Полупогружные платформы
Самое современное поколение морских платформ – полупогружные. Это гигантские понтоны с вертикальными стабилизационными колоннами, остойчивость которых регулируют заполнением балластных емкостей в горизонтальных погружных поплавках. Осадка платформы в рабочем состоянии составляет 15–25 м. На рис. 6.13, а показан внешний вид первого поколения полупогружных платформ, на рис. 6.13, б – вид современной платформы с улучшенными навигационными характеристиками. Полупогружные платформы используют для бурения скважин при глубине вод, не доступной для стационарных и самоподъемных буровых оснований. В 2000 г. эта глубина составляла уже 1100 м, а двумя десятилетиями раньше – всего 500 м.
а б

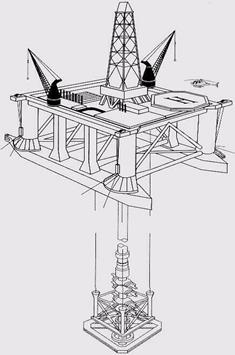
Рис.6.13. Конструкции полупогружных платформ:
а – первые конструкции;
б – современные с улучшенными навигационными характеристиками
Фиксация платформы над устьем скважины обеспечивается якорями и динамической системой стабилизации – несколькими двигателями, которые позволяют основанию маневрировать в зависимости от действия ветра, волн и течений, сохраняя нужное положение. Существует целая наука о якорях. Экспериментально установлено, что лучше всего якоря закрепляются в мягких грунтах, причем они глубже внедряются в грунт, если лапа может вращаться (рис.6.14). Прочной установке и стабилизации якоря способствует также его большая масса, до 30–50 т ( рис.6.15).

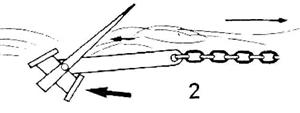

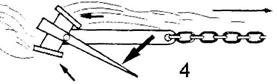
Рис. 6.14 Закрепление якоря шарнирной конструкции:
1 – открытие лапы; 2 – проникновение в грунт; 3 – захоронение лапы;
4 – стабилизация якоря в процессе протаскивания
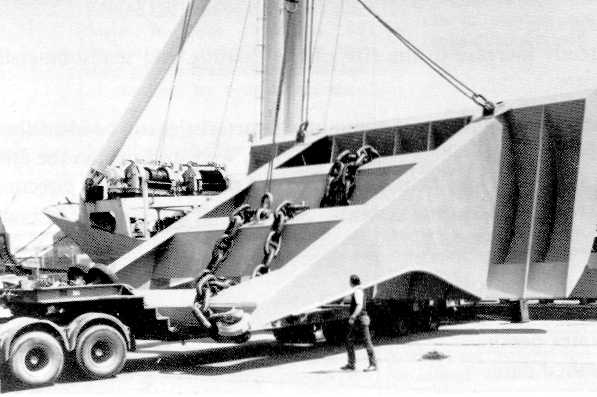
Рис. 6.15 Лопастной 50-тонный якорь для мягких пород


Рис. 6.16. Конструкции устьевого подводного эксплуатационного оборудования
фирмы Ветко (США) для одиночных скважин:
1 – фонтанная елка с гидравлическими задвижками; 2 – подводное устье скважины;
3 – направляющая конструкция; 4 – ориентирующий сердечник

Рис. 6.17. Донная плата для куста скважин:
1 – гнезда для свай; 2 – направляющие для устьев скважин; 3 – спутник вспомогательный; 4 – основание подводного манифольда; 5 –
Устьевое подводное оборудование может быть открытого или закрытого типа. Оборудование открытого типа устанавливают на устьях одиночных эксплуатационных скважин (рис. 6.16) или на донных платах для куста скважин (рис.6.17). На одиночных скважинах фонтанную елку монтируют на колонне обсадных труб. Донная плата для куста скважин требует дополнительного крепления ко дну с помощью свай.
а б


Рис. 6.19. Бурение с полупогружной платформы:
а – фиксация полупогружной платформы с помощью натяжных опор;
б – система обвязки трубопроводами при последовательном бурении скважин
Полупогружную платформу при бурении иногда крепят ко дну натяжными опорами (рис. 6.19, а). В этом случае обеспечивается хорошая фиксация платформы над точкой бурения. Одиночные скважины и кусты скважин, закрепленные на донных платах, обвязывают единой системой трубопроводов (рис. 6.19, б). Действующая система сбора продукции на морском промысле в Мексиканском заливе показана на рис. 6.20.


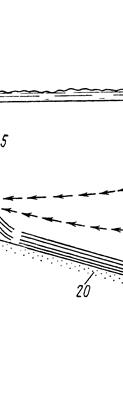
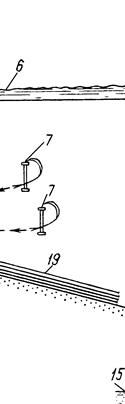
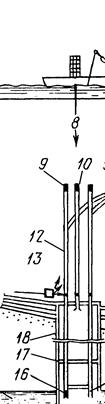

Рис. 6.20. Схема подводного заканчивания скважин:
1 – панель дистанционного управления; 2 –манифольд; 3 – замерное эксплуатационное оборудование; 4 – стояк 275мм; 5 – эксплуа-тационная платформа; 6 – поверхность моря; 7 – скважины; 8 – возможный вертикальный вход в скважину; 9 – насосно-компрессор-ные трубы; 10 – затрубное пространство; 11 – задвижки; 12 – подводное оборудование устья скважины для .компрессорной эксплуа-тации; 13 –манифольд гидравлической линии для управляющих задвижек; 14 –пробка; 15 – продуктивный интервал; 16 – установочный патрубок; 17 – пакер; 18 – обсадная колонна; 19 – выкидные линии; 20 – дно океана; 21 – заглубленный трубопровод до берега или до центральной платформы; 22 – гидравлические линии для управляющих задвижек
На глубине до 60 м подводное оборудование монтируют водолазы. Если глубины большие, применяют специальные подводные роботы-манипуляторы. Разработано несколько конструкций миниатюрных подводных лодок (рис. 6.21) с экипажем от трех до 10 человек. Водолазы могут выходить из лодки на глубине до 300 м, а эффективное время пребывания водолазов под водой при использовании подлодок увеличивается.

Рис. 6.21. Подводная лодка «Бивер» производства США с манипуляторами
для подводных работ на нефтепромыслах

Рис. 6.22. Глубоководный дистанционно управляемый манипулятор (Канада)
Для управления устьевым оборудованием и манифольдными камерами применяют гидравлические или электрогидравлические системы, которые включают дистанционно управляемые отсекающие клапаны. Управление каждой задвижкой осуществляется либо по отдельным линиям, идущим с обслуживающего центра, либо через единый распределительный блок. Широко используются манипуляторы (рис. 6.22), которые двигаются по специальным направляющим в установленном на дне моря базовом основании. Контроль и управление работой манипулятора производят с помощью подводного телевидения. Конструкции манипуляторов рассчитаны на глубины до 1100 м.
Дата добавления: 2015-06-27; просмотров: 2896;