Периферійні пристрої
Периферійні пристрої (ПП) комп’ютерів – це пристрої, які функціонально знаходяться поза межами ядра комп’ютера і призначені для уведення, виведення, запам’ятовування, відображення, реєстрації інформації.
Ядро комп’ютера – центральні процесорні пристрої, основну пам'ять, центральні засоби введення/виведення інформації.
Інтерфейси периферійних пристроїв (ПП) – це сукупність правил, які визначають вимоги до електричних, програмних та конструктивних засобів для реалізації взаємодії між пристроями комп’ютера чи комп’ютерної системи. В переважній більшості інтерфейси ПП стандартизовані. Це може бути стандарти на рівні фірм, окремих країн чи міжнародні.
Для забезпечення стандартизації інтерфейс має мати електричну, програмну та конструктивну сумісність.
Електрична сумісність – це узгодженість та структура ліній зв’язку, структури та складу електричних сигналів, їх форми та параметрів, обмеження на відстань між пристроями.
Програмна сумісність – це узгодженість алгоритмів взаємодії між різними компонентами периферійної підсистеми згідно з логічними умовами режимів роботи. Логічні умови режимів роботи визначають формати даних, адрес, команд, станів пристроїв, набори та часові характеристики процедур взаємодії між пристроями.
Конструктивна сумісність – це узгодженість конструктивних елементів, які забезпечують стандартизоване підєднання різних пристроїв в периферійній системі. КС може бути не повною.
1.1 Лінії зв’язків інтерфейсів ПП.
Лінія зв’язку – це середовище, яке забезпечує взаємодію між пристроями через відповідні сигнали. Переважно використовуються електричні сигнали. В деяких випадках використовуються радіосигнали, оптичні і інфрачервоні.
Для передачі електричного сигналу між 2-ма пристроями має бути замкнуте електричне коло у якому електричний струм протікає через провідник від передавача до приймача у прямому напрямку і від приймача до передавача у зворотному напрямку(ці провідники відповідно прямі і зворотні провідники). Зворотні провідники у багатьох випадках об’єднують і використовується одна земля для певної групи провідників. В якості лінії зв’язку інтерфейсів ПП можуть використовуватись:
- Друковані провідники
- Об’ємі провідники
- Коаксіальний кабель.
В коаксіальних кабелях прямим провідником завжди є центральна жила а зворотнім провідником (сигнальною землею) використовується екран. В багатьох інтерфейсах ПП використовується більше ніж 1 прямий провідник (до сотні).
В випадках коли є багато прямих провідників уся сукупність лінії зв’язку інтерфейсу ПП називається магістраллю інтерфейса. В свою чергу магістраль інтерфейса може ділитись на окремі групи ліній зв’язку за функціональним призначенням. Частіше ділить на 3 групи, які називаються шини інтерфейсу, а саме:
- Шина даних.
- Шина адрес.
- Шина управління.
Шина даних призначена для обміну між пристроями, безпосередніми даними які в основному використовуються для обчислювального процесу. Кількість ліній зв’язку у шині даних в переважній більшості кратна байту. Найчастіше це 1-о та 2-о байтові шини даних, рідше 3-ох, 4-ох, 6-ох, 8-ох. В деяких інтерфейсах для по-тактового, по-байтового контролю на непарність у шині даних використовується спеціальна лінія зв’язку.
Шина адрес призначена для обміну піж пристроями, кодами номерів ПП та портів введення/виведення, кодів комірок пам'яті. Використовуються двійкові адресні коди і кількість ліній зв’язку у шині адрес визначає так званий адресний простір інтерфейсу, якщо N це кількість ліній зв’язку ліній адрес то адресних простір буде 2N.
Шина управління включає лінії зв’язку через які пристрої обмінюються сигналами управління, використовуються для загального управління магістраллю, обміном даними, адресами, командами, інформацією про стан, контролю правильності функціонування інтерфейсної магістралі.
1.2 Способи з’єднання ПП в системах.
Використовуються 3 базові способи з’єднання:
- Радіальний
- Магістральний
- Ланцюговий
Однак на практиці з’єднання пристрою відносять до цього способу, за яким реалізовано з’єднання переважної більшості ліній зв’язку.
Радіальний передбачає з’єднання тільки двох пристроїв, коли один із них є каналом введення/виведення комп’ютера а другий є ПП.
Переваги: Таке з’єднання відзначається простотою реалізації, забезпечує можливість високої продуктивності обміну інформації, високі показники надійності.
Недолік: Великі затрати на фізичні лінії зв’язку а також складність реалізації периферійної підсистеми із великою кількістю ПП.
Магістральний передбачає використання спільної магістралі до якої короткими відведеннями під’єднуються пристрої. Теоретично кількість пристроїв не обмежується. Практично це кількість обмежується функціональними можливостями магістральних формувачів та приймачів. Крім цього велика кількість пристроїв на магістралі веде до непродуктивного використання пристроїв, оскільки вони змушені витрачати багату часу на очікування в обміні інформацією через магістраль.
Переваги: відносна простота реалізації периферійних підсистем. Для кількості пристроїв яка не перевищує 20 шт. а також мінімізацією затрат на фізичну реалізацію лінії зв’язку.
Ланцюговий спосіб передбачає під’єднання один за одним ПП у периферійній підсистемі із використанням спеціальних комутаційних вузлів у кожному пристрої.
Переваги і недоліки: суттєвих немає і використовується рідко у спеціалізованих комп’ютерних системах
1.3 Основні технічні характеристики інтерфейсів ПП.
- Швидкість обміну даними в установленому режимі. Вимірюється в кількості інформації, якою можуть обмінюватись пристрої за 1 секунду. Відповідно це можуть бути біти, Кбіти, Мбіти або байти, Кбайти, Мбайти. Цю характеристику ще називають продуктивність.
- Кількість периферійних пристроїв, яка можу бути у периферійній підсистемі. Може лежати в широких межах від 1 до 2048 ПП.
- Максимальна відстань між ПП у периферійних системах. Від десятків см до десятків кілометрів.
- Якісна характеристика – це складність апаратних та програмних засобів для реалізації периферійної підсистеми, яка немає прямого показника а вимірюється через вартість.
1.4 Характеристики - класифікаторів інтерфейсів ПП.
- За способом з’єднання компонент у периферійній підсистемі (інтерфейси:радіальні, магістральні, ланцюгові).
- За способом обміну даними: послідовні у яких за один такт в одному напрямку може передаватись тільки один біт даних; паралельний інтерфейс у якому за один такт в одному напрямку може передаватись 2-а або більше біт даних.
- За режимами обміну даними: симплексний - коли інтерфейс забезпечує можливість обміну даними лише в одному напрямку і одним з пристроїв є передавачам а інший приймачем; дуплексний - інтерфейс забезпечує можливість обміну даними у двох напрямках через різні лінії зв’язку; напівдуплексні - інтерфейс забезпечує обмін даними в обох напрямках через одні і ті ж лінії зв’яжу в режимі розподілу часу.
- Спосіб синхронізації обміну: синхронний - синхронізація спеціальними сигналами; асинхронний - організація обміну з використанням сигналів управління типу запит-відповідь або з використанням спеціальних стартових синхронізуючих сигналів передавача.
Використання цих 4 класифікаційних ознак забезпечує подання/характеристику основних властивостей інтерфейсу ПП. Наприклад класифікація інтерфейсу що він радіальний, паралельний, напівдуплексний асинхронний однозначно відносить його до певного класу інтерфейсів ПП. За цими класифікаційними ознаками можна визначити основі особливості практично усіх інтерфейсів ПП.
Лекція 2.1. Основні характеристики, склад і призначення ліній зв'язку, особливості обміну інформацією і виконання основних операцій інтерфейсів ЗШ, Q-bus, ISA, EISA
1.Інтерфейс загальна шина фірми DEC.
Це перший магістральний системний інтерфейс, який знайшов масове застосування у комп’ютерах подальшим розвитком попереднього інтерфейсу. Це магістральний, паралельний, напівдуплексний асинхронний інтерфейс.
На магістралі можуть взаємодіяти пристрої двох типів: активний ; пасивний;
Активний пристрій, який в даний момент часу керує магістраллю і який ініціює обмін з іншим так званим пасивним пристроєм. Активні пристрої часто називають замовниками, пасивні виконавцями.
Теоретично загальна кількість на магістралі не обмежується. Однак практично ця кількість є відносно невеликою і обмежується в першу чергу навантажувальними можливостями магістральних формувачів. Переважно ця кількість пристроїв не перевищує 20. Необмежене збільшення кількості пристроїв веде до неефективного їх використання так як тоді багато пристроїв мають очікувати на надання їм магістралі. Загальна шина має три групи лінії зв’язку які формуються за функціональними ознаками.
- Це такі групи лінії зв’язку які називаються шиною адрес (ША).
- Друга група це шина даних яка називається (ШД).
- Третя група це шина управління (ШУ)
Узагальнена структурна схема (приводиться структурна схема) має такі компоненти ПРЦ – центральний процесор; АРБ – схема арбітражу; МОП – Модулі основної пам’яті; КВВ – контролери/канали введення/виведення; ПП – периферійні пристрої.
Шина адрес має 18 основних ліній зв’язку та 8 додаткових для сторінкової організації пам’яті. Шина даних має 16 основних ліній зв’язку та 2 додаткові для побайтового контролю пам’яті.
Отже інтерфейс має можливість двобаштового паралельного обміну інформацією, можливий також однобайтовий режим. Шина управління має лінії зв’язку які використовуються для управління безпосередньо обміном інформацією, арбітражу, переривань, загального управління магістраллю і контролю за її станом. В периферійній підсистемі може бути декілька активних пристроїв. Модулі основної пам’яті відносяться до групи пасивних пристроїв. Декілька активних пристроїв в певний момент часу можуть одночасно сформувати запити на захоплення магістралі і для усунення такої конфліктної ситуації в інтерфейс введена схема арбітражу. До цього інтерфейсу розроблена оригінальна схема арбітражу із застосуванням пріоритетності пристроїв на магістралі. Застосована 6-рівнева пріоритетна схема арбітражу із монтажним встановленням пріоритетів на кожному рівні. В інтерфейсі всього 6 пріоритетних рівнів, в тому числі рівень прямого доступу до пам’яті. Це є рівень ППД(прямого доступу до пам’яті) має найвищий пріоритет. На кожному рівні може бути кілька пристроїв пріоритет яких визначається монтажним під’єднанням до схеми арбітражу. Від схеми арбітражу виходить, для кожного рівня, сигнал дозволу захоплення магістралі і цей сигнал ланцюговим способом проходить через усі пристрої даного рівня. В кожному із пристроїв є на цій лінії комутаційний елемент із нормально замкнутим контактом для випадку коли пристрій не виставляє запиту на захоплення магістралі. Якщо пристрій виставляє запит то тоді контакт перемикача розмикається і відповідно перший під’єднаний пристрій до схеми арбітражу має найвищий пріоритет а наступні пристрої зменшують свій пріоритет на одиницю. Арбітраж відбувається коли магістраль вільна (тобто відсутній сигнал зайнятості магістралі). За сигналами синхронізації пристрої подають запити на захоплення магістралі до схеми арбітражу, яка аналізує ці запити і формує сигнал дозволу на захоплення магістралі для найбільш пріоритетного рівня і на цьому рівні сигнал дозволу доходить до найбільш пріоритетного пристрою, який сформував запит на захоплення магістралі. Цей пристрій формує сигнал зайнятості магістралі і починає взаємодіяти із пасивним пристроєм. Після завершення обміном інформацією знімається сигнал зайнятості магістралі і починається наступний цикл арбітражу. Номінальна швидкість обміну інформацією для даного інтерфейсу 4 Мбайт/сек. а максимальна відстань між пристроями до 15 метрів. В сигналах рівнів ТТЛ використовуються прямі та інверсні сигнали. Цей інтерфейс започаткував використання та створення багатьох нових магістральних інтерфейсів.
2. Інтерфейс Q-bus (МПІ).
МПІ – між модульний паралельний інтерфейс. Цей інтерфейс створений на основі інтерфейсу «загальна шина». Основною метою створення цього інтерфейсу була мінімізація загальної лінії зв’язку в інтерфейсі і можливість його застосування в мікроЕОМ та цифрових системах керування. Також розроблений фірмою DEC.
Це магістральний, паралельний, напівдуплексний, асинхронний інтерфейс. Загальна магістраль (ЗМ) цього інтерфейсу має 2 групи лінії зв’язку:
- Мультиплексована шина адрес даних (ША/ШД)
- Шина управління(ШУ).
Узагальнена структурна схема з’єднань пристроїв (приводиться схема).
Шина ША/ШД має 16 основних ліній зв’язку, які в різні моменти часу можуть використовуватись для обміну кодами адрес та даними. Ця шина має 8 додаткових ліній зв’язку для адресної інформації для сторінкової організації пам’яті. Шина управління має лінії зв’язку для управління арбітражем безпосереднім обміном даними для переривань, управління станом магістралі. Тут застосований 4-рівневий арбітраж. Введена можливість переривань від зовнішнього джерела, що сприяє можливості використання цього інтерфейсу в цифрових системах керування. Оскільки є мультиплексованою ША/ШД то безпосередня взаємодія між пристроями відбувається за два послідовні у часі етапи.
На першому замовник формує код адреси пасивного пристрою і встановлює логічний зв'язок з ним.
На другому етапі відбувається безпосередній обмін даними за рахунок зменшення загальної кількості лінії зв’язку в даному інтерфейсі і зменшена його продуктивність. Номінальна швидкість обміну для даного інтерфейсу 2Мбайт/сек. максимальна відстань між пристроями обмежена в 0,5 метра. Передбачена можливість використання шинних формувачів на 3 стани. Для рівні сигналів ТТЛ використовується пряма та інверсна логіка. Для цього інтерфейсу є серійні мікросхеми контролерів та адаптерів інтерфейсу. Контролер забезпечує взаємодію між системною магістраллю комп’ютера та інтерфейсною магістраллю а адаптери забезпечують взаємодію між інтерфейсною магістраллю і електронними вузлами периферійних пристроїв.
3. Інтерфейс ISA (Industry Standard Architectury).
Інтерфейс розроблений IBM під назвою Multy Bus. У зв’язку із масовим застосуванням інтерфейсу він був вдосконалений і названий ISA.
Первинне його призначення це системний інтерфейс персональних комп’ютерів а в даний час використовується як периферійний інтерфейс.
Це магістральний, паралельний, напів-дуплексний, асинхронний інтерфейс. Інтерфейс паралельний двобаштовий є варіант 1-байтового інтерфейсу який називається ISA8 або xBUS.
Інтерфейс має 3 шини адрес даних управління. Схема з’єднання пристроїв для цього інтерфейсу відповідає схемі загальної шини фірми DEC (3-ох шинна магістраль).
Адресна шина має 24 лінії зв’язку, що передбачає використання адресного простору 16 Мега-адрес. Адресний простір розділено на 2 частини одна з яких невелика на початкових адресах передбачена для використання портами та каналами(контролерами) введення/виведення. Решта адресного поля передбачена для адресування комірок пам’яті переважно 1-байтових. Шина даних має 16 ліній зв’язку, що забезпечує 1-байтовий чи 2-байтовий обмін даними. Шина управління має лінії зв’язку, які використовуються для арбітражу, безпосереднього управління даними, для переривань, підтримки динамічної пам’яті, загального управління магістралю.
Інтерфейс передбачає можливість використання послідовного, паралельного арбітражів та програмного управління обміном. Послідовний арбітраж є децентралізованим при цьому не використовуються центральні засоби арбітражу. Арбітраж побудований на фіксованому (монтажному) з’єднані сигналу дозволу захоплення магістралі який ланцюговим способом проходить через усі пристрої. Перший пристрій у ланцюгу має найвищий пріоритет а наступні зменшуються свій пріоритет на одиницю. Комутуючі елементи кожного пристрою забезпечуються вибірку найбільш пріоритетного пристрою. Недолік цього арбітражу є неможливість оперативної зміни алгоритму обслуговування запитів пристроїв.
Цей недолік усуває паралельний арбітраж із центральною схемою арбітражу до якої приходять запити від пристроїв а центральна схема арбітражу посилає дозвіл на захоплення магістралі тільки одному пристроєві у відповідності із прийнятою дисципліною обслуговування, яка може програмно змінюватись. Найбільш поширеним є циклічне обслуговування запитів із оперативною зміною пріоритетів. Пристроєві, якому надана в даний час магістраль, встановлюється найнижчий пріоритет (тобто ставиться в кінець черги) а іншим пристроям, які до цього мали нижчий пріоритет, покращується рівень пріоритету на одиницю. Наприклад обслуговується 8 пристроїв, магістраль надана 5 пристроєві за пріоритетом, йому встановлюється 8 пріоритет (найгірший) а 6 встановлюється 5, 7 встановлюється 6, 8 встановлюється 7.
При програмному управлінні обміну використовується 15 запитів на переривання на які може видаватись тільки один дозвіл у відповідності із пріоритетністю запиту. Можливі 2 процедури переривань:
- векторна;
- безвекторна;
При векторній процедурі переривань пристрій запиту переривань виставляє адресу вектору переривань на шину даних. При безверкторній процедурі переривань адреса вектора переривань пристроєм на шину даних не виставляється а ця адреса береться із фіксованої області пам’яті, яку називають таблицею пріоритетних переривань або блоком пріоритетних переривань. В цьому інтерфейсі застосовується дві пари сигналів ідентифікації операції запису/читання даних. Одна пара сигналів для звернень до портів та контролерів введення/виведення а друга пара сигналів управління запису/читання для звернень до комірок пам’яті. Це забезпечує швидку ефективну організацію обміну даними. Активний пристрій замовник формує адресу пасивного пристрою виконавця, формує керуючий сигнал запису чи читання, при записі передає дані виконавцю, при читанні приймає дані від виконавця. Виконавець має підтвердити закінчення операції відповідним керуючим сигналом і уся операція відбувається за 1 такт синхросигналу.
Інтерфейс підтримує можливість використання динамічної пам’яті, тобто її циклічну регенерацію.
Для інтерфейсу передбачена конструктивна сумісність, використовуються стандартні з’єднувачі коли розетки встановлюються на об’єднувальних чи материнських платах а з’єднувачі вилки виконуються друкованим монтажем безпосередньо на платах. Сигнали рівнів ТТЛ використовуються прямі та інверсні сигнали.
4. Інтерфейс EISA.
Це розширений стандарт індустріальної архітектури, тобто подальший розвиток інтерфейсу ISA. Первинне призначення це інтерфейс комп’ютера а в подальшому периферійний інтерфейс або інтерфейс розширення. Це магістральний, паралельний, напівдуплексний, асинхронний інтерфейс. Розширеними є шина адрес до 32 ліній зв’язку, що забезпечує 4-Гігаадресне поле. Шина даних розширена до 32 ліній зв’язку, що забезпечує можливість обміну 4-, 2-, 1-байтними даними, дещо розширена шина управління забезпечує можливість використання на шині декількох процесорів. Вдосконалений прямий режим доступу до пам’яті (DMA). Вдосконалена підтримка динамічної організації пам’яті, покращений загально-системний контроль за роботою магістралі. Передбачена конструктивна сумісність. У з’єднувачах збільшена кількість контактів і вони реалізовані таким чином що плати(тези) ISA можуть встановлюватись у з’єднувачі EISA і нормально функціонувати а зворотної сумісності немає. Використовується пряма та інверсна логіка. Інші характеристики аналогічно до ISA.
Лекція 2.2. Основні характеристики, склад і призначення ліній зв'язку, особливості обміну інформацією і виконання основних операцій інтерфейсів ІРПР, ІРПР-М, ІЕЕЕ-488, ІРІ
1. Інтерфейс BS-4421 (ІРПР -інтерфейс радіальний паралельний).
Призначений для під’єднання до комп’ютера швидкодіючих друкуючих пристроїв.
Це радіальний, паралельний, симплексний, асинхронний інтерфейс. Інтерфейс забезпечує взаємодію між контролером який є складовою частиною комп’ютера і передавача даних та периферійним пристроєм, яким є приймачем даних. Інтерфейс на магістраль має 2 шини: даних і управління. Шина даних має 16 основних ліній зв’язку, які забезпечуються 2-байтовий обмін даними та 2 додаткових ліній зв’язку, для побайтового контролю на непарність. Шина управління має 4 лінії зв’язку для безпосереднього управління обміну даними. 8 ліній зв’язку для передачі інформації про стан від приймача до передавача і 8 ліній зв’язку для передачі інформації про стан в зворотному напрямку.
Інтерфейс використовує досить простий алгоритм взаємодії пристроїв, номінальна швидкість обміну даними 800Кбайт/сек., максимальна відстань між пристроями 15 метрів. Сигнали рівнів ТТЛ переважно інверсна логіка. Конструктивна сумісність неповна.
2. Centronics (ІРПР-М інтерфейс радіальний паралельний модифікований).
Це модифікація інтерфейсу BS-4421. Призначений для під’єднання до комп'ютера порядкових принтерів (менш продуктивних ніж в попередньому інтерфейсі). Це радіальний, паралельний, симплексний, асинхронний інтерфейс. Інтерфейс передбачає взаємодію контролера, який є складовою частиною комп’ютера і передавачем, і приймачем даних.
Магістраль інтерфейсу має 2 шини: даних та управління.
ШД має 8 ліній зв’язку, що забезпечує паралельний 1-байтовий обмін даними. ШУ має лінії зв’язку для забезпечення управління обміну даними а також для управління і контролю за режимами друкуючого пристрою в тому числі автоматичне переведення паперу на 1 рядок, контроль за станом паперу, контроль за правильністю функціонування друкуючого пристрою. До ШУ входять 8 ліній зв’язку для передачі інформації про стан від приймача(периферійний пристрій) до передавача (контролер). Алгоритм взаємодії відносно простий. Номінальна швидкість обміну 400Кб/сек., максимальна відстань між пристроями до 5 метрів, сигнали ТТЛ пряма та інверсна логіка.
Інтерфейс реалізований в персональних комп’ютерах як LPT порт (порт лінійного принтер). Цей порт реалізований як програмований канал уведення/виведення і може функціонувати за декількома протоколами обміну. Основним є протокол Centronics.
3. Інтерфейс IEEE-488 (GPIB) (ПШЗП приладна шина загального призначення).
Цей інтерфейс призначений для побудови периферійних підсистем інформаційно-вимірювального призначення. В багатьох вимірювальних приладах фірм Philips, Siemens та інші. Інтегровані адаптери цього інтерфейсу, що робить доступною побудову периферійних підсистем на основі цього інтерфейсу.
Це магістральний, паралельний, напівдуплесний, асинхронний інтерфейс. На магістральній може взаємодіяти до 16 пристроїв із них один має бути контролером а 15 периферійними пристроями. Магістраль має дві шини: шина інформаційна і шина управління.
Інформаційна шина має 8 ліній зв’язку, через які забезпечуються 1-байтовий обмін даними, обмін адресними кодами, командами, інформаціями про стан пристроїв.
Шина управління має теж 8 ліній зв’язку. Три із яких використовуються для безпосереднього управління обміном інформацією. А 5 для загального управління взаємодією пристроїв.
Контролер реалізовує програмне управління периферійної підсистеми. Для цього в інтерфейсі передбачена оригінальна система команд, яка включає 5 типів команд: універсальні ; адресні; передавання; приймання; вторинні.
Система команд забезпечує можливість групового управління пристроями, взаємодію між пристроями із використанням повідомлень. Інтерфейс може забезпечувати взаємодію між двома периферійними пристроями. Для цього контролер спеціальними командами передає на короткий час управління магістраллю одному із периферійних пристроїв. Максимальна відстань між пристроями може досягати до 20 метрів. Номінальна швидкість обміну 1 Мбайт/сек. Однак ця швидкість може бути різною, переважно меншою в залежності від відстані між пристроями, від типу магістральних формувачів, від кількості пристроїв в периферійній підсистемі. Сигнали рівнів ТТЛ використовується пряма та інверсна логіка.
Інтерфейс IPI (Інтелектуальний периферійний інтерфейс ІПІ).
Призначений для побудови периферійних підсистем середньої і високої продуктивності.
Це магістральний, паралельний, дуплексний/напівдуплексний асинхронний інтерфейс. Метою створення інтерфейсу було універсалізація взаємодії пристроїв для широкого класу периферійних пристроїв.
Інтерфейс використовує 4-ох-рівневу базову архітектуру, яка встановлює наступні особливості інтерфейсу:
Рівень 0 – встановлює вимоги до ліній зв’язку, магістральний передавачів та приймачів до з’єднувачів.
Рівень 1 – вимоги до шинного протоколу взаємодії пристроїв та опрацювання їх станів.
Рівень 2 – вимоги до команд, що залежать від типу пристрою, фізичне адресування, фізичні томи, команди передачі управління на магістралі.
Рівень 3 – вимоги до команд загальних для конкретного типу пристроїв, обмежена кількість специфічних команд, буферизація інформації, стек команд, обслуговування черг запитів, логічне адресування, пакети повідомлень,узагальнені вимоги до фізичних томів.
Архітектура є відкритою і дозволяє збільшувати кількість рівнів. Одним із варіантів є використання рівня 4 для встановлення вимог до файлових структур даних.
Магістраль інтерфейсу має інформаційну шину та шину управління. В свою чергу інформаційна шина має шини А та Б. Кожна із шин А та Б має 8 основних ліній зв’язку та 9 по-байтового контролю на непарність.
Шина А призначена для передавання від замовника до виконавця керуючої інформації, байта даних в 1-байтовому режимі обміну, 1 байту при 2-байтовому обміні.
Шина Б призначена для передавання від виконавця до замовника керуючої інформації. Байта даних в 1-байтовому режимі обміну, 2-го байту при 2-байтовому режимі обміну.
Шина управління має невелику кількість ліній зв’язку (6), причому дві із них використовується для ідентифікації інформації виконавця та замовника, а 4 використовується для управління режимами роботи магістралі.
Основною особливістю є гнучке використання шин А та Б, що створю широкі функціональні можливості для різних режимів взаємодії між пристроями на магістралі.
На основі базових вимог та особливостей розробляються окремі версії інтерфейсу для конкретного типу пристрою. На даний час розроблено ряд версій цього інтерфейсу для найбільш розповсюджених периферійних пристроїв (оптичних, магнітних накопичувачів, мережевих карт, друкуючих пристроїв).
Основним недоліком цього інтерфейсу є несумісність програмних драйверів з програмними драйверами найбільш розповсюджених інтерфейсів і тому впровадження цього інтерфейсу на даних час не узгоджено з провідними комп’ютерними фірмами.
Лекція 2.3. Основні характеристики, склад і призначення ліній зв'язку, особливості обміну інформацією і виконання основних операцій інтерфейсів АТА
ATA (AT Attachment for Disk Drives).
Інтерфейс призначений для підключення до ядра комп’ютера дискових накопичувачів. Розроблений в 1986 році, постійно модифіковувався і на даний час є конкурентоздатним. Це паралельний, радіальний, напівдуплексний асинхронний інтерфейс. Основною метою створення цього інтерфейсу було наближення електронних вузлів управління до дискових накопичувачів і ця технологія отримала назву IDE(Integrated Device Electronic). Інтерфейс створювався для персональних комп’ютерів на базі інтерфейсу ISA. І основні технічні рішення орієнтовані на цей інтерфейс. Інтерфейс є узгоджуючою ланкою між системним інтерфейсом комп’ютера та дисковими накопичувачами. При розробці інтерфейсу використані наступні схемо технічні та алгоритмічні рішення: шина даних ISA використана повністю, тобто в первинному варіанті це 16 розрядний паралельний інтерфейс. Шина адрес (ША) три наймолодші розряди передаються безпосередньо в інтерфейсну магістраль. Старші розряди адрес разом із сигналом ідентифікації звернення до портів введення/виведення поступають на дешифратор, який формує 2 сигнали вибірки пристрої ChipSelect0 та ChipSelect1. Із шини управління ISA використані сигнали запису/читання портів введення/виведення, управління розрядністю даними, переривання, прямого доступу до пам’яті. Інтерфейс передбачає використання host-адаптера (контролер). Двох дискових накопичувачів і жгута шлейфа із 3 40-контактними стандартизованими з’єднувачами. Вибіркою дискових накопичувачів управляють сигнали ChipSelect0 та ChipSelect1. Дисковим накопичувачам відповідно присвоюються номер пристрій 0 та пристрій 1.
Пристрій 0 управляється сигналом ChipSelect0 і він є провідним пристроєм інтерфейсу (пристрій Master) а пристрій 1 управляється сигналом ChipSelect1 і є вторинним пристроєм (Slave). Якщо в комп’ютері використовується лише один пристрій то він має бути 0 (Master). Для програмного управління дисководами розроблена оригінальна система команд на основі якої створюються драйвери накопичувачі. При адресації використана, так звана, трьохмірна дискова адресація CHS (циліндр, головка, сектор). В подальшому із розвитком дискових накопичувачів введена лінійна блокова адресація LBA із розширеними функціональними можливостями.
За час використання інтерфейсу створено декілька модифікацій, до основних відносять наступні:
- ATA
- ATA-2 (це фактично 2-канальний інтерфейс ATA, який дозволяє під’єднувати 4 дискові накопичувача),
- Fast ATA-2 (це вдосконалений ATA-2, орієнтований на підвищення швидкості обміну до 13,3 МБ/сек.),
- ATA-3 ( це подальше вдосконалення Fast ATA-2 із покращеними засобами управління інтерфейсом, введенням парольного захисту, засобів самодіагностування),
- ATAPI-4 (це подальше вдосконалення щодо швидкості обміну, за рахунок введення потокового режиму обміну даними, швидкість до 33,3 МБ/сек),
- SATA (послідовний ATA орієнтований на зменшення кількості ліній зв’язку за рахунок використання високочастотних електричних сигналів, які передаються послідовними кодами через спеціальні лінії зв’язку).
Усі версії інтерфейсів ATA характеризуються відносною простотою технічних і програмних засобів і відповідно їхньою низкою вартістю при достатньо високих функціональних можливостях та високій швидкості обміну. Недоліком цього інтерфейсу є можливість застосування лише 4 накопичувачів і спрямування цього інтерфейсу на дискові накопичувачі.
Особливості основних команд та побудова драйверів (приклади граф-схем алгоритмів)
Лекція 2.4. Основні характеристики, склад і призначення ліній зв'язку, особливості обміну інформацією і виконання основних операцій інтерфейсів SCSI
SCSI (Small Computer System Interface).
Цей інтерфейс призначений для побудови периферійних підсистем середньої і високої продуктивності. Перша версія розроблена в 1986 році а потім доповнена також новими версіями. За визначенням це магістральний, паралельний, напів- дуплексний асинхронний інтерфейс. Інтерфейс передбачає взаємодію host - контролера, який є складовою частиною комп’ютера і периферійних пристроїв, які підключаються до магістралі. Магістраль інтерфейсу має шину даних і шину управління (ШД та ШУ). Стандартом передбачено 3 основні версії SCSI, SCSI2, SCSI3. Ці версії відрізняються в першу чергу розрядністю шини даних і відповідно до цього кількістю периферійних пристроїв, що можуть під’єднуватись до магістралі. У SCSI 8-розрядна шина даних, що забезпечує паралельний 1-байтовий обмін даними. В цьому інтерфейсі застосовано управління вибіркою пристроїв лініями зв’язку шини даних. Для кожної лінії зв’язку ШД закріплено 1 периферійний пристрій і в режимі вибірки пристроїв сигналом на певній лінії зв’язку ШД вибирається периферійний пристрій. Таким чином в периферійній системі інтерфейсу SCSI може бути до 8 пристроїв.
SCSI-2 має 16-розрядну шину даних і для цього інтерфейсу в периферійній підсистемі може бути до 16 пристроїв.
SCSI-3 має 32-розрядну шину даних що забезпечує паралельний 4-байтовий обмін даними. Периферійна підсистема SCSI-3 може мати до 32 пристроїв.
Інтерфейси можуть працювати в 4 основних режимах, які відрізняються тактовою частотою (по відношенню один до одного кратністю 2) і відповідно швидкістю обміну. Номінальна тактова частота в мегагерцах SCSI 5, SCSI-2 10, SCSI-3 20.
Відповідно швидкості обміну інформацією в МБ/сек. для кожного із інтерфейсів і для відповідних режимів приведені в таблиці 1.2.
Таблиця.1.2.
| Nominal (номінальний) | Fast (швидкий) | Ultra (надшвидкий) | Ultra-2 (надшвидкий 2) | |
| SCSI | ||||
| SCSI-2 | ||||
| SCSI-3 |
Для взаємодії між пристроями використані досить складні алгоритми із використанням так званих фаз магістралі. Використовується 4 фази для логічного під’єднання пристроїв до магістралі а саме:
- Вільна магістраль
- Арбітраж
- Добір пристроїв
- Передобір пристроїв
4 фази використовуються для обміну інформації між пристроями, це такі фази:
- Команди
- Стан
- Дані
- Повідомлення
Фази Дані і Повідомлення мають 2 режими:
- Дані введення
- Дані виведення
Для реалізації програмного управління розроблена оригінальна система команд, на основі якої створюються програмні драйвери пристроїв.
Позитивні сторони цього інтерфейсу:
- Висока продуктивність інтерфесу
- Можливість формування периферійних підсистем із великою кількістю периферійних пристроїв (до 16 пристроїв SCSI-2).
Недоліком є:
- Складність взаємодії пристроїв
- Висока вартість апаратно-програмних засобів
Особливості основних команд та побудова драйверів (приклади граф-схем алгоритмів)
Лекція 3.1.Основні характеристики, склад і призначення ліній зв'язку, особливості обміну інформацією і виконання основних операцій інтерфейсів RS-232C, CL
1. Інтерфейс RS-232C
Інтерфейс призначений для побудови засобів та систем передачі інформації і орієнтований в першу чергу на взаємодію комп’ютера з модемом (модулятором, демодулятором сигналу). За класифікаційними ознаками це радіальний, послідовний, дуплексний, асинхронний інтерфейс. Інтерфейс забезпечує взаємодію контролера комп’ютера із одним ПП. Крім модемів це може бути друкуючі пристрої, інший комп’ютер та довільний ПП із великою кількістю обміну. Номінальна швидкість обміну 9600 біт/сек. Інтерфейс може обмінюватись із різними швидкостями обміну більшими і меншими від номінального. Якщо зменшувати швидкість у 2 рази, то отримаємо найменшу стандартну швидкість у 75 біт/сек. Також є 2 нестандартні швидкості обміну 50 та 100 біт/сек. коли обмін синхронізується частотою мережі 220В 50Гц. Швидкість обміну може збільшуватись від номінальної і є ряд стандартних швидкостей обміну 14400, 19200 і до 115600 біт/сек. Інтерфейс передбачає використання напругових сигналів якими обмінюються пристрої на вхідних/вихідних лініях зв’язку інтерфейсу. Для живлення вихідних каскадів інтерфейсу передбачена напруга в +15В і -15В. інтерфейс передбачає використання прямих та інверсних логічних сигналів. Дані в цьому інтерфейсі передаються через інверсну логіку. Логічна одиниця для передавача кодується напругою в межах -5В -15В, для приймача від -3В до -15В. Логічний нуль для передавача кодується +5В до +15В і для приймача від +3В до +15В. Сигнали управління у прямій логіці.
В інтерфейсі використовується магістраль, яка має дві шини:
1. Шина даних (Шина даних має дві лінії зв’язку).
2. Шина управління (шість ліній зв’язку і відповідні сигнали управління).
В інтерфейсі передбачено конструктивну сумісність і рекомендовано використовувати стандартні з’єднувачі із 25 або 9. Рекомендовано стандартне під’єднання сигналів згідно стандартів в таблиці 1.1.
Таб.1.1
Основні сигнали інтервейсу
| Контакти | Позначення | Призначення |
| PG | Захисне заземлення або екран | |
| -TxD | Інверсний сигнал даних від передавача | |
| -RxD | Інверсний сигнал даних до приймача | |
| RTS | Запит передавача | |
| CTS | Скидання передавача | |
| DSP | Готовність приймача | |
| SG | Сигнальна земля | |
| DCD | Виявлення (знаходження) несучої частоти сигналу | |
| DTR | Готовність терміналу | |
| RI | Покажчик викликів, який активізується модемом коли модем отримує виклик через телефону лінію |
Типи з’єднувачів DB25P, DB25S, DB9P, DB9S.
З’єднання між пристроями за допомогою цього інтерфейсу реалізовується за 2 основними схемами:
1. З’єднання сигналів по схемі один до одного коли використовуються модеми.
2. З’єднання навхрест TxD до RxD , RxD до TxD
Використовується також нестандартне з’єднання для тестування засобів інтерфейсу для використання так званих тестових з’єднувачів. Коли з’єднуються контакти 2 з 3, 4 з 5, 6 з 8 з 20 (рис.1). Тоді засоби інтерфейсу працюють самі на себе і легко перевірити засоби інтерфейсу.
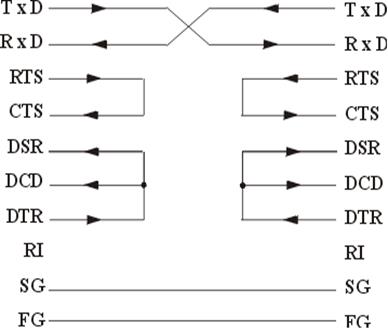
Рис.1. Схема 4-провідної лінії зв'язку для RS-232C
Взаємодія між пристроями реалізується за 2 основними підходами:
1. При апаратному управлінні використовується відповідні лінії зв’язку та сигнали управління 4, 5, 6, 8, 20, 22. Таке управління забезпечує мінімальні непродуктивні втрати, однак вимагає використання усіх ліній зв’язку магістралі.
2. Програмне управління використовує тільки 2 лінії зв’язку 2 і 3. Є стандартні протоколи програмного управління із використанням інформаційних повідомлень через лінії 2 і 3. Таке управління вимагає більших непродуктивних затрат, тобто зменшення продуктивності інтерфейсу. Однак можна економити на лініях зв’язку використовуючи тільки сигнальні 2 і 3 і сигнальну землю і захисну землю.
Інтерфейс передбачає можливість обміну в різних режимах функціонування комп’ютера та периферійного пристрою. Ці режими встановлюються перед початком взаємодії пристроїв так званим програмування контролерів комп’ютера і ПП. Обмін даними реалізовується окремими словами, які мають мати стандартний формат ( рис.2).
Приймання і передавання відбувається за тактом T=1/Uобм. І тривалість такту залежить від швидкості обміну інформації Uобм. Якщо U=9600 то T =1/9600. Приймач через інтервал часу t/2 аналізує наявність мінусової напруги на лінії зв’язку даних. Якщо мінусова напруга є тоді приймач приймає рішення що йому передається слово і в наступних тактах посередині кожного такту фіксує логічний 0 чи 1. За стартом (триває 1 такт) йде поле даних. Поле даних може мати 5, 7 або 8 тактів (відповідно біт). За полем даних йде поле контролю (1 такт або 1 біт). Контроль може бути на парність/непарність і в деяких режимах контроль може бути відсутнім. Після поля контролю іде поле закінчення слова (стоп) тривалістю 1, 1.5 або 2 такти. При полі стоп сигнал завжди плюсовий. Ці режими програмуються перед початком взаємодії пристрою.
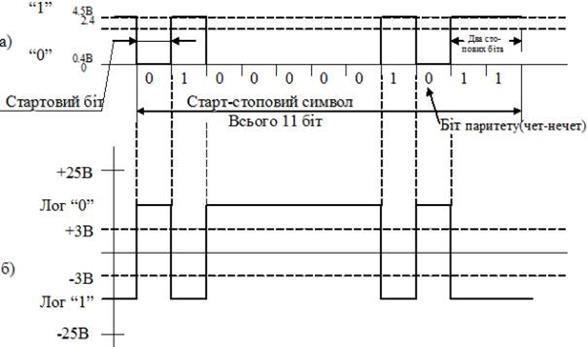
Рис.2. Часова діаграма передачі одного слова.
Для реалізації засобів цього інтерфейсу серійно випускаються ВІС контролерів RS232. Є різні типи таких серійних ВІС. Одні в ВІС може бути 1, 2, 4 контролери. Ці ВІС функціонують зі сигналами від 0В до 5В. Тому між контролерами і лініями зв’язку встановлюється спеціальні мікросхеми перетворювачів рівнів RS->ТТЛ та ТТЛ-> RS.
Цей інтерфейс реалізований як COM-порти персональних комп’ютерів.
2.Інтерфейс CL (Current Loop).
Це інтерфейс який призначений для передачі даних на великій відстані до 1200м. В цьому інтерфейсі використано багато алгоритмічних рішень інтерфейсу RS232 і він теж радіальний, послідовний, дуплексний, асинхронний. За режимами функціонування він аналогічний RS232 (ці ж швидкості обміну), аналогічний формат слів. Основною відмінністю є електричні сигнали, які в цьому інтерфейсі струмові.
Для логічної зв’язку використовується індивідуальні 2 провідники один з яких вважається прямим від передавача до приймача а другий зворотній від приймача до передавача. Ці два провідники утворюють струмову петлю, яка у цьому інтерфейсі може бути двох типів:
- 20 мА. При цьому логічна одиниця кодується величиною струму від 15-25 мА а логічний нуль 0-3 мА.
- 40 мА. При цьому логічна одиниця кодується струмом 30-50мА, а нуль від 0-5мА.
Кожна лінія зв’язку має гальванічну розв’язку від електронних вузлів комп’ютера та ПП. В багатьох випадках гальванічна розв’язка реалізовується на оптоволоконних парах. Ці мікросхеми називаються оптрони.
В інтерфейсі, як правило, використовується тільки 2 лінії зв’язку (TXD та RXD). Тому використовується програмне управління обміну інформації між пристроями. При невеликих відстанях між пристроями можуть використовуватись ще 2 додаткові лінії зв’язку із сигналами готовності передавача і готовності приймача, що прискорює процес організації взаємодії між пристроями. Використання гальванічних розв’язок захищає електронні вузли комп’ютера та ПП від впливу завад високої потужності або від нештатного попадання у лінії зв’язку напруги силових мережевих ліній або інший сигналів.
Інтерфейс реалізовується на тих самих ВІС контролерів RS232C. Основною відмінністю є мікросхеми перетворення рівнів сигналів використовуються мікросхеми CL(для передавання)->ТТЛ(для приймання).
Лекція 3.2.Основні характеристики, склад і призначення ліній зв'язку, особливості обміну інформацією і виконання основних операцій інтерфейсів MIL-1553B, клавіатури.
Інтерфейс MIL-1553B (МПК)
МПК – послідовний мультиплексорний канал. Цей інтерфейс призначений для побудови завадостійких периферійних підсистем які можуть функціонувати в середовищах з високою інтенсивністю завад. Це магістральний, послідовний, напів-дуплексний асинхронний інтерфейс. Інтерфейс передбачає взаємодію контролера (К), який є складовою частиною комп’ютера та до 31 периферійного пристрою, які в даному інтерфейсі називаються кінцевими пристроями (КП). Пристрої під’єднуються до магістралі короткими відведеннями через імпульсні трансформатори. Магістраль реалізована через скрутку провідників, які поміщуються в екрані. Структура з’єднання пристроїв показана на рис.1. (наводиться рисунок)
Магістраль з обох сторін узгоджується резисторами Ry величиною 75 Ом, усі пристрої гальванічно розв’язані через імпульсні трансформатори та захисні резистори R3 величиною 56 Ом. Магістраль з обох сторін підєднується одним провідником до сигнальної землі і до екрану. На магістралі використовуються імпульсні сигнали із фазо-маніпульованим кодуванням яке названо Манчестер2. Особливості цього кодування є те, що посередині такту логічна одиниця та логічний нуль кодуються взаємо-протилежними перемиканням сигналу, це показано на рис.2., де на рис.2.а показано кодування логічної одиниці, а на рис.2.б логічного нуля. (t-тривалість одного такту, u-розмах сигналу).
а) б)
Рис.2.
Величина сигналу Uc для передавача має бути в межах 3-10В. А для приймача в межах 1-10В. Тривалість такту Т 1мксек, відповідно швидкість обміну даними в установленому режимі складає 1 Мбіт/сек. Взаємодія між пристроями реалізується окремими словами, які можуть бути 3 типів:
- Інформаційне слово (ІС).
- Командне слово (КС).
- Слова відповіді (ВС).
Всі слова тривалістю 20 тактів і мають 3 базових поля:
- Поле синхронізації для синхросигналів 3 такти.
- Змістова частина в 16 тактів.
- Поле контролю тривалістю 1 такт.
Слова відрізняються змістовою частиною. Змістова частина показана на рис.3 (наводиться рисунок). В інформаційному слові ІНФ- інформація(16т). В командному це АДР-код адреси(5), ЗЧ-код запису/читання(1), КРЖ – код режиму(5), ПДА – під-ардеса(), РЖ – режим (3). В слові відповіді ІСТ - інформація про стан пристрою.
Слова об’єднуються у повідомлення і можуть бути паузи між окремими словами. Ці паузи трьох типів Т1, Т2, Т3. Т1,Т2 – в межах 2мксек, Т3 – 2 і більше мксек. Чотири типи повідомлень:
1. К->КП:КІ,ІС,…,ІС, Т1, КС, Т3
2. КП->К: КС, Т2, ВС, ІС, …, ІС, Т3
3. КП->КП: КС,КС,Т2,ВС, ІС,…,ІС, Т1,ВС,Т3
4. К->КП(Ж): КС, Т2, ВС, Т3
Контролер може передати управління магістраллю на короткий час одному з кінцевих пристроїв і тоді реалізоване повідомлення 3 типу, після цього управління магістраллю повертається контролеру. Стандарт встановлює вимоги щодо організації взаємодії між адаптером кінцевого пристрою і електронного вузлами кінцевого пристрою. Для практичної реалізації цього інтерфейсу випускаються мікросхеми контролерів, адаптерів а також імпульсних трансформаторів. Це полегшує побудову периферійних підсистем.
Лекція 3.3. Основні характеристики, склад і призначення ліній зв'язку, особливості обміну інформацією і виконання основних операцій інтерфейсу USB.
Інтерфейс USB (Universal Serial Bus).
Інтерфейс призначений для побудови периферійних підсистем середньої та високої продуктивності. Це послідовний, напів-дуплексний інтерфейс із складним багаторівневим ієрархічним способом з’єднання компонентів. Перша версія стандарту була подана в 1996 році і з цього часу цей інтерфейс стає перспективним периферійним інтерфейсом і знаходить широке застосування в комп’ютерах. Його перспективність обумовлена наступними чинниками:
1. Простота побудови високоефективних периферійних підсистем.
2. Можливість створення периферійних підсистем із великою кількістю пристроїв(до 127).
3. Можливість створення різних конфігурацій периферійних підсистем, в тому числі автоматичне конфігурування та ре-конфігурування при увімкненому живлені у периферійній системі.
4. Можливість обміну в реальному часі інтенсивними потоками аудіо та відео даними.
5. Простота кабельних з’єднань.
До недоліків можна віднести обмежену максимальну відстань між пристроями в межах 5 метрів.
Інтерфейс передбачає взаємодію двох складових частин:
1. Host комп’ютер
2. Периферійна підсистема.
В периферійній підсистемі розрізняють такі типи пристроїв:
1. Функція.
2. HUB.
3. Комбінований функція-hub.
Периферійна система будується за ієрархічним принципом подібна до багатоярусної піраміди у вершині якої є host-контролер. Host-контролер є складовою частиною комп'ютера на якого покладаються функції організації взаємодії із ядром комп’ютера а також управління периферійною підсистемою.
HUB має порти введення/виведення двох типів. Порт верхнього рівня, через який забезпечується взаємодія із верхнім рівнем периферійної підсистеми і порти нижнього рівня через які забезпечується взаємодія із пристроями даного рівня периферійної системи або із HUB’ами наступного рівня периферійної системи. Максимальна кількість рівнів у периферійній системі 5. В структурі периферійної підсистеми після host-контролера включається кореневий HUB, верхній порт якого з’єднується із host-контролером а нижні рівні використовуються для створення периферійної підсистеми. У HUB’і найчастіше є 2, 4 порти нижнього рівня або рідше 8 портів. Кількість їх не є стандартизованою а визначається схемо-технічними рішеннями певної мікросхеми на якій реалізований HUB. Основні елементи структури периферійної USB системи:
1. USB host controller.
2. USB системне програмне забезпечення.
3. USB клієнтське програмне забезпечення.
4. Фізичні пристрої.
На теперішній час розроблено декілька версій цього інтерфейсу.
Перша версія USB 1.0 була представлена в січні 1995 року.
Технічні характеристики:
високошвидкісне з'єднання — 12 Мбіт/с
максимальна довжина кабеля для високошвидкісного з'єднання — 3 м
низькошвидкісне з'єднання — 1,5 Мбіт/с
максимальна довжина кабеля для низькошвидкісного з'єднання — 5 м
максимальна кількість пристроїв підімкнення (враховуючи )концентратори — 127
можливість підключення пристроїв з різними швидкостями обміну інформацією
напруга живлення для переферійних пристроїв — 5 В
максимальний струм споживання на один пристрій — 500 мA
Версія USB 1.1. Представлена у вересні 1998. Виправлені проблеми виявлені у версії 1.0, в основному пов'язані з концентраторами. Інтерфейс USB 1.1 декларує два режими:|
1)низькошвидкісний підканал (пропускна спроможність - 1,5 Мбіт/с), призначений для таких пристроїв, як миші і клавіатури;|устроїв|
2)високопродуктивний канал, що забезпечує максимальну пропускну спроможність 12 Мбіт/с, що може використовуватися для підключення зовнішніх накопичувачів або пристроїв обробки і передачі аудио- і відеоінформації.
Версія |устроїв||
USB 2.0. Версія представлена у квітні 2000 року. USB 2.0 відрізняється від USB 1.1 лише швидкістю передачі, яка зросла та незначними змінами в протоколі передачі даних для режиму Hi-speed (480 Мбіт/сек). Існує три швидкості роботи пристроїв USB 2.0:
Low-speed 10—1500 Кбіт/c (використовується для інтерактивних пристроїв: клавіатури, мишки, джойстики)
Full-speed 0,5—12 Мбіт/с (аудіо/відео пристрої)
Hi-speed 25—480 Мбіт/с (відео пристрої, пристрої зберігання інформації)
В дійсності ж хоча швидкість USB 2.0 і може досягати 480Мбит/с, пристрої типу жорстких дисків чи взагалі будь-які інші носії інформації ніколи не досягають її по шині USB, хоча і могли б. Це можна пояснити доволі просто, шина USB має доволі велику затримку між запитом на передачу інформацію і саме самою передачею даних («довгий ping»). Наприклад шина FireWire забезпечує максимальну швидкість у 400 Мбіт/с, тобто на 80Мбіт/с меньше чим у USB, дозволяє досягнути більшої швидкості обміну даними з носіями інформації.
Версія USB OTG. Технологія USB On-The-Go розширює специфікації USB 2.0 для легкого з'єднання між собою переферійних USB-пристроїв безпосередньо між собою без задіяння комп'ютера. Прикладом застосування цієї технології є можливість підключення фотоапарату напряму до друкарки. Цей стандарт виник через об'єктивну потребу надійного з'єднання особливо поширених USB-пристроїв без застосування комп'ютера, який в потрібний момент може і не виявитися під руками.
Бездротовий USB. Офіційна специфікація протоколу була анонсована в травні 2005 року. Дозволяє організовувати бездротовий зв'язок з високою швидкістю передачі даних до 480 Мбіт/с на відстані 3 метрів та до 110 Мбіт/с на відстані 10 метрів. Для безпровідного USB часом використовують абревіатуру WUSB. Розробник протоколу USB-IF віддає перевагу практиці іменування протокол офіційно Certified Wireless USB.
Версія USB 3.0. Протокол USB 3.0 знаходиться на стадії розробки і буде передавати сигнал за допомогою оптоволоконного кабелю USB 3.0 планується створити зворотно сумісним з USB 2.0 та USB 1.1
Створенням USB 3.0 займаються компанії: Intel, Microsoft, Hewlett-Packard, Texas Instruments, NEC и NXP Semiconductors.
Теоретична пікова пропускна здатність складає 4,8 Гбіт/с. Специфікація периферійної шини USB була розроблена лідерами комп'ютерної і телекомунікаційної промисловості (Compaq, DEC, IBM, Intel, Microsoft, NEC і Northern Telecom) для підключення комп'ютерної периферії поза корпусом ПК з автоматичною автоконфігурацією (Plug&Play). Перша версія стандарту з'явилася в 1996 р. Агресивна політика Intel по впровадженню цього інтерфейсу стимулює поступове зникнення таких низькошвидкісних інтерфейсів, як RS 232C, Access.bus і тому подібне Проте для високошвидкісних пристроїв строгішими вимогами до продуктивності (наприклад, доступ до видаленого накопичувача або передача оцифрованого відео) конкурентом USB є інтерфейс IEEE 1394.
Дата добавления: 2015-07-22; просмотров: 6165;