivalidate protocol), поскольку при выполнении записи он аннулирует другие копии. Это наиболее часто используемый протокол как в схемах на основе справочников, так и в схемах наблюдения. Исключительное право доступа гарантирует, что во время выполнения записи не существует никаких других копий элемента данных, в которые можно писать или из которых можно читать: все другие кэшированные копии элемента данных аннулированы. Чтобы увидеть, как такой протокол обеспечивает когерентность, рассмотрим операцию записи, вслед за которой следует операция чтения другим процессором. Поскольку запись требует исключительного права доступа, любая копия, поддерживаемая читающим процессором должна быть аннулирована (в соответствии с названием протокола). Таким образом, когда возникает операция чтения, произойдет промах кэш-памяти, который вынуждает выполнить выборку новой копии данных. Для выполнения операции записи мы можем потребовать, чтобы процессор имел достоверную (valid) копию данных в своей кэш-памяти прежде, чем выполнять в нее запись. Таким образом, если оба процессора попытаются записать в один и тот же элемент данных одновременно, один из них выиграет состязание у второго (мы вскоре увидим, как принять решение, кто из них выиграет) и вызывает аннулирование его копии. Другой процессор для завершения своей операции записи должен сначала получить новую копию данных, которая теперь уже должна содержать обновленное значение.
Альтернативой протоколу записи с аннулированием является обновление всех копий элемента данных в случае записи в этот элемент данных. Этот тип протокола называется протоколом записи с обновлением (write update protocol) или протоколом записи с трансляцией (write broadcast protocol). Обычно в этом протоколе для снижения требований к полосе пропускания полезно отслеживать, является ли слово в кэш-памяти разделяемым объектом, или нет, а именно, содержится ли оно в других кэшах. Если нет, то нет никакой необходимости обновлять другой кэш или транслировать в него обновленные данные.
Разница в производительности между протоколами записи с обновлением и с аннулированием определяется тремя характеристиками:
Несколько последовательных операций записи в одно и то же слово, не перемежающихся операциями чтения, требуют нескольких операций трансляции при использовании протокола записи с обновлением, но только одной начальной операции аннулирования при использовании протокола записи с аннулированием.
При наличии многословных блоков в кэш-памяти каждое слово, записываемое в блок кэша, требует трансляции при использовании протокола записи с обновлением, в то время как только первая запись в любое слово блока нуждается в генерации операции аннулирования при использовании протокола записи с аннулированием. Протокол записи с аннулированием работает на уровне блоков кэш-памяти, в то время как протокол записи с обновлением должен работать на уровне отдельных слов (или байтов, если выполняется запись байта).
Задержка между записью слова в одном процессоре и чтением записанного значения другим процессором обычно меньше при использовании схемы записи с обновлением, поскольку записанные данные немедленно транслируются в процессор, выполняющий чтение (предполагается, что этот процессор имеет копию данных). Для сравнения, при использовании протокола записи с аннулированием в процессоре, выполняющим чтение, сначала произойдет аннулирование его копии, затем будет производиться чтение данных и его приостановка до тех пор, пока обновленная копия блока не станет доступной и не вернется в процессор.
Эти две схемы во многом похожи на схемы работы кэш-памяти со сквозной записью и с записью с обратным копированием. Также как и схема задержанной записи с обратным копированием требует меньшей полосы пропускания памяти, так как она использует преимущества операций над целым блоком, протокол записи с аннулированием обычно требует менее тяжелого трафика, чем протокол записи с обновлением, поскольку несколько записей в один и тот же блок кэш-памяти не требуют трансляции каждой записи. При сквозной записи память обновляется почти мгновенно после записи (возможно с некоторой задержкой в буфере записи). Подобным образом при использовании протокола записи с обновлением другие копии обновляются так быстро, насколько это возможно. Наиболее важное отличие в производительности протоколов записи с аннулированием и с обновлением связано с характеристиками прикладных программ и с выбором размера блока.
Основы реализации. Ключевым моментом реализации в многопроцессорных системах с небольшим числом процессоров как схемы записи с аннулированием, так и схемы записи с обновлением данных, является использование для выполнения этих операций механизма шины. Для выполнения операции обновления или аннулирования процессор просто захватывает шину и транслирует по ней адрес, по которому должно производиться обновление или аннулирование данных. Все процессоры непрерывно наблюдают за шиной, контролируя появляющиеся на ней адреса. Процессоры проверяют не находится ли в их кэш-памяти адрес, появившийся на шине. Если это так, то соответствующие данные в кэше либо аннулируются, либо обновляются в зависимости от используемого протокола. Последовательный порядок обращений, присущий шине, обеспечивает также строго последовательное выполнение операций записи, поскольку когда два процессора конкурируют за выполнение записи в одну и ту же ячейку, один из них должен получить доступ к шине раньше другого. Один процессор, получив доступ к шине, вызовет необходимость обновления или аннулирования копий в других процессорах. В любом случае, все записи будут выполняться строго последовательно. Один из выводов, который следует сделать из анализа этой схемы заключается в том, что запись в разделяемый элемент данных не может закончиться до тех пор, пока она не захватит доступ к шине.
В дополнение к аннулированию или обновлению соответствующих копий блока кэш-памяти, в который производилась запись, мы должны также разместить элемент данных, если при записи происходит промах кэш-памяти. В кэш-памяти со сквозной записью последнее значение элемента данных найти легко, поскольку все записываемые данные всегда посылаются также и в память, из которой последнее записанное значение элемента данных может быть выбрано (наличие буферов записи может привести к некоторому усложнению).
Однако для кэш-памяти с обратным копированием задача нахождения последнего значения элемента данных сложнее, поскольку это значение скорее всего находится в кэше, а не в памяти. В этом случае используется та же самая схема наблюдения, что и при записи: каждый процессор наблюдает и контролирует адреса, помещаемые на шину. Если процессор обнаруживает, что он имеет модифицированную ("грязную") копию блока кэш-памяти, то именно он должен обеспечить пересылку этого блока в ответ на запрос чтения и вызвать отмену обращения к основной памяти. Поскольку кэши с обратным копированием предъявляют меньшие требования к полосе пропускания памяти, они намного предпочтительнее в мультипроцессорах, несмотря на некоторое увеличение сложности. Поэтому далее мы рассмотрим вопросы реализации кэш-памяти с обратным копированием.
Для реализации процесса наблюдения могут быть использованы обычные теги кэша. Более того, упоминавшийся ранее бит достоверности (valid bit), позволяет легко реализовать аннулирование. Промахи операций чтения, вызванные либо аннулированием, либо каким-нибудь другим событием, также не сложны для понимания, поскольку они просто основаны на возможности наблюдения. Для операций записи мы хотели бы также знать, имеются ли другие кэшированные копии блока, поскольку в случае отсутствия таких копий, запись можно не посылать на шину, что сокращает время на выполнение записи, а также требуемую полосу пропускания.
Чтобы отследить, является ли блок разделяемым, мы можем ввести дополнительный бит состояния (shared), связанный с каждым блоком, точно также как это делалось для битов достоверности (valid) и модификации (modified или dirty) блока. Добавив бит состояния, определяющий является ли блок разделяемым, мы можем решить вопрос о том, должна ли запись генерировать операцию аннулирования в протоколе с аннулированием, или операцию трансляции при использовании протокола с обновлением. Если происходит запись в блок, находящийся в состоянии "разделяемый" при использовании протокола записи с аннулированием, кэш формирует на шине операцию аннулирования и помечает блок как частный (private). Никаких последующих операций аннулирования этого блока данный процессор посылать больше не будет. Процессор с исключительной (exclusive) копией блока кэш-памяти обычно называется "владельцем" (owner) блока кэш-памяти.
При использовании протокола записи с обновлением, если блок находится в состоянии "разделяемый", то каждая запись в этот блок должна транслироваться. В случае протокола с аннулированием, когда посылается операция аннулирования, состояние блока меняется с "разделяемый" на "неразделяемый" (или "частный"). Позже, если другой процессор запросит этот блок, состояние снова должно измениться на "разделяемый". Поскольку наш наблюдающий кэш видит также все промахи, он знает, когда этот блок кэша запрашивается другим процессором, и его состояние должно стать "разделяемый".
Поскольку любая транзакция на шине контролирует адресные теги кэша, потенциально это может приводить к конфликтам с обращениями к кэшу со стороны процессора. Число таких потенциальных конфликтов можно снизить применением одного из двух методов: дублированием тегов, или использованием многоуровневых кэшей с "охватом" (inclusion), в которых уровни, находящиеся ближе к процессору являются поднабором уровней, находящихся дальше от него. Если теги дублируются, то обращения процессора и наблюдение за шиной могут выполняться параллельно. Конечно, если при обращении процессора происходит промах, он должен будет выполнять арбитраж с механизмом наблюдения для обновления обоих наборов тегов. Точно также, если механизм наблюдения за шиной находит совпадающий тег, ему будет нужно проводить арбитраж и обращаться к обоим наборам тегов кэша (для выполнения аннулирования или обновления бита "разделяемый"), возможно также и к массиву данных в кэше, для нахождения копии блока. Таким образом, при использовании схемы дублирования тегов процессор должен приостановиться только в том случае, если он выполняет обращение к кэшу в тот же самый момент времени, когда механизм наблюдения обнаружил копию в кэше. Более того, активность механизма наблюдения задерживается только когда кэш имеет дело с промахом.
| Наимено-вание | Тип протокола | Стратегия записи в память | Уникальные свойстваПрименение |
| Одиночная запись | Запись с аннулированием | Обратное копирование при первой записи | Первый описанный в литературе протокол наблюдения- |
| Synapse N+1 | Запись с аннулированием | Обратное копирование | Точное состояние, где "владельцем является память"Машины Synapse Первые машины с когерентной кэш-памятью |
| Berkely | Запись с аннулированием | Обратное копирование | Состояние "разделяемый"Машина SPUR университета Berkely |
| Illinois | Запись с аннулированием | Обратное копирование | Состояние "приватный"; может передавать данные из любого кэшаСерии Power и Challenge компании Silicon Graphics |
| "Firefly" | Запись с транс-ляцией | Обратное копирование для "приватных" блоков и сквозная запись для "разделяемых" | Обновление памяти во время трансляцииSPARCcenter 2000 |
Рис.2.9. Примеры протоколов наблюдения
Если процессор использует многоуровневый кэш со свойствами охвата, тогда каждая строка в основном кэше имеется и во вторичном кэше. Таким образом, активность по наблюдению может быть связана с кэшем второго уровня, в то время как большинство активностей процессора могут быть связаны с первичным кэшем. Если механизм наблюдения получает попадание во вторичный кэш, тогда он должен выполнять арбитраж за первичный кэш, чтобы обновить состояние и возможно найти данные, что обычно будет приводить к приостановке процессора. Такое решение было принято во многих современных системах, поскольку многоуровневый кэш позволяет существенно снизить требований к полосе пропускания. Иногда может быть даже полезно дублировать теги во вторичном кэше, чтобы еще больше сократить количество конфликтов между активностями процессора и механизма наблюдения.
В реальных системах существует много вариаций схем когерентности кэша, в зависимости от того используется ли схема на основе аннулирования или обновления, построена ли кэш-память на принципах сквозной или обратной записи, когда происходит обновление, а также имеет ли место состояние "владения" и как оно реализуется. На рис.2.9 представлены несколько протоколов с наблюдением и некоторые машины, которые используют эти протоколы.
Многопроцессорные системы с локальной памятью и многомашинные системы. Существуют два различных способа построения крупномасштабных систем с распределенной памятью. Простейший способ заключается в том, чтобы исключить аппаратные механизмы, обеспечивающие когерентность кэш-памяти, и сосредоточить внимание на создании масштабируемой системы памяти. Несколько компаний разработали такого типа машины. Наиболее известным примером такой системы является компьютер T3D компании Cray Research. В этих машинах память распределяется между узлами (процессорными элементами) и все узлы соединяются между собой посредством того или иного типа сети. Доступ к памяти может быть локальным или удаленным. Специальные контроллеры, размещаемые в узлах сети, могут на основе анализа адреса обращения принять решение о том, находятся ли требуемые данные в локальной памяти данного узла, или размещаются в памяти удаленного узла. В последнем случае контроллеру удаленной памяти посылается сообщение для обращения к требуемым данным.
Чтобы обойти проблемы когерентности, разделяемые (общие) данные не кэшируются. Конечно, с помощью программного обеспечения можно реализовать некоторую схему кэширования разделяемых данных путем их копирования из общего адресного пространства в локальную память конкретного узла. В этом случае когерентностью памяти также будет управлять программное обеспечение. Преимуществом такого подхода является практически минимальная необходимая поддержка со стороны аппаратуры, хотя наличие, например, таких возможностей как блочное (групповое) копирование данных было бы весьма полезным. Недостатком такой организации является то, что механизмы программной поддержки когерентности подобного рода кэш-памяти компилятором весьма ограничены. Существующая в настоящее время методика в основном подходит для программ с хорошо структурированным параллелизмом на уровне программного цикла.
Машины с архитектурой, подобной Cray T3D, называют процессорами (машинами) с массовым параллелизмом (MPP Massively Parallel Processor). К машинам с массовым параллелизмом предъявляются взаимно исключающие требования. Чем больше объем устройства, тем большее число процессоров можно расположить в нем, тем длиннее каналы передачи управления и данных, а значит и меньше тактовая частота. Происшедшее возрастание нормы массивности для больших машин до 512 и даже 64К процессоров обусловлено не ростом размеров машины, а повышением степени интеграции схем, позволившей за последние годы резко повысить плотность размещения элементов в устройствах. Топология сети обмена между процессорами в такого рода системах может быть различной. На рис.2.10. приведены характеристики сети обмена для некоторых коммерческих MPP.
Для построения крупномасштабных систем альтернативой рассмотренному в предыдущем разделе протоколу наблюдения может служить протокол на основе справочника, который отслеживает состояние кэшей. Такой подход предполагает, что логически единый справочник хранит состояние каждого блока памяти, который может кэшироваться. В справочнике обычно содержится информация о том, в каких кэшах имеются копии данного блока, модифицировался ли данный блок и т.д. В существующих реализациях этого направления справочник размещается рядом с памятью. Имеются также протоколы, в которых часть информации размещается в кэш-памяти. Положительной стороной хранения всей информации в едином справочнике является простота протокола, связанная с тем, что вся необходимая информация сосредоточена в одном месте. Недостатком такого рода справочников является его размер, который пропорционален общему объему памяти, а не размеру кэш-памяти. Это не составляет проблемы для машин, состоящих, например, из нескольких сотен процессоров, поскольку связанные с реализацией такого справочника накладные расходы можно преодолеть. Но для машин большего размера необходима методика, позволяющая эффективно масштабировать структуру справочника.
| Фирма | Название | Коли-чество узлов | Базовая тополо-гия | Разряд-ность связи (бит)Частота синхро-низации (Мгц) Пиковая полоса пропус-кания связи (Мбайт/с) Общая полоса пропус-кания (Мбайт/с) Год выпуска |
| Thinking Machines | CM-2 | 1024-4096 | 12-мер-ный куб | 17 1 1024 1987 |
| nCube | nCube/ten | 1-1024 | 10-мер-ный куб | 110 1.2 640 1987 |
| Intel | iPSC/2 | 16-128 | 7-мерный куб | 116 2 345 1988 |
| Maspar | MP-1216 | 32-512 | 2-мерная сеть+сту-пенчатая Omega | 125 3 1300 1989 |
| Intel | Delta | 2-мерная сеть | 1640 40 640 1991 | |
| Thinking Machines | CM-5 | 32-2048 | многосту-пенчатое толстое дерево | 440 20 10240 1991 |
| Meiko | CS-2 | 2-1024 | многосту-пенчатое толстое дерево | 870 50 50000 1992 |
| Intel | Paragon | 4-1024 | 2-мерная сеть | 16100 200 6400 1992 |
| Cray Research | T3D | 16-1024 | 3-мерный тор | 16150 300 19200 1993 |
Рис.2.10. Характеристики межсоединений некоторых коммерческих MPP
В частности, чтобы предотвратить появление узкого горла в системе, связанного с единым справочником, можно распределить части этого справочника вместе с устройствами распределенной локальной памяти. Таким образом можно добиться того, что обращения к разным справочникам (частям единого справочника) могут выполняться параллельно, точно также как обращения к локальной памяти в распределенной памяти могут выполняться параллельно, существенно увеличивая общую полосу пропускания памяти. В распределенном справочнике сохраняется главное свойство подобных схем, заключающееся в том, что состояние любого разделяемого блока данных всегда находится во вполне определенном известном месте. На рис.2.11. показан общий вид подобного рода машины с распределенной памятью. Вопросы детальной реализации протоколов когерентности памяти для таких машин выходят за рамки настоящего обзора.
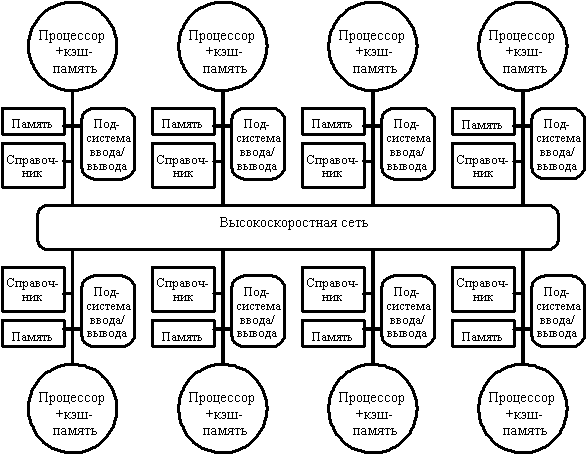
Рис.2.11. Архитектура системы с распределенной внешней
памятью и распределенным по узлам справочником
Дата добавления: 2015-09-29; просмотров: 1145;