Общие сведения об РТС
РТС - радиотехнические системы.
Определение: РТС - совокупность устройств, предназначенных для формирования, изучения, приема и обработки сигналов - переносчиков информации.
1.1 Классификация РТС
1. РТС извлечения информации.
Отправитель отсутствует. Информация закладывается в сигнал при его отражении от целей. Это информация о дальности до цели, во времени запаздывания отраженного сигнала по отношению к излученному.
 - длина волны, облучающей цель,
- длина волны, облучающей цель,  - радиальная скорость.
- радиальная скорость.
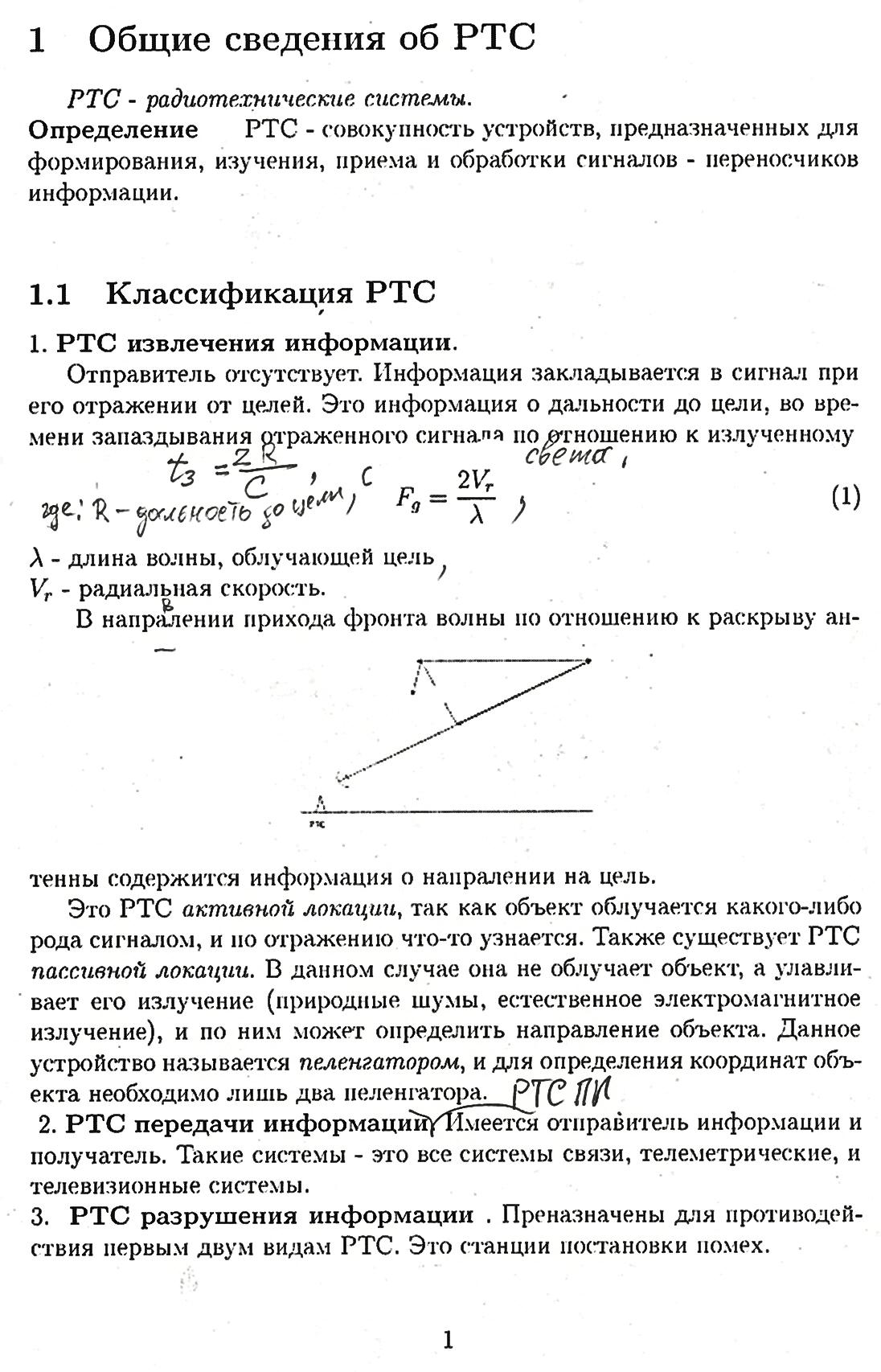
В направлении прихода фронта волны по отношению к разрыву антенны содержится информация о направлении на цель.
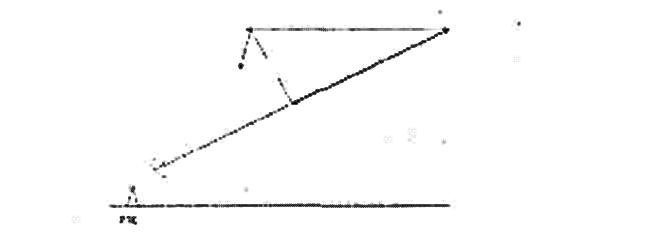
Рисунок.
Это РТС активной локации, так как объект облучается какого-либо рода сигналом, и по отражению что-то узнается. Также существует РТС пассивной локации, В данном случае она не облучает объект, а улавливает его излучение (природные шумы, естественное электромагнитное излучение), и по ним может определить направление объекта. Данное устройство называется пеленгатором, и для определения координат объекта необходимо лишь два пеленгатора.
2. РТС передачи информации у РТС ПИ. Имеется отправитель информации и получатель. Такие системы - это все системы связи, телеметрические, и телевизионные системы.
3. РТС разрушения информации. Предназначены для противодействия первым двум видам РТС. Это станции постановки помех.
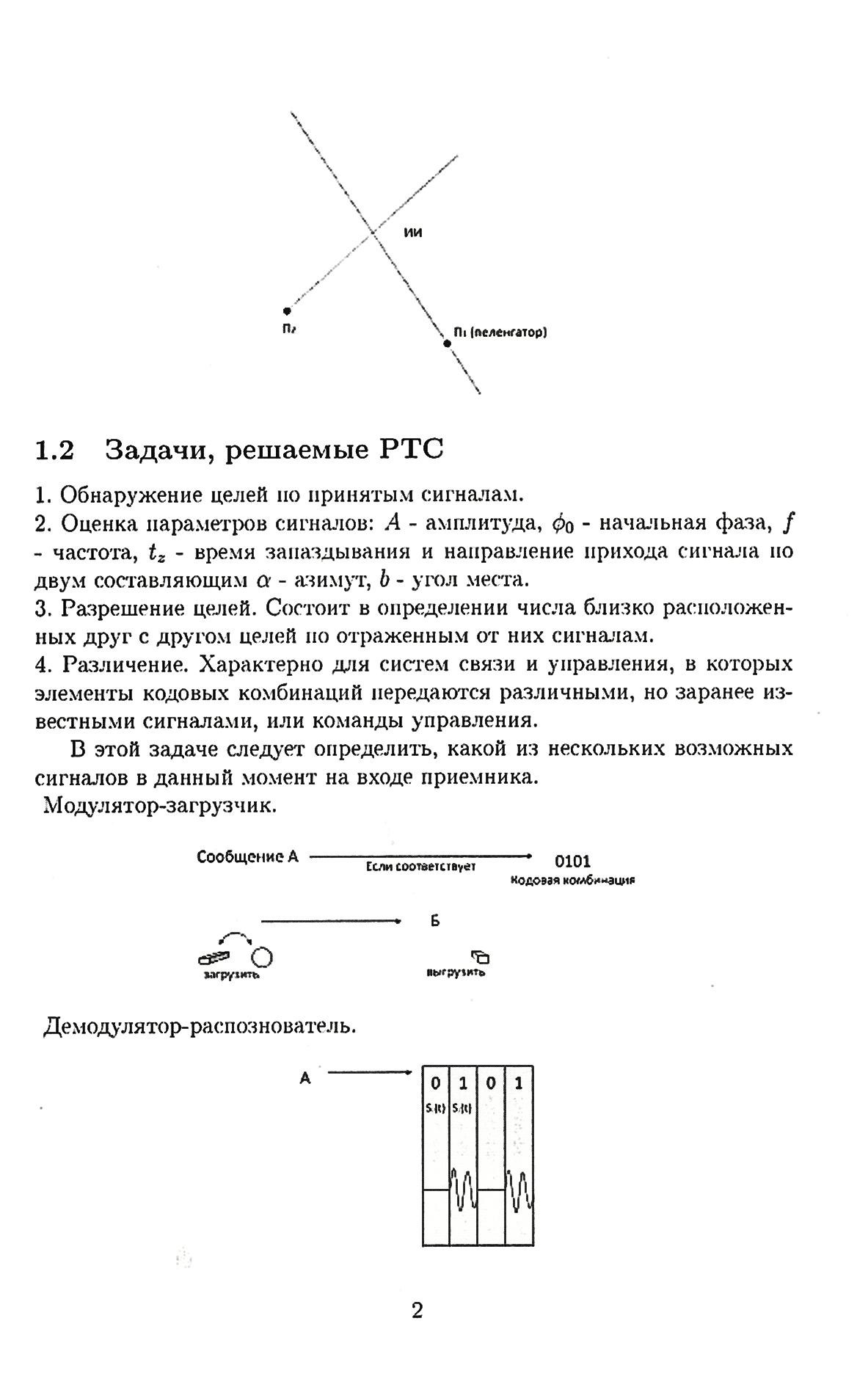
Рисунок.
1.2 Задачи, решаемые РТС
1. Обнаружение целей по принятым сигналам.
2. Оценка параметров сигналов: А - амплитуда,  - начальная фаза, f- частота, tВ- время запаздывания и направление прихода сигнала но двум составляющим α - азимут, β - угол места.
- начальная фаза, f- частота, tВ- время запаздывания и направление прихода сигнала но двум составляющим α - азимут, β - угол места.
3. Разрешение полей. Состоит в определении числа близко расположенных друг с другом целей по отраженным от них сигналам.
4. Различение. Характерно для систем связи и управления, в которых элементы кодовых комбинаций передаются различными, но заранее известными сигналами, иле командами управления.
В этой задаче следует определить, какой из нескольких возможных сигналов в данный момент на входе приемника. Модулятор-загрузчик.
5. Задача распознавания целей по виду принимаемых сигналов. Нужно определить вид цели, от которой он отразился. При отражении закладывается информация о конфигурации.
6. Задача автоматического сопровождения целей по дальности, скорости и угловым координатам с целью получения оценки траектории движения целей.
7. Задача третичной обработки. Обработка сигналов и/или информации, получаемой от нескольких РЛС, связных навиганых навигационных позиции в едином центре.. Задачи 1-4 относят к первичной обработке, 5-6 к вторичной.
2. Понятие обработки сигнала
Определение:
Обработка - последовательность математических операций над входной реализацией (напряжение, снимаемое с выхода УПЧ приемника), предназначенная для решения данной задачи.
Для каждой из перечисленных задач обработка своя. Алгоритм обработки зависит от моделей, принимаемых полезных сигналов, и моделей помеховых сигналов. Одну и ту же задачу можно решить несколькими отличающимися друг от друга алгоритмами обработки. Качество решения любой задачи определяется термином эффективность алгоритма обработки. Из-за наличия помех - случайных параметров принимаемых полезных сигналов, и конечного интервала обработки решение любой из перечисленных задач не может быть выполнено абсолютно точно, так как помехи - всегда случайный процесс.
Если параметры сигнала - всегда случайный процесс, то решение любой задачи определяется терминами теории вероятности.
Среди нескольких алгоритмов обработки, предназначенных для решения данной задачи - найдется один максимально эффективный. Он оптимален - то есть является наилучшим, среди всех возможных, предназначенных для решения данной задачи. Понятие оптимальности возможно только при заданном критерии качества.
Критерий должен удовлетворять двум условиям:
1. Содержать численные параметры, определяющие эффективность решения задачи.
2. Быть математически продуктивным, то есть позволять выполнить математический синтез оптимального алгоритма.
Последовательность операций при синтезе оптимальных алгоритмов обработки.
Рисунок.
Модель полезного сигнала определяет алгоритм обработки. Последовательность операций при синтезе алгоритмов обработки. Прежде чем к чему-то приступать, нужно задать модели полезных, помеховых сигналов и вид их взаимодействия. При отсутствии какого-либо из данных вычисления бесполезны.
Сама модель:
1. Задание решаемой задачи.
2. Выбор или задание критерия качества.
3. Задание модели распространения полезных сигналов, в которую входят: канал "передающая антенна - цель", вид цели (точечная или распределенная), канал "цель-приемная антенна".
4. Выбор или задание моделей излучаемого сигнала.
5. На основе третьего и четвертого определения модели принимаемого сигналаканалы распространения:
- гидросфера
- ионосфера
- тело человека или животного
- атмосфера
- космическое пространство
6. Задание моделей помех и их взаимодействия с принимаемым полезным сигналом.
Типы взаимодействия:
Аддитивная помеха. Складывается с сигналом.
Мультипликативная помеха. Умножается на сигнал.
Аддитивно-мультипликативная.
Аддитивная помеха - это собственный шум приемника и ряд внешних помех. Он складывается с полезным сигналом. При распространении сигнала в атмосферной среде амплитуда случайно изменяется - это мультипликативная помеха.
7. Составление уравнений, связывающих между собой критерий качества и модель входной реализации, с учетом ограничений, накладываемых на техническую реализацию алгоритма.
8. Решение этих уравнений - получение оптимального алгоритма, то есть набор математических операций, которые необходимо выполнить над принятой реализацией.
9. По полученному алгоритму определяется структурная схема, где для каждой операции выбирается техническое устройство, ее реализующее, и определяется эффективность работы оптимального алгоритма, а так же стоимость его реализации.
10. Если эффективность оказывается больше, чем требуется - то идут
на упрощение оптимального алгоритма с целью снижения стоимости реализации путем отбрасывания каких-то несущественных операций и/или приближенного выполнения существенных операций - поиск подоптимального алгоритма (квазиоптимального). Определяют эффективность подоптимального алгоритма, и сравнивают с заданной. Если она оказывается больше, чем заданная - то продолжают упрощение до того момента, когда эффективность упрощенного алгоритма не сравняется с заданной.
2.1 Информация, сообщение, сигнал
Определение Информация - это совокупность сведений о событиях или явлениях, которые получает потребитель (это сведения, которые являются объектом хранения, передачи и преобразования).
Определение Сообщение - это совокупность сведений о состоянии какой-либо материальной системы, а сама материальная система, вместе с устройством регистрации ее состояния называется источником сообщения.
Сообщения бывают дискретные и непрерывные.
Дискретными называются такие сообщения, которые предполагают передачу конечного числа символов или знаков. Например, буквенно-цифровой текст.
Непрерывными (аналоговыми) называются такие сообщения, в которых подлежащая передаче совокупность сведений является непрерывной функцией. Например, это речь, музыка, изображения. Не всякое сообщение несет информацию.
Передача информации происходит с помощью материального носителя. Передача информации происходит с помощью физических процессов - электромагнитные и акустические поля.
Физический процесс, несущий передаваемое сообщение, называется сигналом.
Сигнал - это изменение состояния материального объекта, произведенное по заранее определенным правилам (коду).
Сигналы формируются путем изменения тех или иных параметров физического процесса по закону передаваемого сообщения. Этот процесс называется модуляцией.
Сообщения бывают:
1. Динамическими функциями времени. В этом случае сигнал - функция времени.
2. Статичные. Это текст, картинки.
Сигнал всегда является функцией времени, даже если сообщение статично. Если сообщение передается непрерывно, то сигнал аналоговый (непрерывный). Дискретные сообщения передаются дискретными сигналами.
3. ЭРТ ПИ (передачи информации)
3.1 Структурная схема системы передачи дискретных сообщений
Функциональная схема системы передачи дискретныхсообщений
Арrd, - передающая антенна.
Арrт - приемная антенна.
С-выхода DKK - первичный код.
С - выхода DМ - вторичный код.
IР - источник внешней помехи.
Виды модуляции сигналов - переносчиков информации
Пример:
ДОСКА - кодовая комбинация.
Модулятор - голосовой аппарат.
GSPI- легкие.
PRD- рот (вместе с APRD)
PRM- слуховой аппарат.
На DKIпоступает набор импульсов, который он превращает в образ доски.
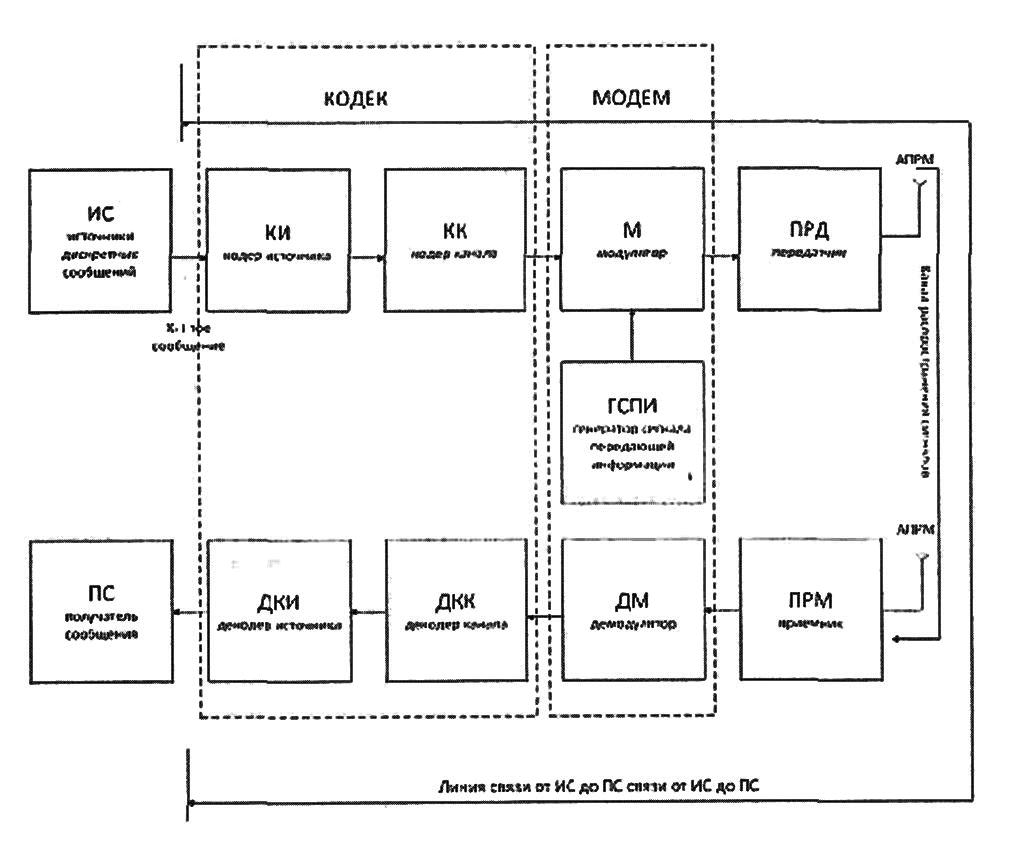
Рисунок: Структурная схема системы передачи дискретных сообщений.
Доски бывают разные, следовательно, кодирование неоднозначно. Доска при искажении помехами может превратиться в ТОСКА. Для предотвращения этого и нужны КК и DКК. Чтобы предотвратить такое искажение - вводятся КК и DКК.
Каждый элемент первичного кода дополнительно кодируется: ДОСКА: Дмитрий, Ольга, Сергей, Ксения, Алексей.
Другой способ представляет собой неоднократное повторение кодовой комбинации.
Введение избыточности любым путем уменьшает скорость передачи.
Источник дискретных сообщений считается заданным, если заданывсе возможные сообщения х1,х2,....,хnкоторые могут возникать на еговыходе и заданы соответствующие этим сообщениям их вероятности появления на выходе IS: Р(х1),Р(х2), ...,Р(хn).
Ми - объем алфавита источника сообщений - то есть число различных сообщений, которые могут получиться на выходе источника.




Рисунок: Источник сообщения.
Вероятности всех цифр и букв давно подсчитаны. КIпредназначен для однозначного кодирования сообщений, снимаемых с выходаIS, то есть каждому сообщению он должен присвоить свою кодовую комбинацию, которая должна отличаться от кодовых комбинаций, присвоенных всем другим сообщениям.
С выхода КIснимается первичный код.
КК предназначен для увеличения помехоустойчивости при передаче информации на этапе кодирования путем введения избыточности в кодовые комбинации первичного кода.
Например, методом их -кратного повторения или дополнительного кодирования каждого элемента первичного кода. Введение избыточности приведет к снижению скорости передачи информации, так как на вторичное кодирование требуется больше времени, чем на первичное.
С выхода КК снимается вторичный или помехоустойчивый код.
М предназначен для формирования сигналов, передающих элементы кодовых комбинаций от отправителя сообщения к получателю. Для этого в модуляторе производится изменение какого-либо параметра сигнала, снимаемого с GSPIпо закону, определяемому элементами кодовой комбинации, поступающей на управляющий вход модулятора. С выхода М снимаются сигналы.
PRDпредназначен для переноса сигналов, снимаемых с выхода М навысокую частоту и их усиления.
Рисунок: Кодер источника.
APRDпреобразует сигналы, поступающие с выхода PRDв электромагнитное поле, которое излучается в пространство.
Аprmпринимает электромагнитные поля, снимаемые из окружающего пространства, и преобразует их в напряжения, снимаемые с ее выхода.
Таким образом, на выходе приемной антенны снимаются все сигналы, которые попали по спектру в ее полосу пропускания.
PRMпредназначен для осуществления частотной фильтрации принятых антенной сигналов, то есть он должен пропустить на свой выход только те сигналы, которые совпадают по спектру с его полосой пропускания. Приемник также должен усилить принимаемые сигналы до величины, необходимой для работы последующих устройств (в данном случае DМ).
С выхода приемника снимаются как полезные сигналы, переносящие элементы кодовых комбинаций, так и помехи, как внешние, совпадающие по спектру с полезным сигналом, так и собственный шум приемника.
DМ преобразует сигналы, снимаемые с выхода PRMв соответствующие им элементы кодовой комбинации.
DМ выполняет демодуляцию.
DКК предназначен для помехоустойчивого декодирования вторичного кода с обнаружением или исправлением ошибок.
С выхода DKKснимается первичный код.
DКIпреобразует первичный код в передаваемое сообщение, которая выдается получателю.
4 Виды модуляции сигналов переносчиков информации
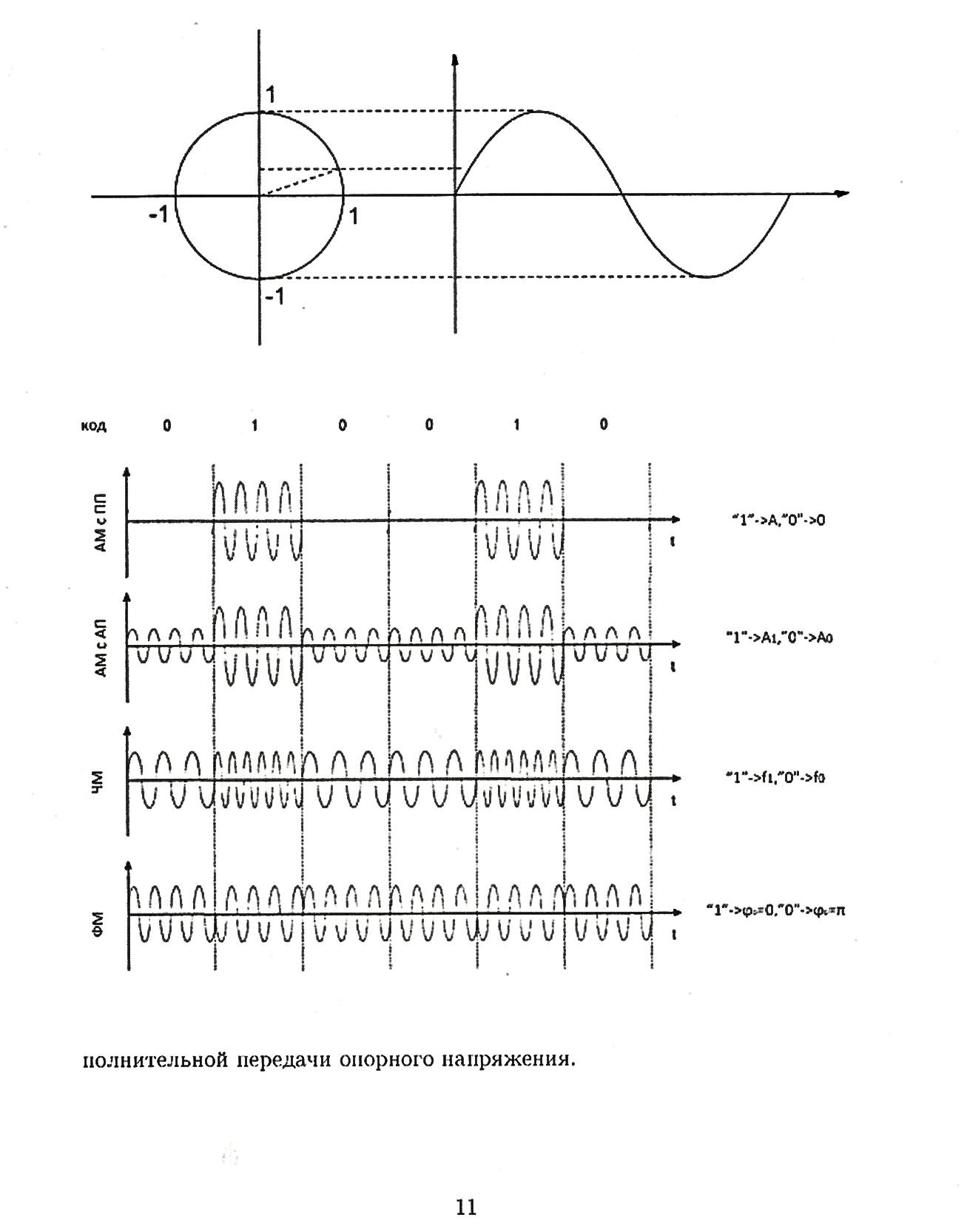
Модуляцией называется изменение одного или нескольких параметров сигнала, снимаемого с выхода GSPIпо закону передаваемого сообщения. В цифровых системах связи при кодировании обычно применяется бинарный код, имеющий символы "0" и "1". Поэтому модулируемый параметр сигнала должен принимать только два значения: одно соответствует нулю, другое соответствуетединице. В этом случае процесс модуляции называется манипуляцией.
Рассмотрим виды манипуляции синусоидального колебания, формируемого GSPI.

Это сигнал формируемый GSPI.
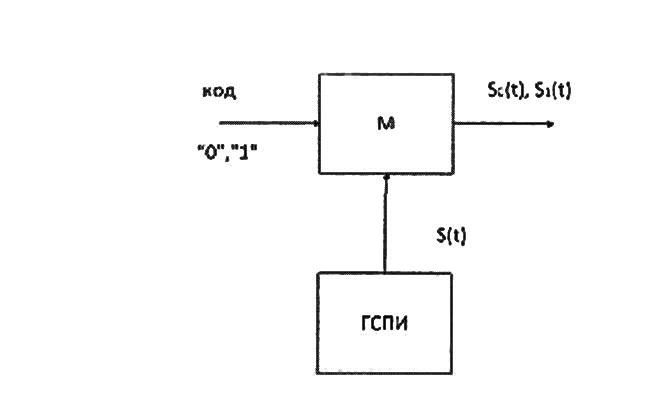
Рисунок: Передача сигнала.
Наибольшей помехоустойчивостью обладают сигналы с фазовой манипуляцией, с разностью фаз между ними равной π. Такие сигналы называются ортогональными.
Меньшей помехоустойчивостью обладают сигналы с частотной модуляцией (FМ). Такие сигналы называются ортоганальными. 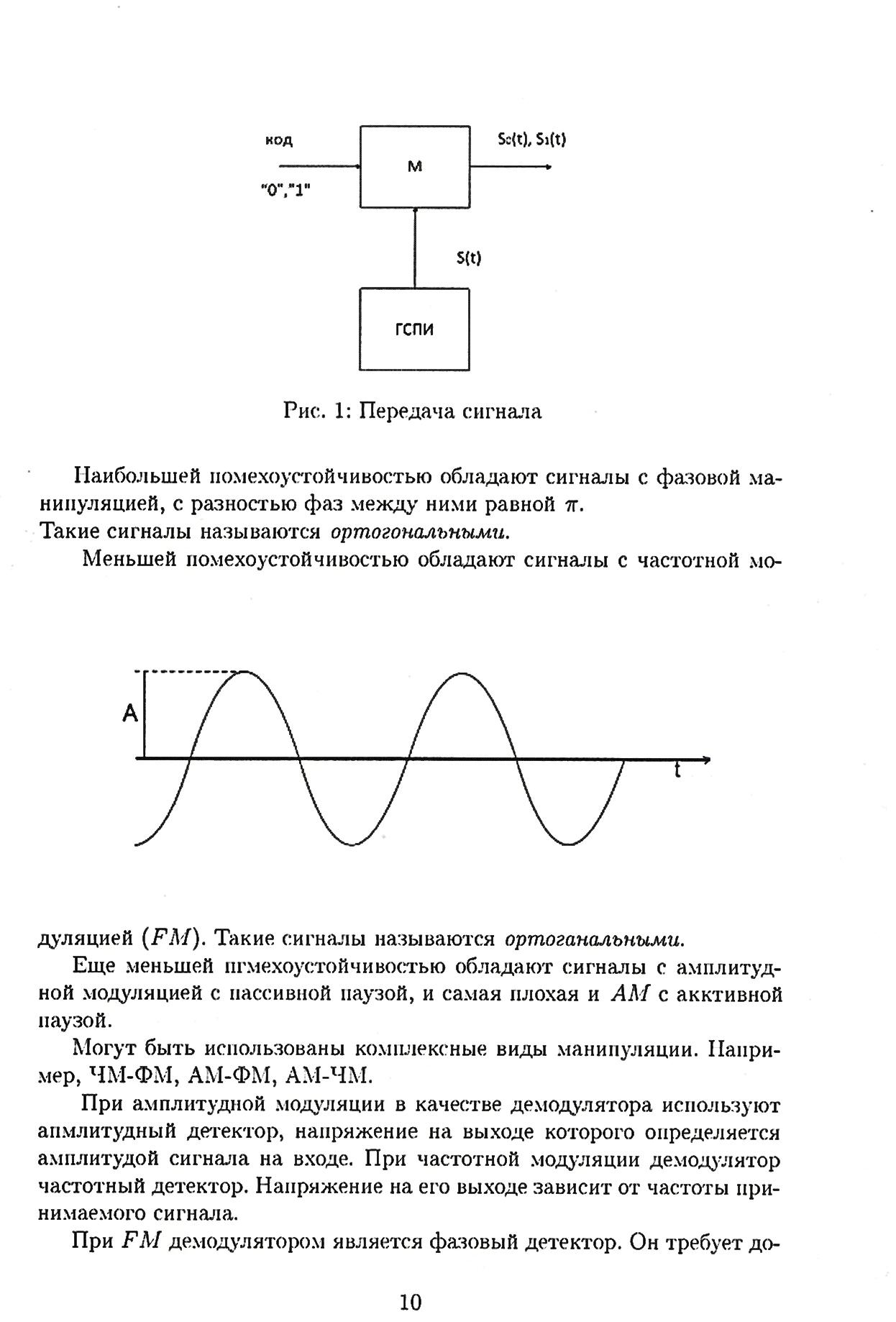
Рисунок.
Еще меньшей помехоустойчивостью обладают сигналы с амплитудной модуляцией с пассивной паузой, и самая плохая и АМ с активной паузой.
Могут быть использованы комплексные виды манипуляции. Например, ЧМ-ФМ, АМ-ФМ, АМ-ЧМ.
При амплитудной модуляции в качестве демодулятора используют амплитудный детектор, напряжение на выходе которого определяется амплитудой сигнала на входе. При частотной модуляции демодулятор частотный детектор. Напряжение на его выходе зависит от частоты принимаемого сигнала.
При FМ демодулятором является фазовый детектор. Он требует дополнительной передачи опорного напряжения.
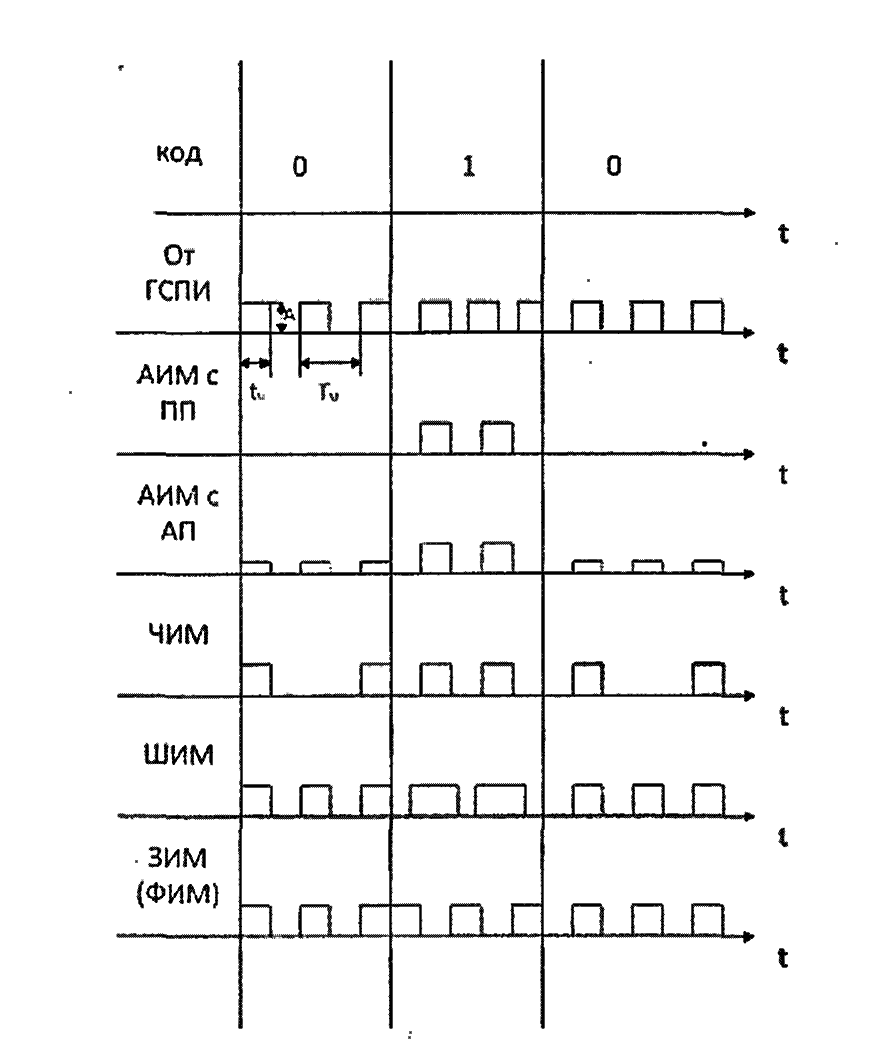
4.1 Виды манипуляции последовательности видеоимпульсов
АИМ с ПП - амплитудно-импульсная модуляция с пассивной паузой.
АИМ с АП - амплитудно-импульсная модуляция с активной паузой. ЧИМ - частотно-импульсная модуляция. ШИМ - широтно-импульсная модуляция.
ВИМ - временно-импульсная модуляция. Она же ФИМ - фазо-импульснаямодуляция.
5 Основные параметры кода
1. Основание кода - m. Определяется числом отличающихся друг от
друга символов в алфавите кода (кодера). При т = 2 код называется
бинарным, и наиболее часто используемые символы его представления:
"0", "1". Положительные свойства:
1. Простота сопряжения с ЭВМ.
2. Полное использование возможностей передающих устройств.
3. Высокая помехоустойчивость.
При т >2 код называется многоосновной.
При т = 1 код называется числоимпулъсным.
2. Длина кодовой комбинации п. Еще это называется разрядность или
длина кодового слова. Это количество символов в кодовой комбинации.
Кодовая комбинация соответствует передачи отдельного дискретного сообщения. Код называется равномерным, если все кодовые комбинации равны по длине, и неравномерным, если кодовые комбинации имеют разную длину.
3. Число кодовых комбинаций N.

Для однозначного кодирования число различных кодовых комбинаций должно быть больше или равно объему алфавита источника дискретных сообщений. Мп<= N. Код называется полным, (простым или примитивным), если N = Мп. При выполнении  < Мп < тпкод называется первичным.
< Мп < тпкод называется первичным.
Существуют разрешенные и запрещенные комбинации при первичном коде. Например, когда нам нужно закодировать 17 сообщений в двоичном коде - нам нужно последовательность длины 5. Такой код является первичным, но там будет 15 запрещенных символов.
В первичном коде всегда для кодирования используется больше половины возможных кодовых комбинаций. 4. Кодовое расстояние dопределяется количеством разрядов, в которых одна кодовая комбинация данного кода отличается от другой.
0101 0101
1001 1101
d = 2 d =1
Минимальное кодовое расстояние равно минимальному числу несовпадающих по значению одноименных разрядов при попарном сравнении всех комбинаций кодов.
В первичных кодах всегда  .
.
5. Избыточность кода. К наличию избыточности приводит то, что среди возможного числа кодовых комбинаций N для передачи сообщений используются только  кодовых комбинаций, которые называются разрешенными, а
кодовых комбинаций, которые называются разрешенными, а  для передачи сообщений не используются. Они называются запрещенными. В зависимости от этого соотношения рассматривается такое понятие как избыточность.
для передачи сообщений не используются. Они называются запрещенными. В зависимости от этого соотношения рассматривается такое понятие как избыточность.
6 Первичные стандартные коды
Они формируются кодером источника.
1. Код Морзе. Код неравномерный. Создан в 1837 году. Длина кодовойкомбинации определяется вероятностью появления букв латинского алфавита и чем больше эта вероятность, тем короче длина кодовой комбинации. В этом случае сокращается средняя длина кодовых комбинаций, что увеличивает скорость передачи сообщений.
Кодовые комбинации состоят из единиц и нулей, которые используются в двух сочетаниях; как одиночные - "1", "0", или как тройные "111", "000". Единица используется как точка. 0 служит для отделения одного знака от другого. 111 используется как тире. 000 отделяют одну кодовую комбинацию от другой, положительные свойства: высокая помехоустойчивость, возможность приема на слух, отрицательные свойства: сверхизбыточный код, неравномерный, при ручной работе на ключе длительность элементарной кодовой посылки т -переменная, значит, зависит от человека.
2. Код Бодо, Был создан в 1874. т = 2; п = 5; N = 25 = 32.
3. Код Муррея. Отличие от кода Бодо только в том, что для наиболее часто встречающихся букв и знаков используются кодовые комбинации с минимальным числом единиц, что снижает нагрузку на аппаратуру и увеличивает надежность ее работы,
4. МТК-2. 1932 год. т = 2;п =5;N= 32;. В нем есть латинский алфавит, цифры и русский алфавит. Введен третий регистр.
5. СКПД №5. Стандартный код передачи данных номер 5. m— 2;п = 7; N = 128. Дополнительно к предыдущим кодам введены новые кодовые комбинации, позволяющие осуществлять сообщение с ЭВМ,
7 Принципы помехоустойчивого кодирования
Помехоустойчивое кодирование является одним из этапов повышения вероятности правильного приема передаваемых сообщений. Общие положения. При действии помех может быть неправильный прием (демодуляция), Вместо передаваемой единицы в кодовой комбинации ошибочно будем считать, что передавался "0", и наоборот, вместо передаваемого нуля ошибочно на выходе демодулятора снимается единица. Такая одиночная ошибка в приеме единицы или нуля приводит к ошибочному приему всей кодовой комбинации. Любая ошибка носит вероятностный характер, то есть она может появиться только с определенной вероятностью, которая зависит от отношения сигнал - шум. Чем больше отношение сигнал - шум, тем меньше вероятность ошибки при передачи первичных кодов.
Двоичный симметричный канал связи. Р(0/0) - вероятность появления нуля на выходе ДМ при условии, что на выходе кодера источника снимался элемент кодовой комбинации 0. Такая вероятность называется условной. Условие: появление нуля на выходе кодера источника. Таким же образом можно рассматривать Р= (1/1). Это вероятности правильного приема нуля и единицы. 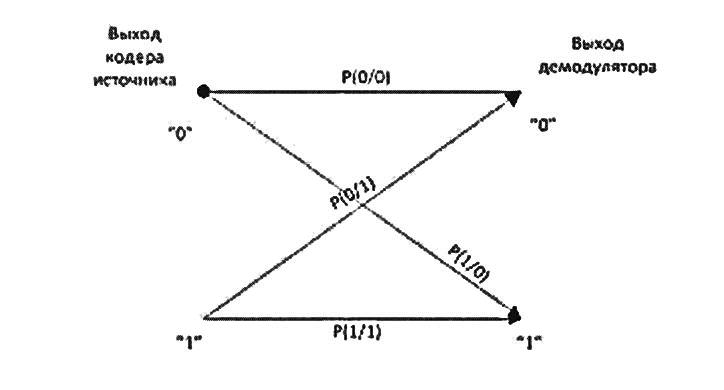
Рисунок.
Р(1/0);Р(0/1) - вероятности перепутывания.
Р(0/0) = Р(1/1);Р(1/0) = Р(0/1);Р(0/0) + Р(1/0) = 1;Р(1/1) + Р(0/1) = 1; Методы помехоустойчивого кодирования направлены на увеличениевероятности приема нулей и единиц.
8 Влияние минимального кодового расстояния на кратность обнаружения и исправления ошибки
Помехоустойчивое кодирование применяется при двух методах декодирования:
1. С обнаружением ошибки.
2. С исправлением ошибки.
Кратность ошибки - число позиций (разрядов), в которых при демодуляции произошли ошибки. Вместо нуля с выхода ДМ снята единица, или вместо единицы с выходя ДМ снимается 0.
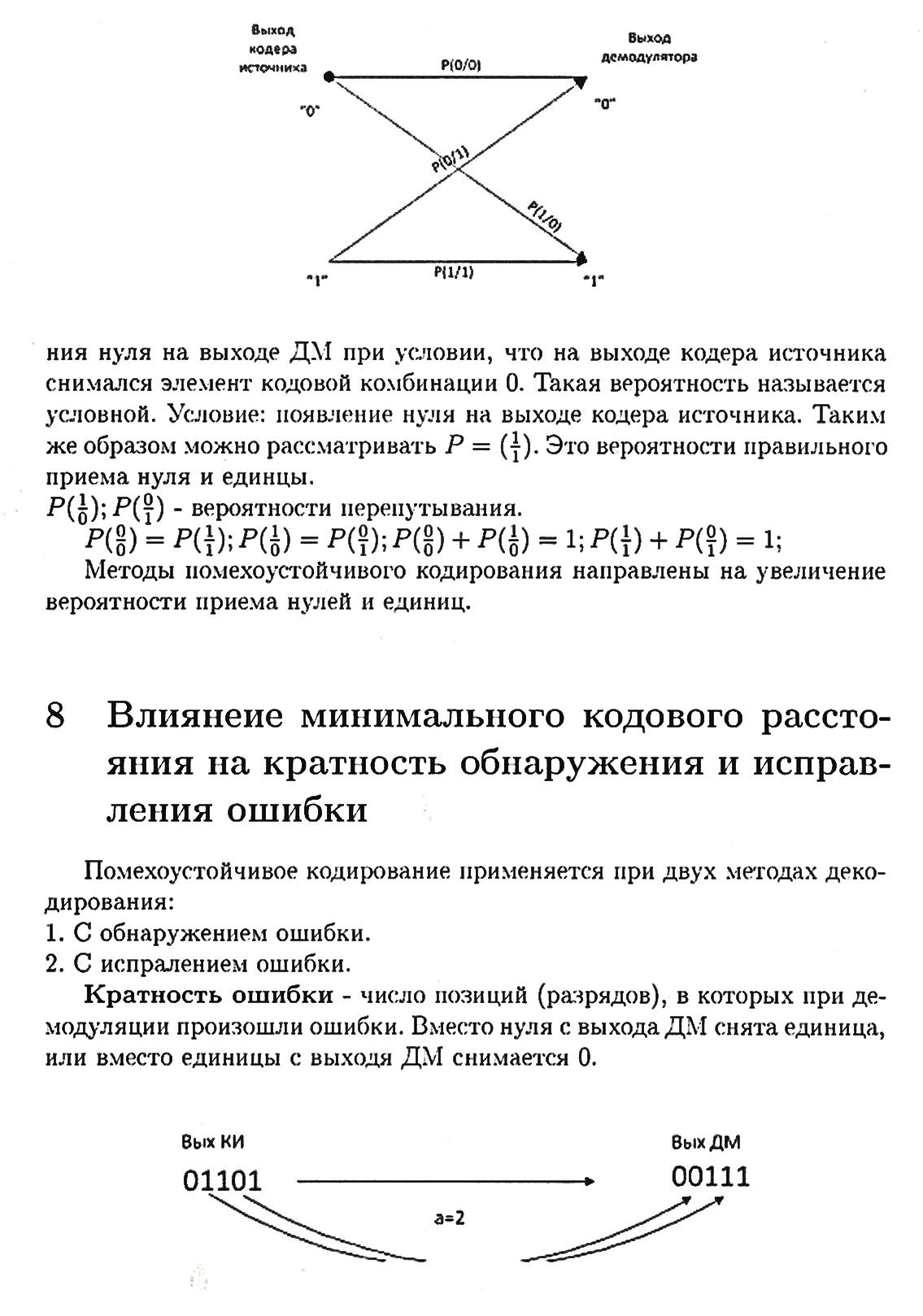
Рисунок.
8.1 Принцип обнаружения ошибки кратностью а.
Нужно передать два сообщения: КК формирует вторичный код.
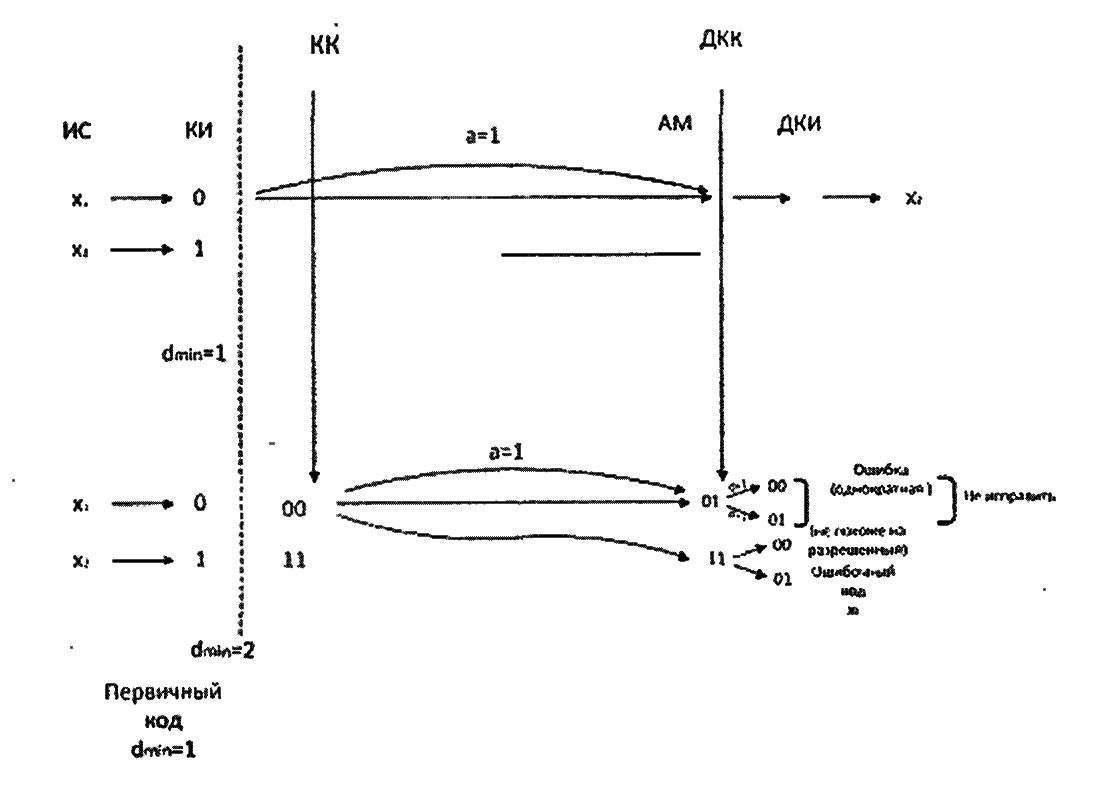
Рисунок.
Если  = 2, то мы можем обнаружить однократную ошибку. Двухкратная ошибка в этом случае не может быть обнаружена. Следовательно, нужно увеличить .
= 2, то мы можем обнаружить однократную ошибку. Двухкратная ошибка в этом случае не может быть обнаружена. Следовательно, нужно увеличить .
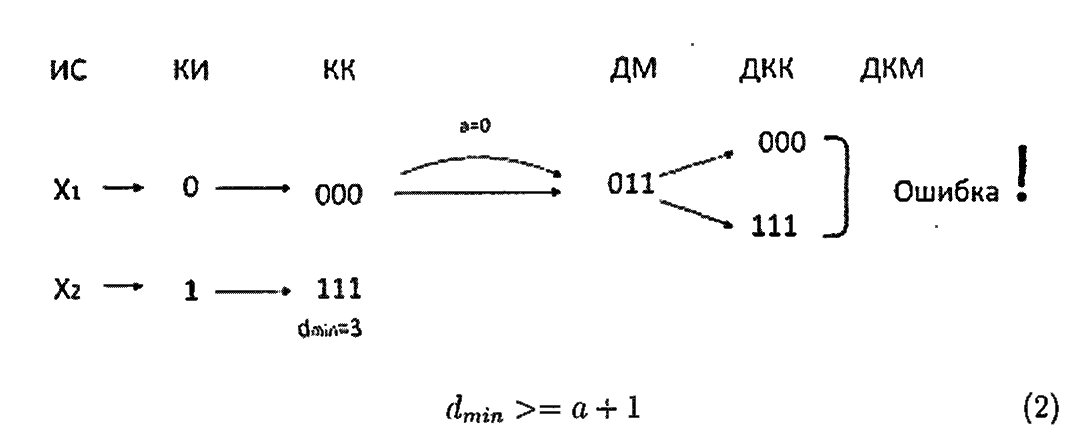
Рисунок.
Если >= а + 1. - мы можем обнаружить ошибку кратностью а. Если эти вероятности существенно разные, то исправление ошибкивозможно без повторного запроса.
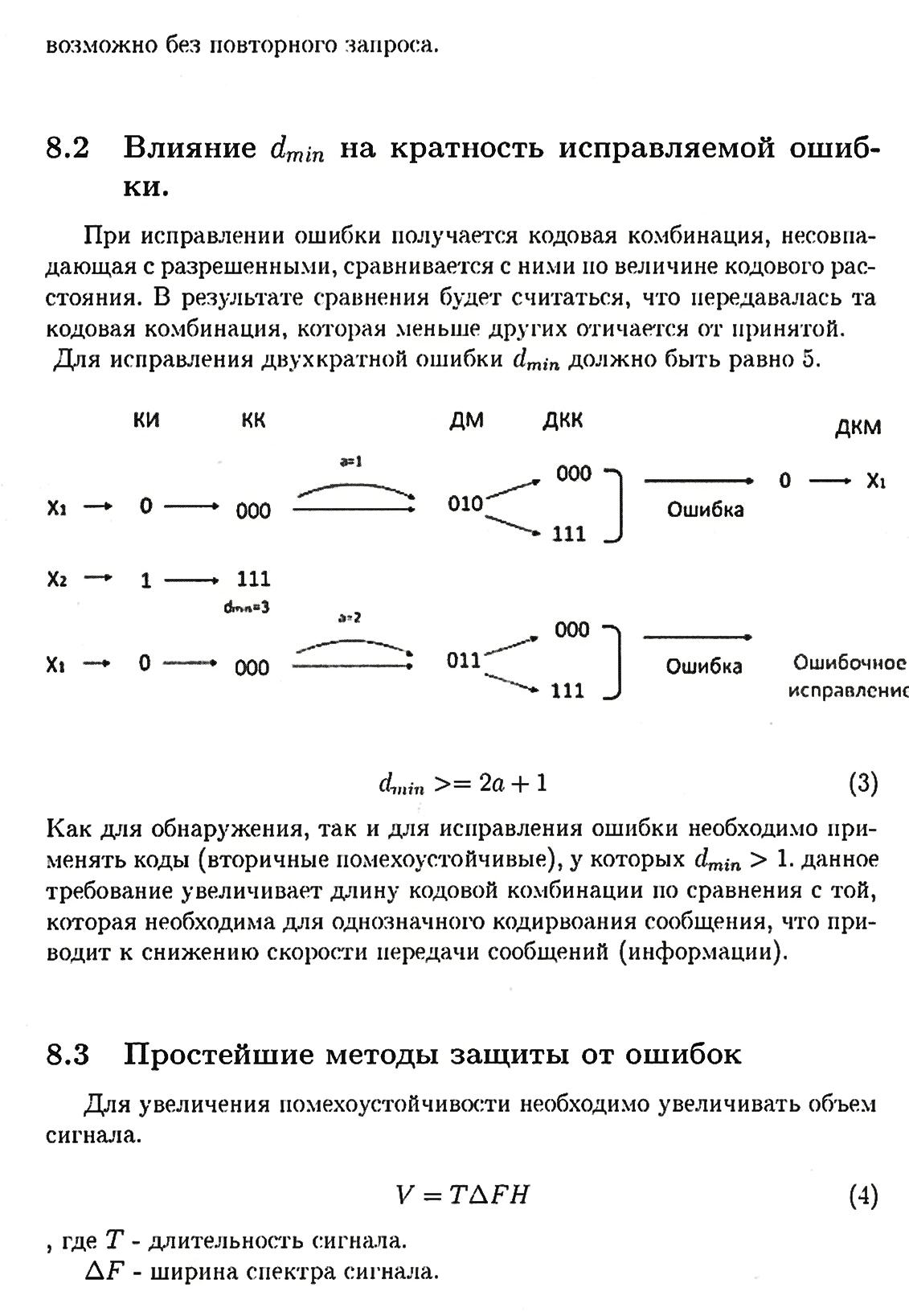
8.2 Влияние на кратность исправляемой ошибки.
При исправлении ошибки получается кодовая комбинация, несовпадающая с разрешенными, сравнивается с ними по величине кодового расстояния. В результате сравнения будет считаться, что передавалась та кодовая комбинация,которая меньше других отличается от принятой.
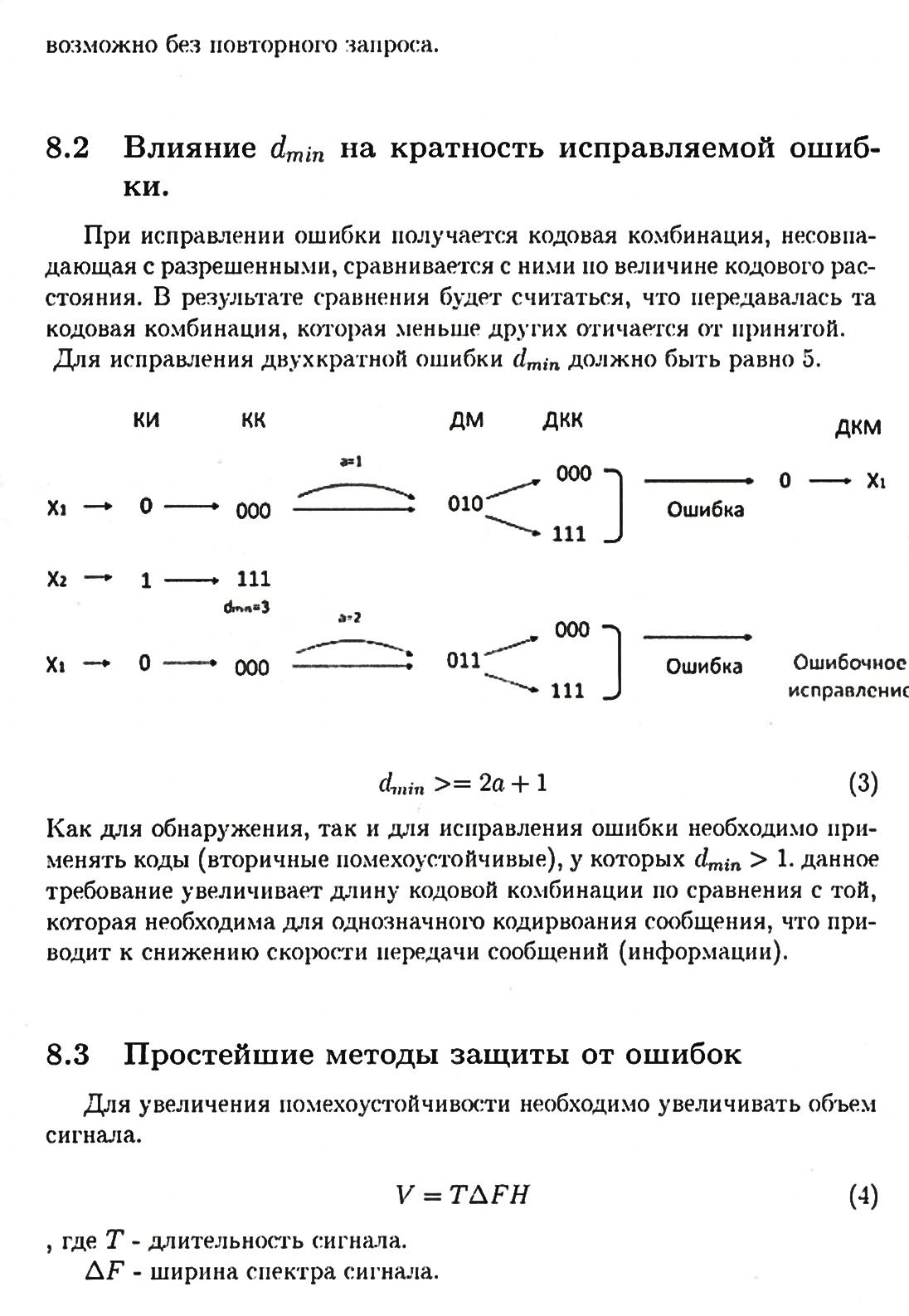
Рисунок.
Для исправления двухкратной ошибки должно быть равно 5.
>=2а+1
Как для обнаружения, так и для исправления ошибки необходимо применять коды (вторичные помехоустойчивые), у которых >1. данное требование увеличивает длину кодовой комбинации по сравнения с той, которая необходима для однозначного кодирования сообщения, что приводит к снижению скорости передачи сообщений (информации).
8.3 Простейшие методы защиты от ошибок
Для увеличения помехоустойчивости необходимо увеличивать объем сигнала.
 ,
,
гдеТ- длительность сигнала. ∆F- ширина спектра сигнала.
 - отношения сигнал/шум.
- отношения сигнал/шум.
Рс- мощность сигнала.
Рт - мощность шума.
Мощность сигнала увеличивать нельзя.
Кроме увеличения объема сигнала, для увеличения помехоустойчивости применяется следующие методы на этапе кодирования информации:
1. Многократное повторение кодовой комбинации первичного кода.
2. Одновременная передача информации по нескольким каналам.
3. Корректирующие коды.
4. Комбинация первых трех вариантов.
8.4 Метод многократного повторения
Используется в двух вариантах:
1. Повторение кодовых комбинаций одна за другой.
2. Один элемент кодовой комбинации повторяется  раз.
раз.
Положительные свойства: Самый простой метод.
Отрицательные свойства:
Снижается скорость передачи в раз, а, следовательно, увеличивается задержка в получении сообщения.
8.5 Правила декодирования в двоичных симметричных каналах связи при использовании метода -кратного повторения кодовых комбинаций
В двоичных симметричных каналах связи Р(1/0) = P(0/1)-Для декодирования применяется метод накопления: решение принимается по большинству принятых одноименных элементов ( метод голосования по большинству или мажоритарный метод).
Для этого каждый должен передаваться не менее, чем трижды. При этом выбор значения элемента производится по двум одноименным значениям.

- минимальное кодовое расстояние первичного кода.
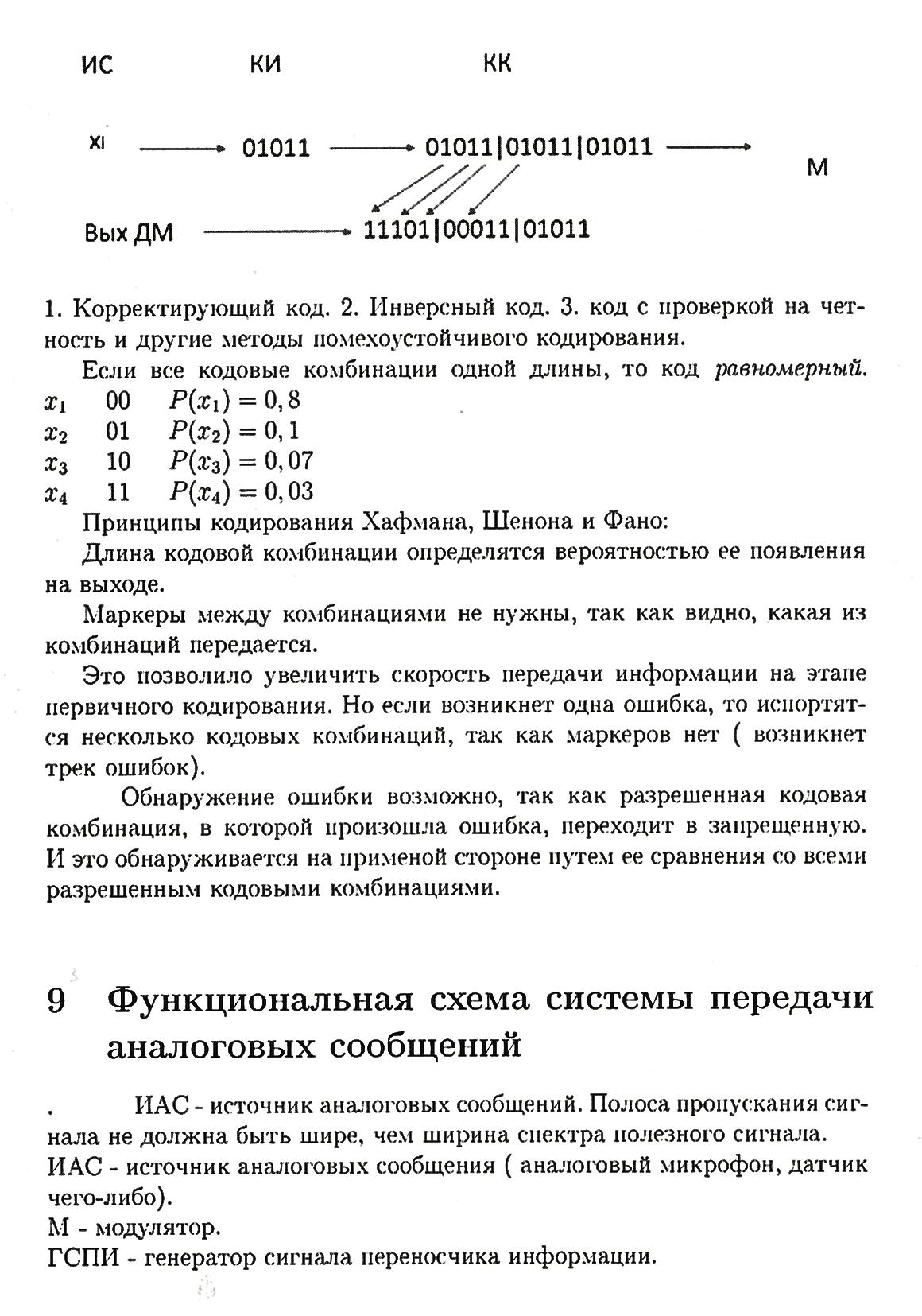
Рисунок.
Это самый простой метод. Кроме этого метода еще применяются:
1. Корректирующий код. 2. Инверсный код. 3. Код с проверкой на четность и другие методы помехоустойчивого кодирования.
Если все кодовые комбинации одной длины, то код равномерный.
Принципы кодирования Хафмана, Шенона и Фано:
Длина кодовой комбинации определятся вероятностью ее появления на выходе.
Маркеры между комбинациями не нужны, так как видно, какая из комбинаций передается.
Это позволило увеличить скорость передачи информации на этапе первичного кодирования. Но если возникнет одна ошибка, то испортятся несколько кодовых комбинаций, так как маркеров нет ( возникнет трек ошибок).
Обнаружение ошибки возможно, так как разрешенная кодовая комбинация, в которой произошла ошибка, переходит в запрещенную. И это обнаруживается на приёмной стороне путем ее сравнения со всеми разрешенным кодовыми комбинациями.
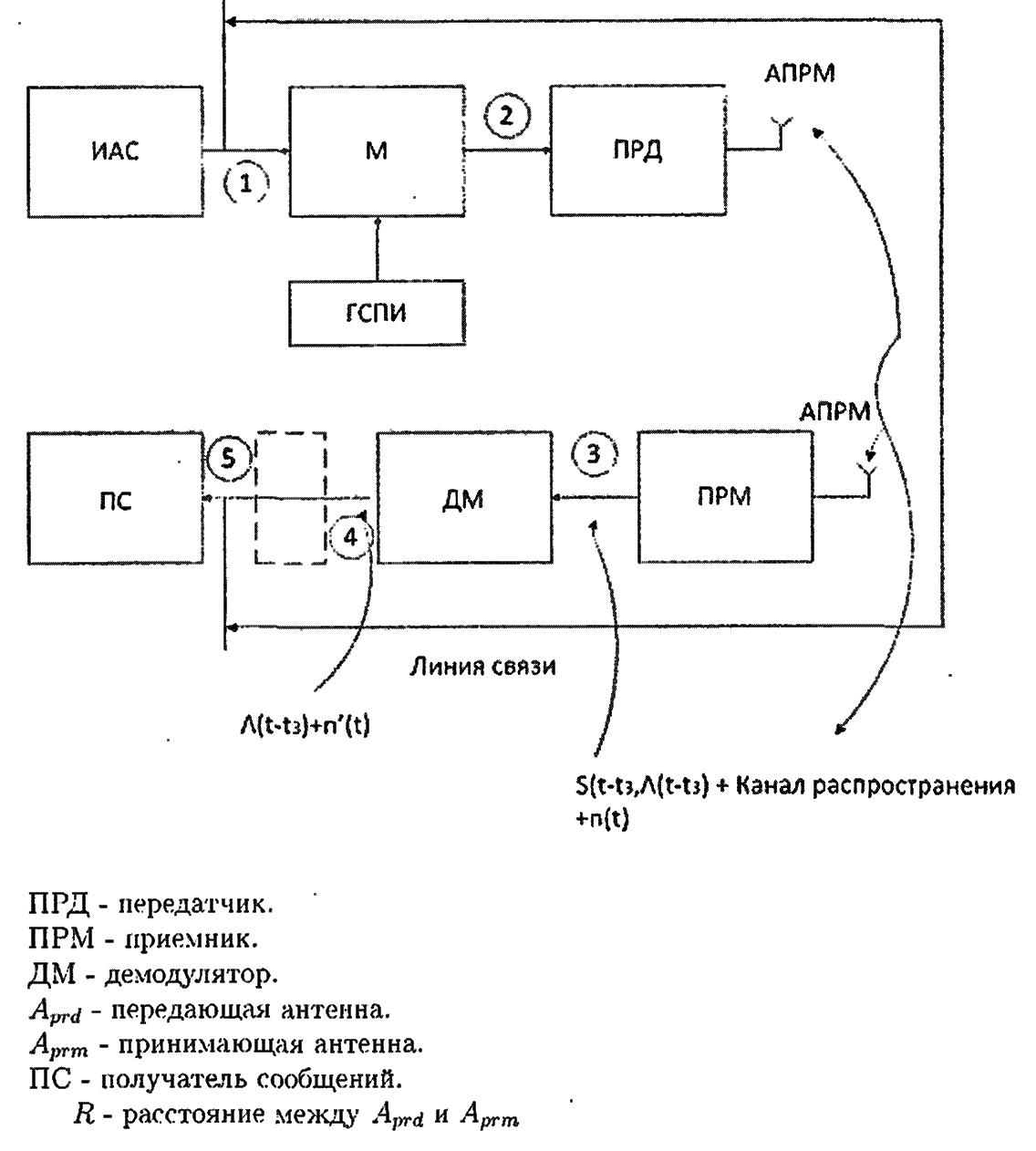
9 Функциональная схема системы передачи аналоговых сообщений
ИАС - источник аналоговых сообщений. Полоса пропускания сигнала не должна быть шире, чем ширина спектра полезного сигнала. ИАС - источник аналоговых сообщения ( аналоговый микрофон, датчик чего-либо).
М - модулятор.
ГСПИ - генератор сигнала переносчика информации.
|
Рисунок.
При сдвиге вправо или влево вычитается или прибавляется к аргументу.
 - время запаздывания.
- время запаздывания.
с - скорость света, если связь осуществляется посредством радиоволн. n(t) - шумовая составляющая, которая содержит собственный шум приемника и внешние помехи, принятые антенной и попадающие в полосу пропускания приемника, которая определяется шириной спектра полезного принимаемого сигнала.
 - энергетический спектр собственного шума приемника.
- энергетический спектр собственного шума приемника.
- спектральная плотность мощности собственного шума 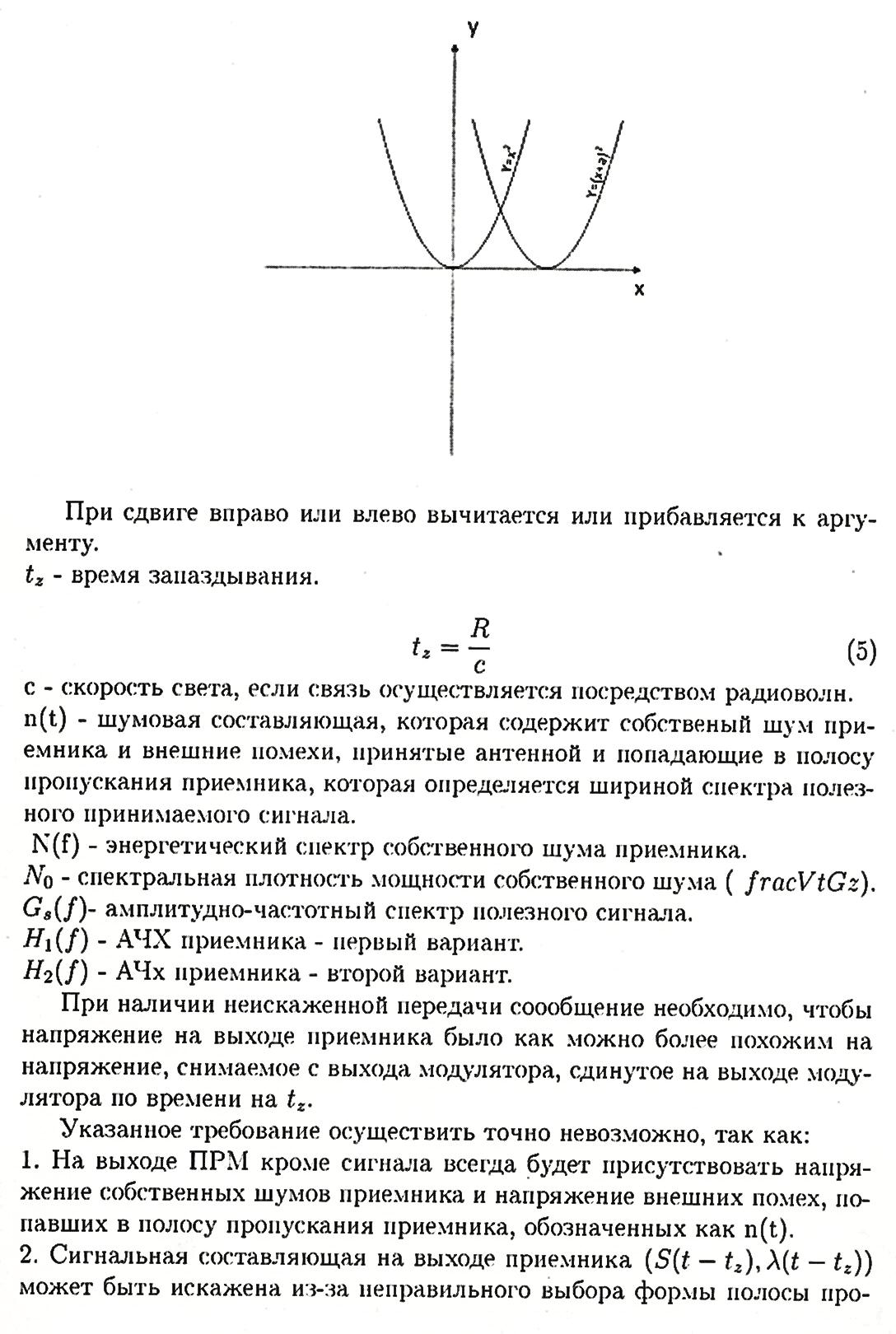
 - амплитудно-частотный спектр полезного сигнала.
- амплитудно-частотный спектр полезного сигнала.
 - АЧХ приемника - первый вариант.
- АЧХ приемника - первый вариант.
 - АЧX приемника - второй вариант.
- АЧX приемника - второй вариант.
При наличии неискаженной передачи сообщение необходимо, чтобы напряжение на выходе приемника было как можно более похожим на напряжение, снимаемое с выхода модулятора, сдвинутое на выходе модулятора по времени на .
Указанное требование осуществить точно невозможно, так как:
1. На выходе ПРМ кроме сигнала всегда будет присутствовать напряжение собственных шумов приемника и напряжение внешних помех, попавших в полосу пропускания приемника, обозначенных как n(t).
2. 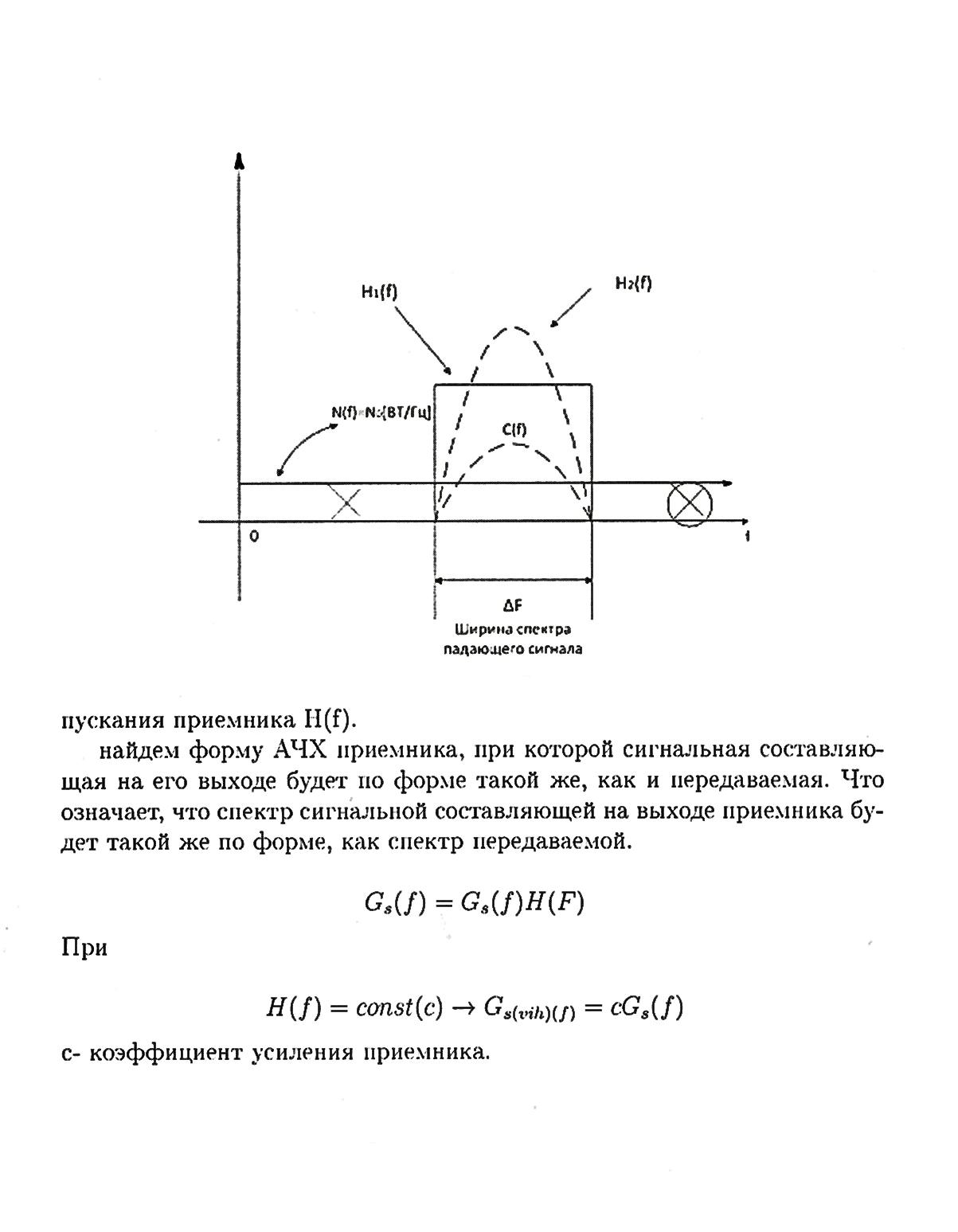
Сигнальная составляющая на выходе приемника  может быть искажена из-за неправильного выбора формы полосы пропускания приемника H(f).
может быть искажена из-за неправильного выбора формы полосы пропускания приемника H(f).
Найдем форму АЧХ приемника, при которой сигнальная составляющая на его выходе будет по форме такой же, как и передаваемая. Что означает, что спектр сигнальной составляющей на выходе приемника будет такой же по форме, как спектр передаваемой.

При
с- коэффициент усиления приемника.
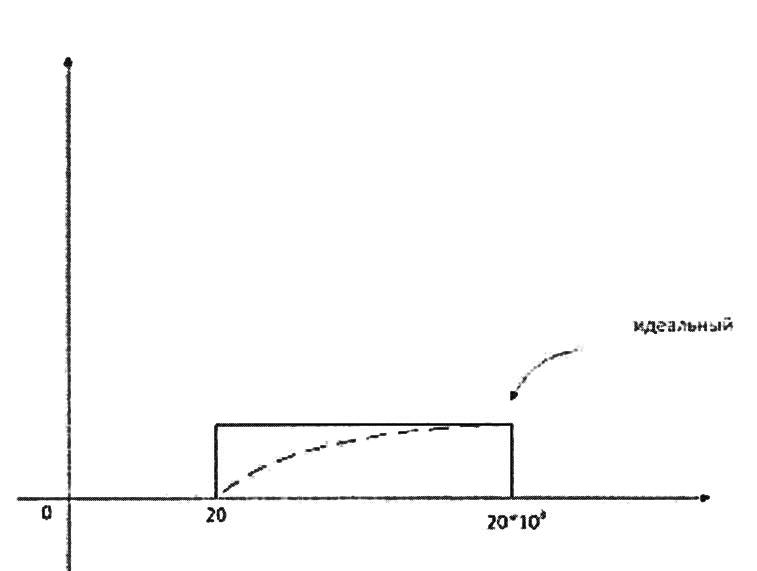
Полоса пропускания ПРМ при аналоговых видах модуляции должна иметь прямоугольную форму в переделах ширины спектра полезного сигнала
 - помеха п(t), прошедшая через демодулятор - искажает принятое сообщение
- помеха п(t), прошедшая через демодулятор - искажает принятое сообщение  .
.
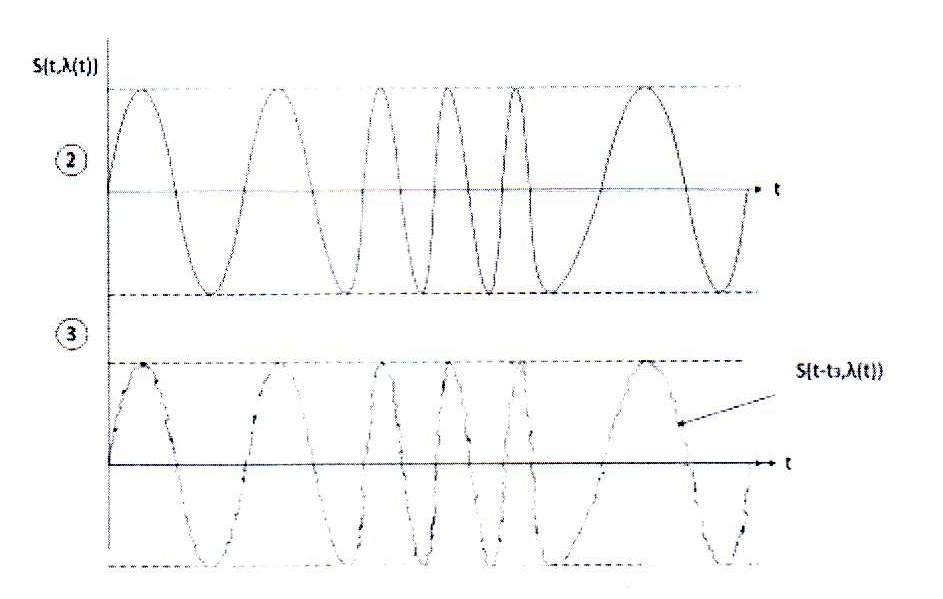
10. Эпюры напряжений в характерных точках схемы при аплитудной модуляции
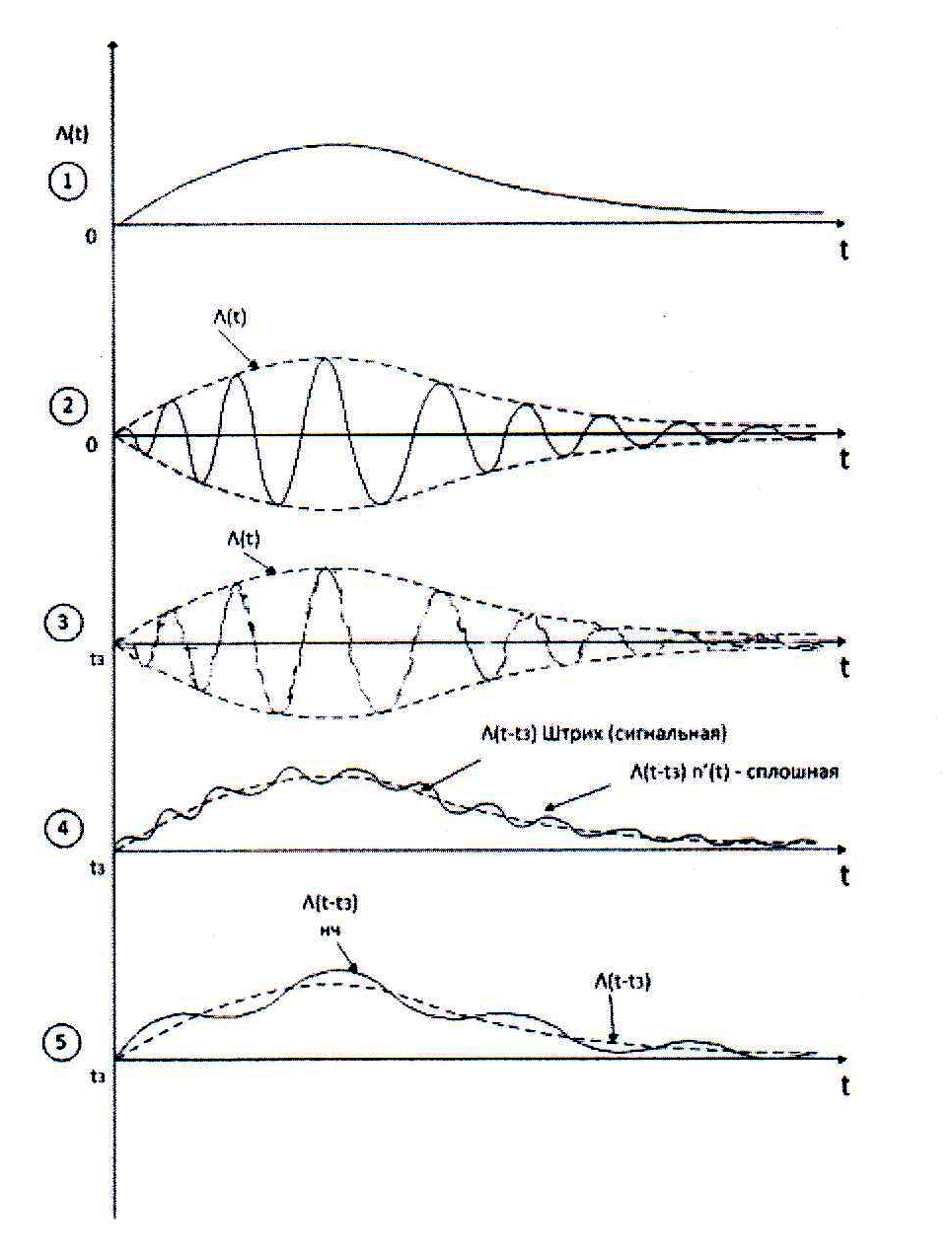
Рисунок.
Па 3-м эпюре пунктиром обозначена сигнальная составляющая на выходе приемника.
При амплитудной модуляции в качестве демодулятора используется амлитудный детектор, который выделяет огибающую напряжения, подаваемого на его вход.
Рисунок.
a2<a1
Как правило, заранее известны некоторые характеристики случайного процесса λ(t), который подлежит передаче. Среди них: максимально возможная скорость изменения данного процесса (напряжения на выходе НАС), что означает, что получателю сообщения заранее известен энергетический спектр процесса λ (t), верхняя граничная частота которого определяется максимально возможной скоростью изменения этого процесса.
Энергетический спектр передаваемого сообщения λ (t): fu– верхняя частота спектра - определяет максимально возможную скорость измнения процесса.
Рисунок.
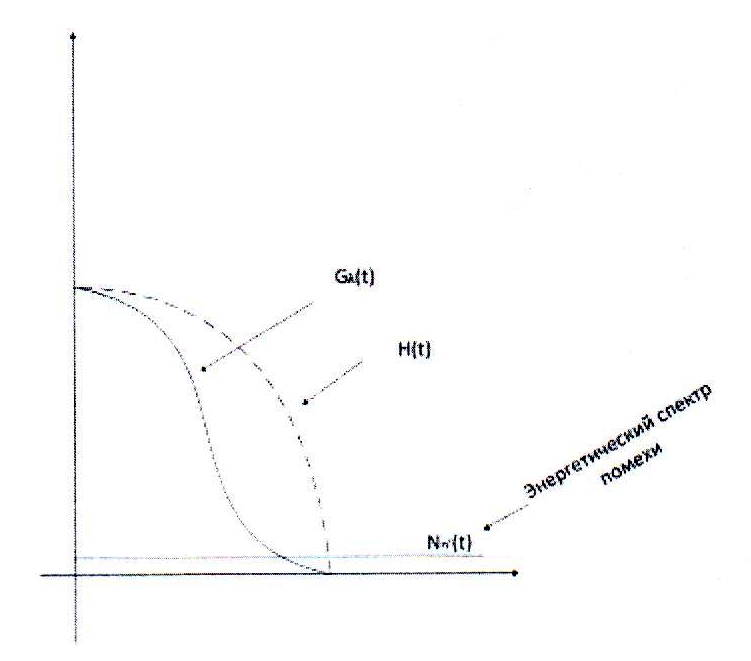
Рисунок.
Белый свет состоит из бесконечного количества волн, каждая из которых имеет свою частоту. Каждая временная функция имеет свой спектр.
Энергетический спектр помехи, который находится на частотах выше fu создает на выходе ДМ изменения напряжения более быстрые, чемвозможные изменения передаваемого сообщения λ (t).
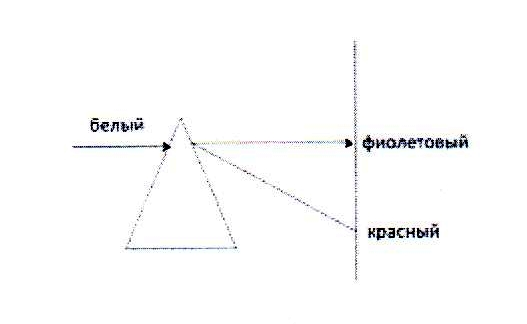
Рисунок.
Чтобы отфильтровать помеху, несовпадающую по частоте с энергетическим спектром λ(t), то есть убрать быстрые изменения напряжения на выходе ДМ, между ДМ и ПС обычно ставят низкочастотный фильтр, полоса пропускания которого определяется шириной энергетического спектр передаваемого сообщения ( на рисунке показано пунктиром). Низкочастотный фильтр сглаживает напряжение, снимаемое с выхода ДМ, то есть убирает его быстрое изменения, вызванные наличием полосовой составляющей n’(t), несовпадающие с энергетическим спектром Gλ (t) передаваемого сообщения.
10.1 Эпюры напряжений в характерных точках схемы при применении частотной модуляции
1,4,5 – то же самое.
При частотной модуляции ДМ является частотным детектором.
11. Моделисообщений
1) Непрерывная функция непрерывного аргумента.

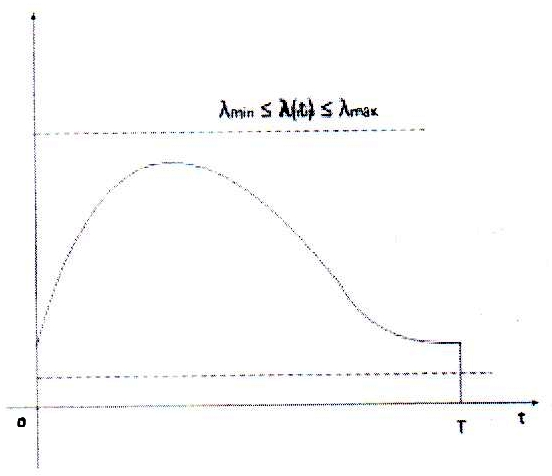
Рисунок.
Интервал возможных значений передаваемого сообщения.
λ (t) - случайный процесс.
Информация содержится в виде функции.
2) Дискретная функция непрерывного аргумента. L - число уровней квантования по амплитуде.
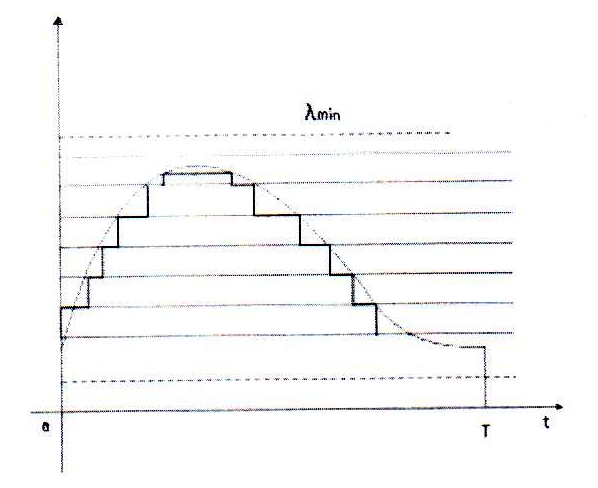
Рисунок.

Число возможных значений, которые может принимать функция λj(t’) 0<= t<= Т.
3) Непрерывная функция дискретного аргумента.
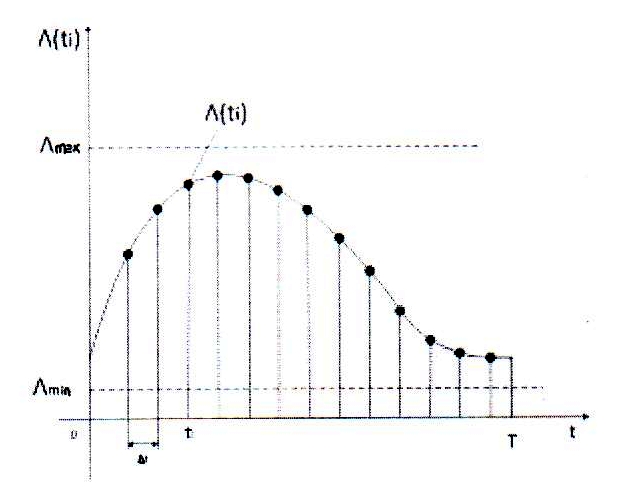
Рисунок.
4) Дискретнаяфункциядискретногоаргумента.
t принимает ряд дискретных сообщений λmin<= λ(ti)<= λmax
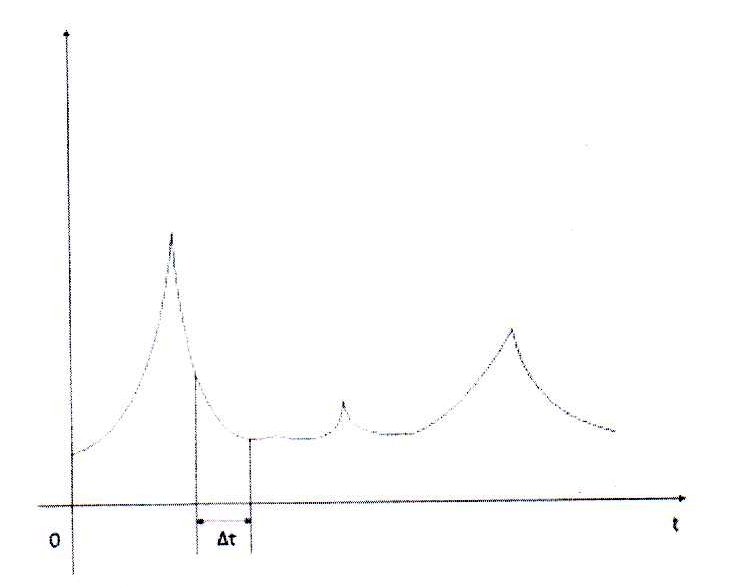
Рисунок.
12. Преобразование аналогового сообщения в дискретное (непрерывную функцию дискретного аргумента). Теорема Котельникова.
Теорема Котельникова определяет максимально возможный интервал квантования по времени непрерывного сообщения при котором это непрерывное сообщение может быть восстановлено точно по полученным его отсчетам λ(ti)где  и дает алгоритм такого восстановления.
и дает алгоритм такого восстановления.
12.1 Формулировка теоремы Котельникова
Непрерывная функция времени λ(t) со спектром, ограниченным полосой частот от 0 до fv полностью определяется (то есть может быть точно восстановлена) последовательностью своих мгновенных значений λ(ti), следующих через интервалы времени
Т - длительность сообщения λ(t),
Если сообщение имеет длительность, то можем найти N, следовательно, заменяем ∞ на N.
N = 2fuT - число степеней свободы сообщения λ(t) - это минимальное количество независимых друг от друга параметров, которые полностью определяют непрерывное сообщение ( функцию λ(t), то есть зная значения N отсчетов λ(i∆t)мы можем точно восстановить непрерывную функцию λ(t), используя разложения Котельникова. В этой формуле значение λ(ti)= λ(i∆t) называется коэффициентом разложения функции λ(t), а функции
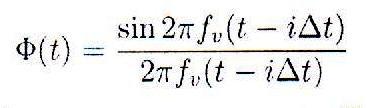
называются базовыми, функциями разложения Котельникова.
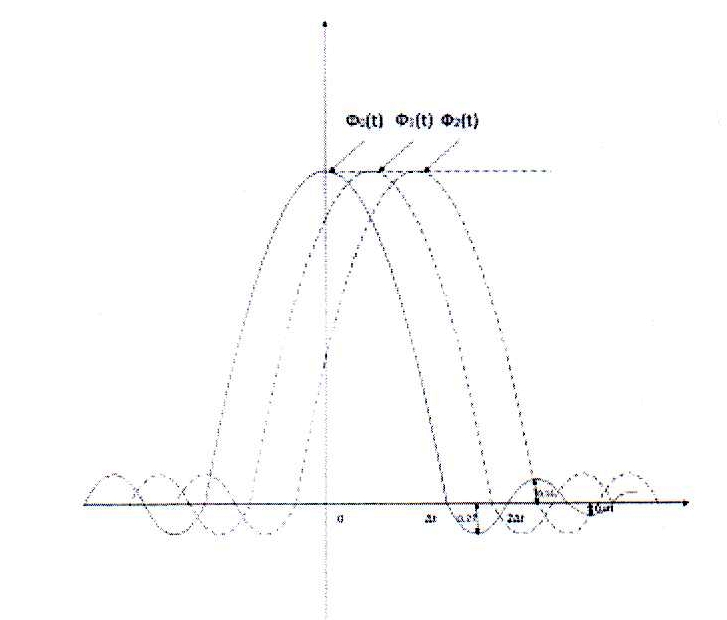
Рисунок.
1,2 и 3 степени свободы.
Чем сложнее геометрическая фигура, тем большее число степеней свободы у нее.
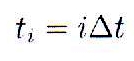
Базисные функцииsinx/x трудно генерировать, поэтому на практике восстановление непрерывного сообщения по полученным отсчетам выполняется по другим отсчетам, отличным от алгоритма теоремы Котельникова.
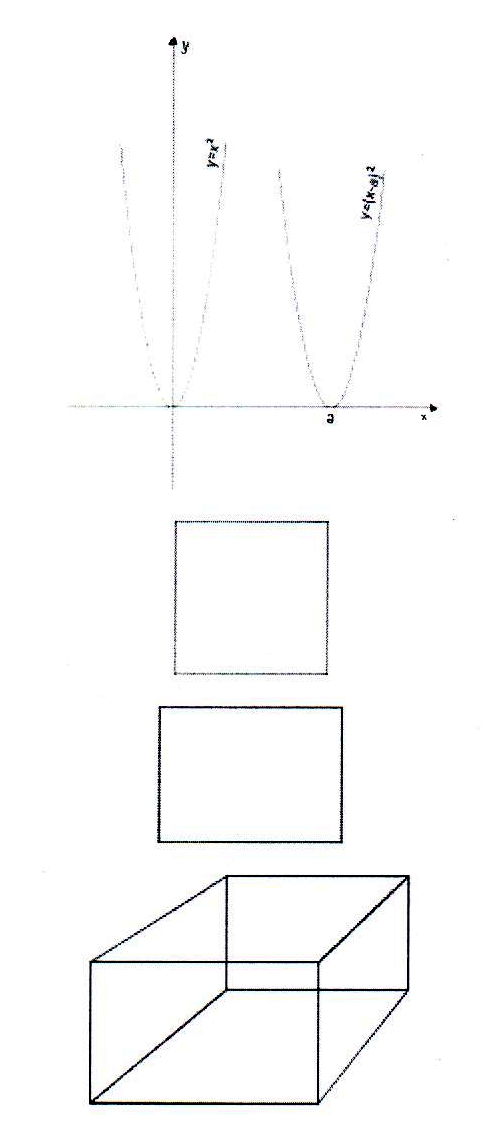
Рисунок.
Чтобы выяснить, какое значение имеет временная функция в момент времени i∆tнужно сложить все составляющие. Из последнего графика видно, что прежде, чем восстанавливать непрерывную функцию λ(t), необходимо получить все ее N отсчетов.
На практике для обеспечения восстановления непрерывной функции но мере получения ее отсчетов используют интервал дискретизации ∆t, на передающей стороне, меньший, чем требуется по теореме Котельникова 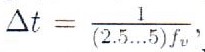 а на приемной стороне полученные отсчеты подают на низкочастотны фильтр, с выхода которого снимается непрерывное сообщение.
а на приемной стороне полученные отсчеты подают на низкочастотны фильтр, с выхода которого снимается непрерывное сообщение.
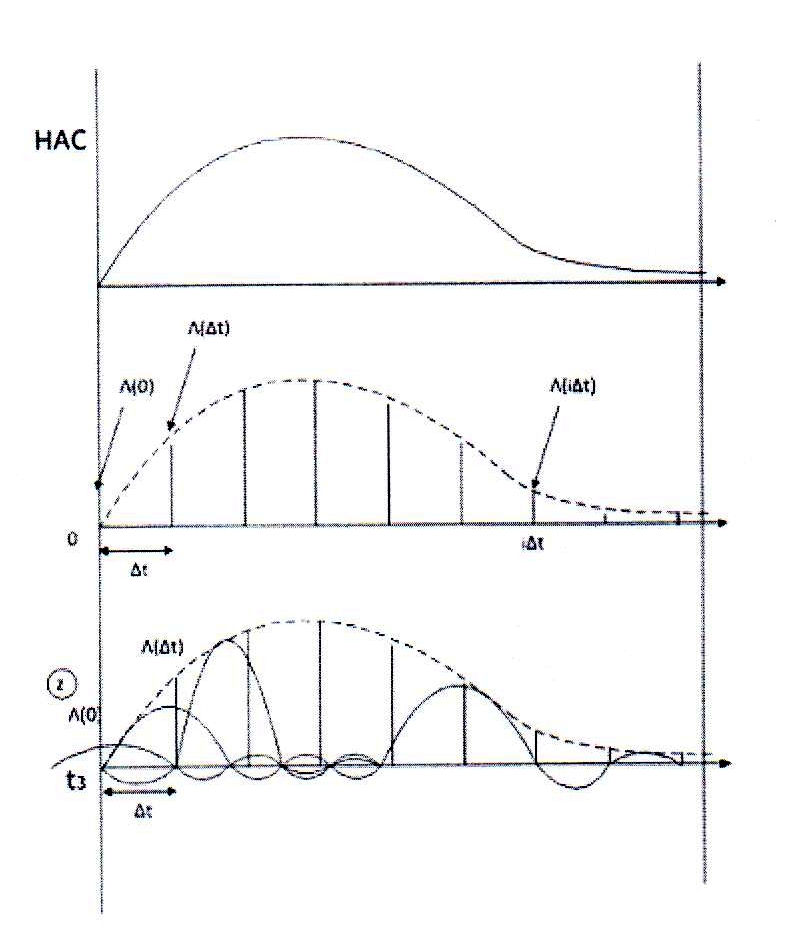
Рисунок.
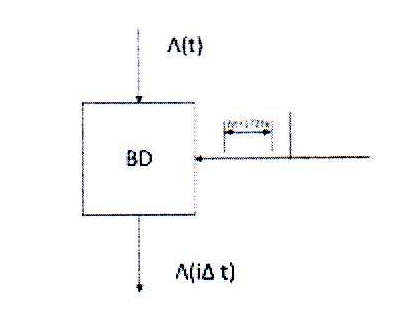
Рисунок.
Полоса пропускания фильтра определяется знамен им частотыfuв спектре передаваемого сообщения.
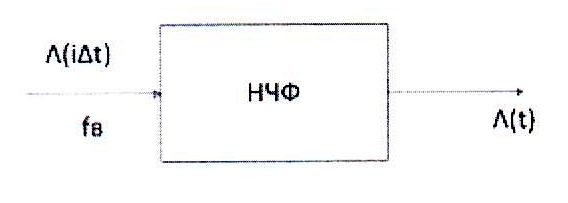
Рисунок.
12.2 Значение теоремы Котельникова
Позволяет осуществить многоканальную передачу сообщений в одном частотном канале связи путем разделения сообщений по времени, то есть между отсчетами одного передаваемого сообщения вставляют отсчеты нескольких других передаваемых сообщений.
13. Общие сведения об РЛС (радиолокационных системах)
13.1 Сингалы, используемые в радиолокации
1. Видеосигналы
а) Видеоимпульс прямоугольной формы
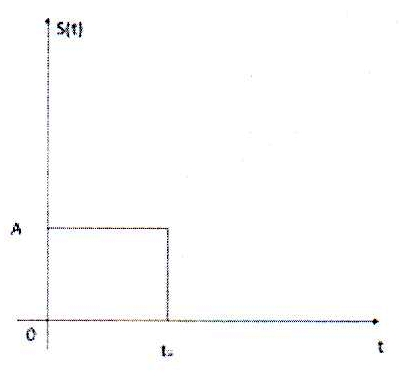
Рисунок.
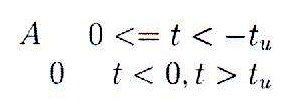
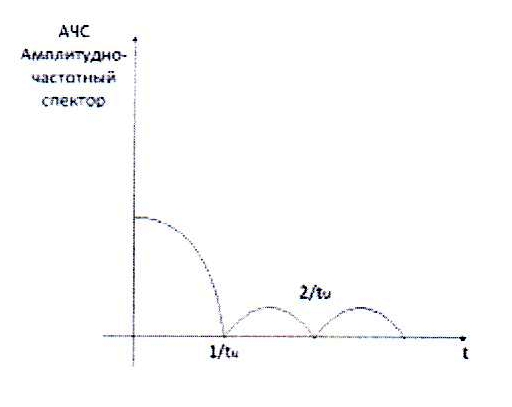
Рисунок.
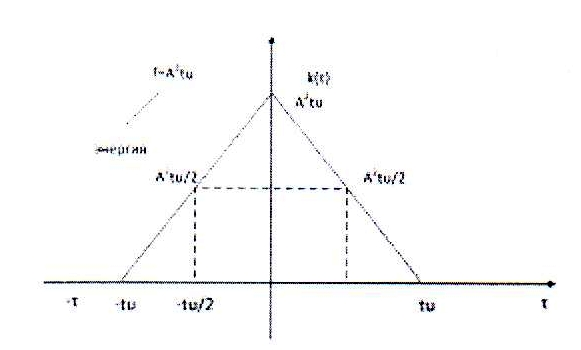
Рисунок.
- форумла, по которой происходит вычисление АКФ.
tu - длительность импульса.
АКФ показывает степень похожести сигнала S(t) на свою копию, сдвинутую по времени относительно положения сигнала S(t) на интервал времени τ в зависимости от величины этого сдвига τ.
S(t) - сигнал.
S(t-τ) - копия сигнала S(t), сдвинутая на интервал времени τ.
1) τ = -tu
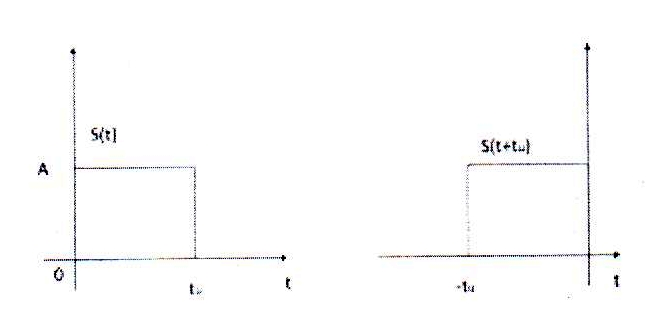
Рисунок.
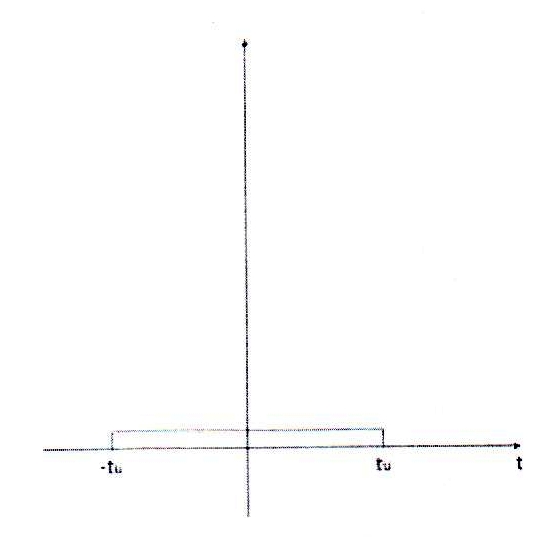
Рисунок.
2) τ = -tu/2
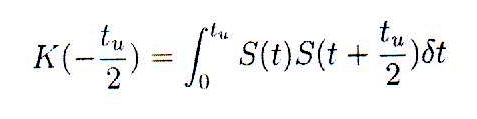
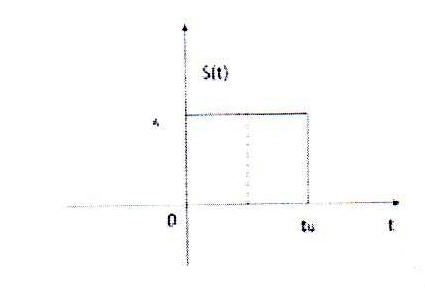
Рисунок.
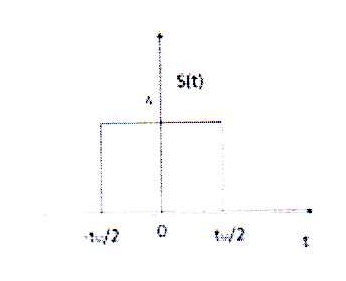
Рисунок.
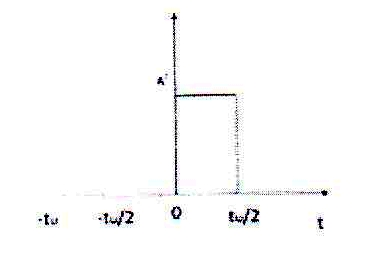
Рисунок.
3) r = 0
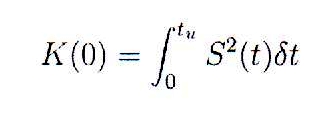
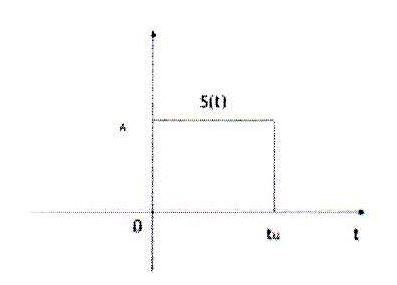
Рисунок.
Рисунок.
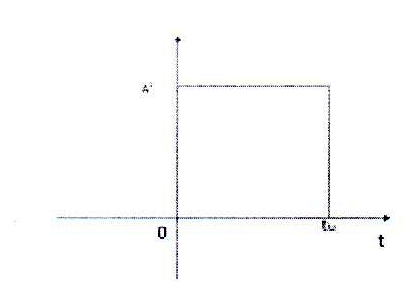
Рисунок.
4) τ = tu/2
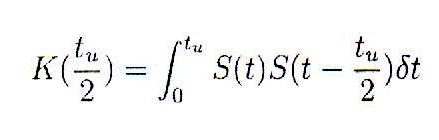
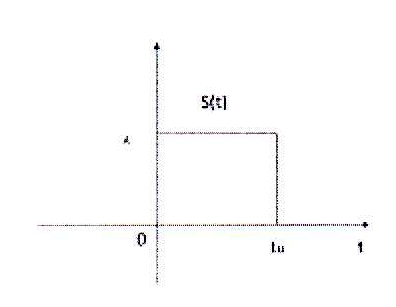
Рисунок.
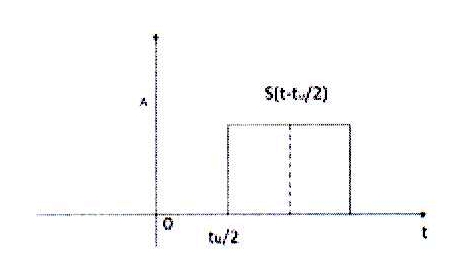
Рисунок.
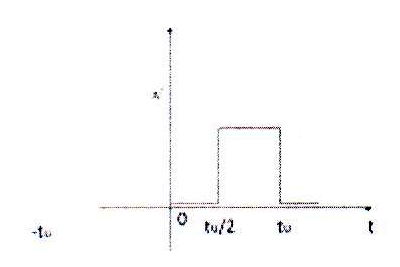
Рисунок.
b) Видеоимпульс гауссовой формы
Амплитудно-частотный сиктр(АЧС) a и b – декартовой системе координат.
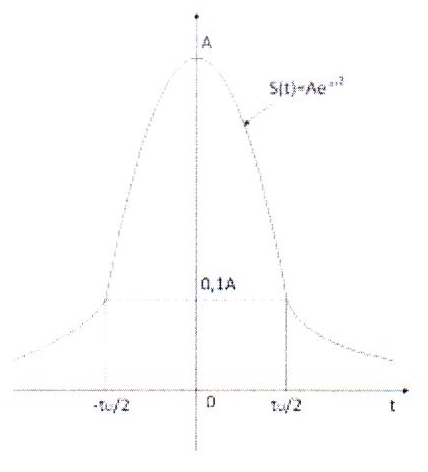
Рисунок. Рисунок.

 (8)
(8)

Рисунок.
c) Реальный видеоимпульс прямоугольной формы.
В реальной природе мгновенный рост от 0 до А и мгновенный спад от А до 0 нереальны.



Рисунок
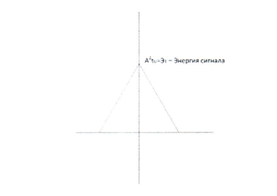
Рисунок Рисунок


d)Последовательность видеоимпульсов прямоугольной формы.
2)Радиоимпульсы.
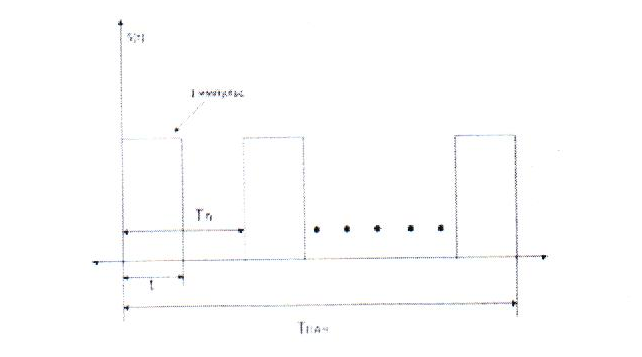
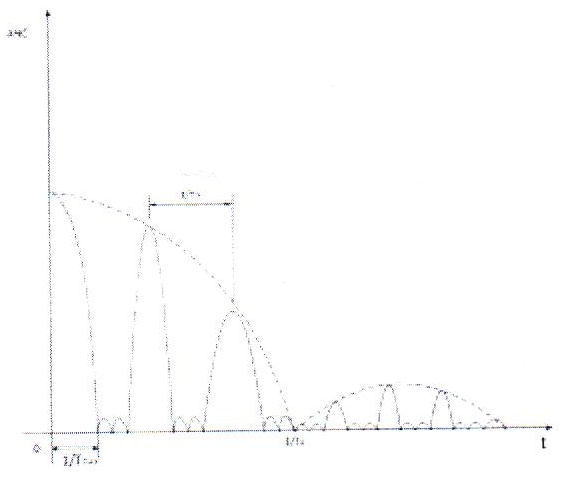
Рисунок Рисунок
а) Радиоимпульсы с прямоугольной огибающей.

0 <= t<= 
A(t) – огибающая прямоугольной формы (только сверху).
A – огибающая сигнала.

ƒ – частота заполнения.
Спектр сплошной и бесконечный.
Чем длиннее сигнал S(5),тем хуже его спектр.
При 
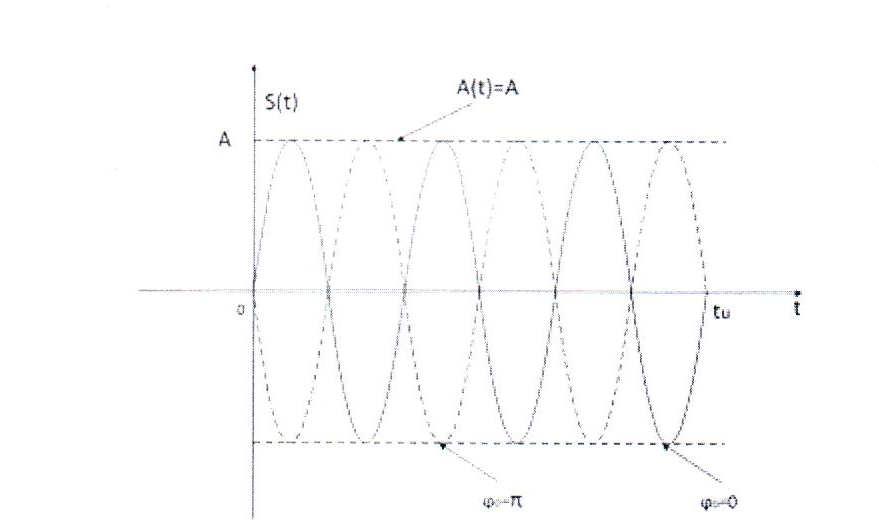
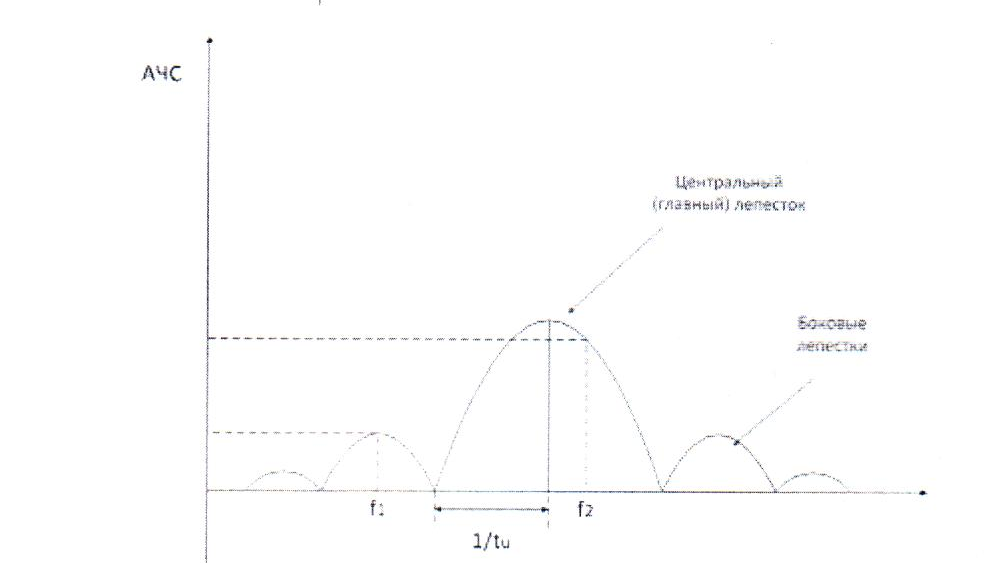
Рисунок Рисунок
b) Последовательность радиоимпульсов прямоугольной формы.
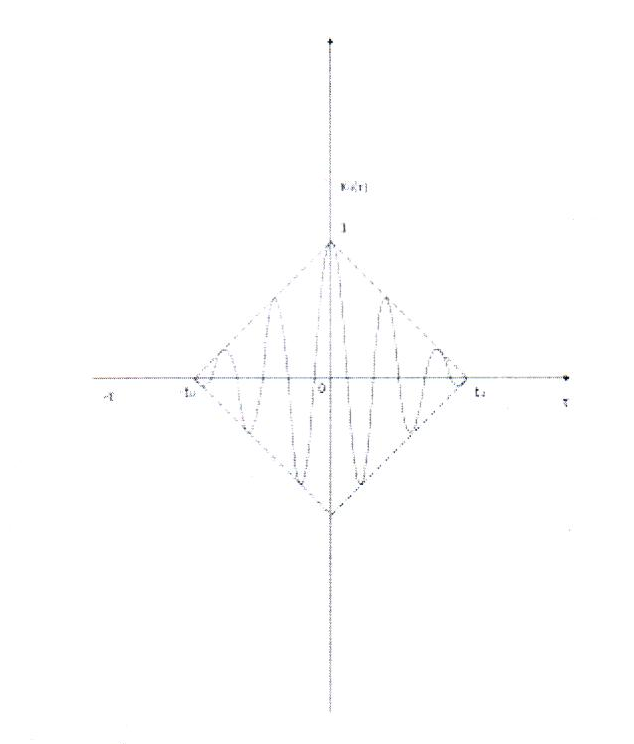
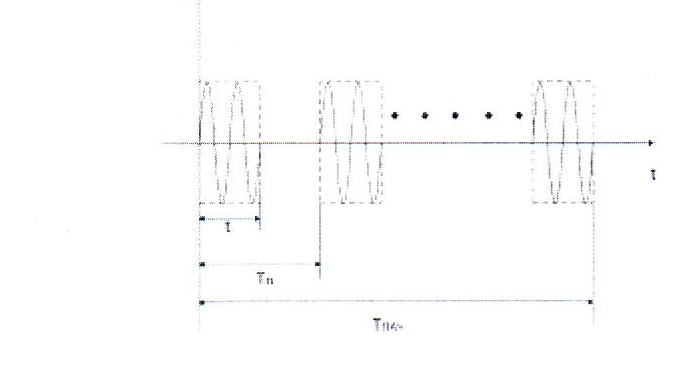
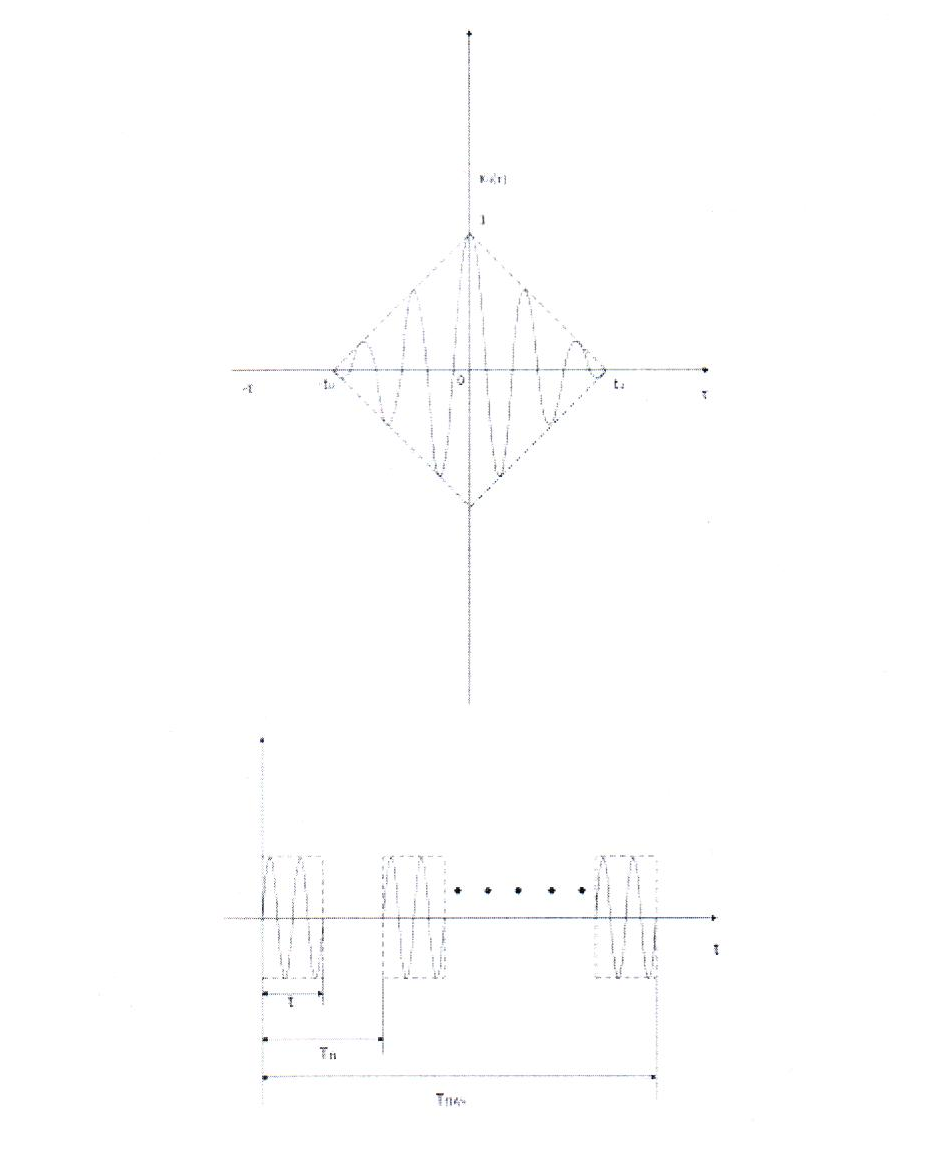
Рисунок Рисунок
3) Сложные сигналы
Отличаются от простых наличием внутриимпульсной частотной или фазовой модуляции. В результате чего их база  оказывается много больше единицы. База простых сигналов
оказывается много больше единицы. База простых сигналов 
Сложные сигналы качественно отличаются от простых.
1.ЛЧМ сигнал(сигнал с линейной частотной модуляцией) 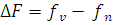 - девиация частоты.
- девиация частоты.
Автокорреляционная Функция ЛЧМ сигнала.
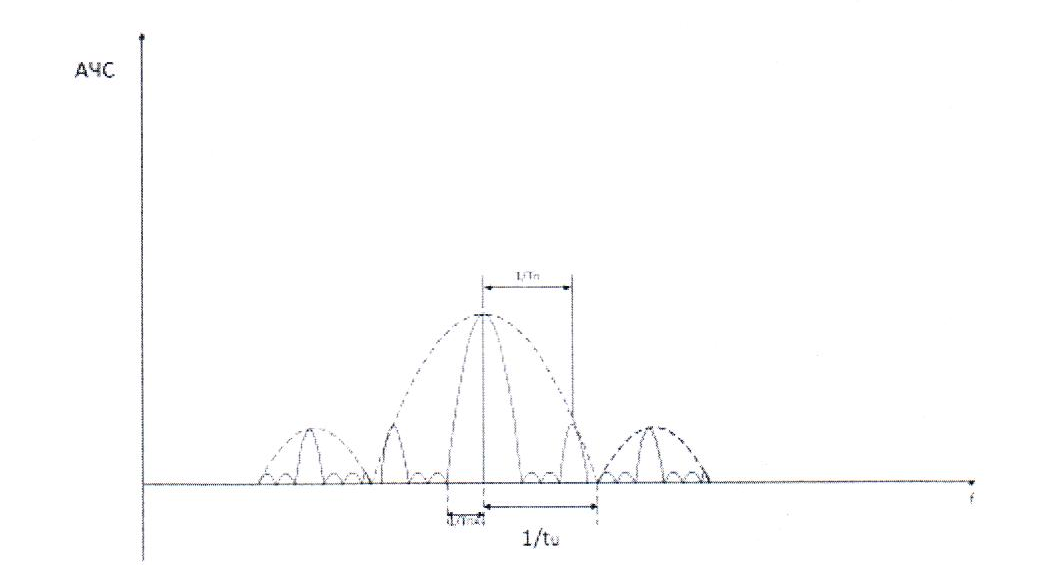
Рисунок. Рисунок
АКФ ЛЧМ стгнала содержит центральный лепесток и боковые лепестки, которые существенно меньше по амплитуде, чем центральный. Длительность центрального лепестка
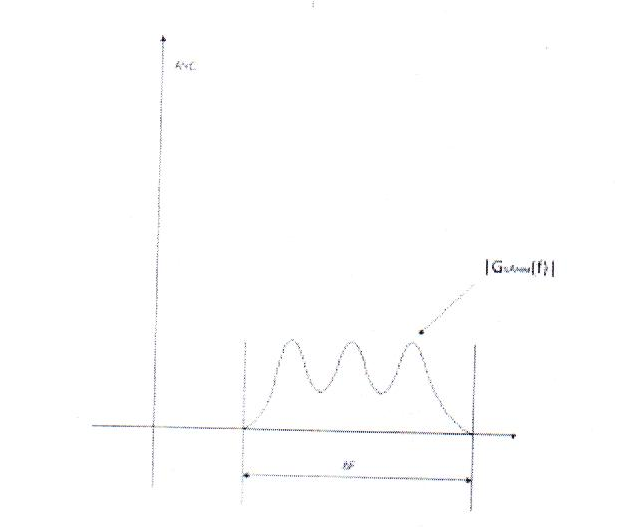
Щирина спектра АЧМ сигнала определяется девиацией частоты  и не зависит от длительности сигнала.
и не зависит от длительности сигнала. 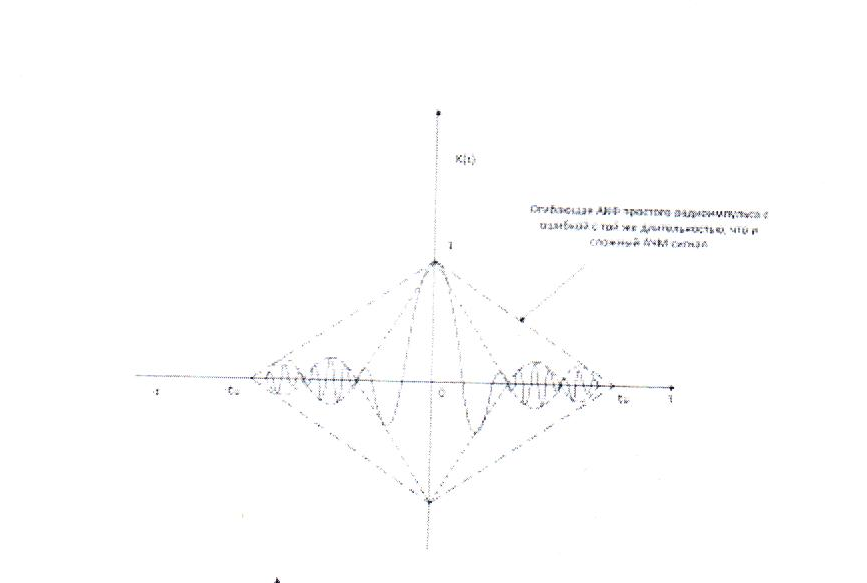
Рисунок.
Рисунок
2.ФМ сигналы (фазоманипулированные сигналы).
Внутри импульса меняется частота фазы заполнения.
В качестве примера рассмотрен сложный ФМ сигнал с семи элементным кодом Баркера.
Высота всех цоковых треугольников  (в 7 раз меньше, чем высота центрального лепестка).
(в 7 раз меньше, чем высота центрального лепестка).
Сложные сигналы позволяют различить два противоречия, которые не могут различить простые сигналы:
1. Они позволяют иметь одновременно хорошую разрешаюшую способность РЛС по длительности и скорости.
2. Позволяют одновременно иметь большую дальность действия РЛС и высокое разрешение по дальности.
Принятые и отраженные от цели сигналы (сложные) усиливаются приемником, которые не изменяют их формы. Затем с выхода приемника сигналы попадают на согласованный фильтр, задача которого максимизировать отношения сигнал-шум на своём выходе в момент окончания приема сигнала. Сигнал на выходе согласованного фильтра является разверткой по времени АКФ принятого сигнала. Максимизация отношения сигнал-шум сигнала нужна для того, чтобы увеличить вероятность правильного обнаружения целей и точность измерения координат.
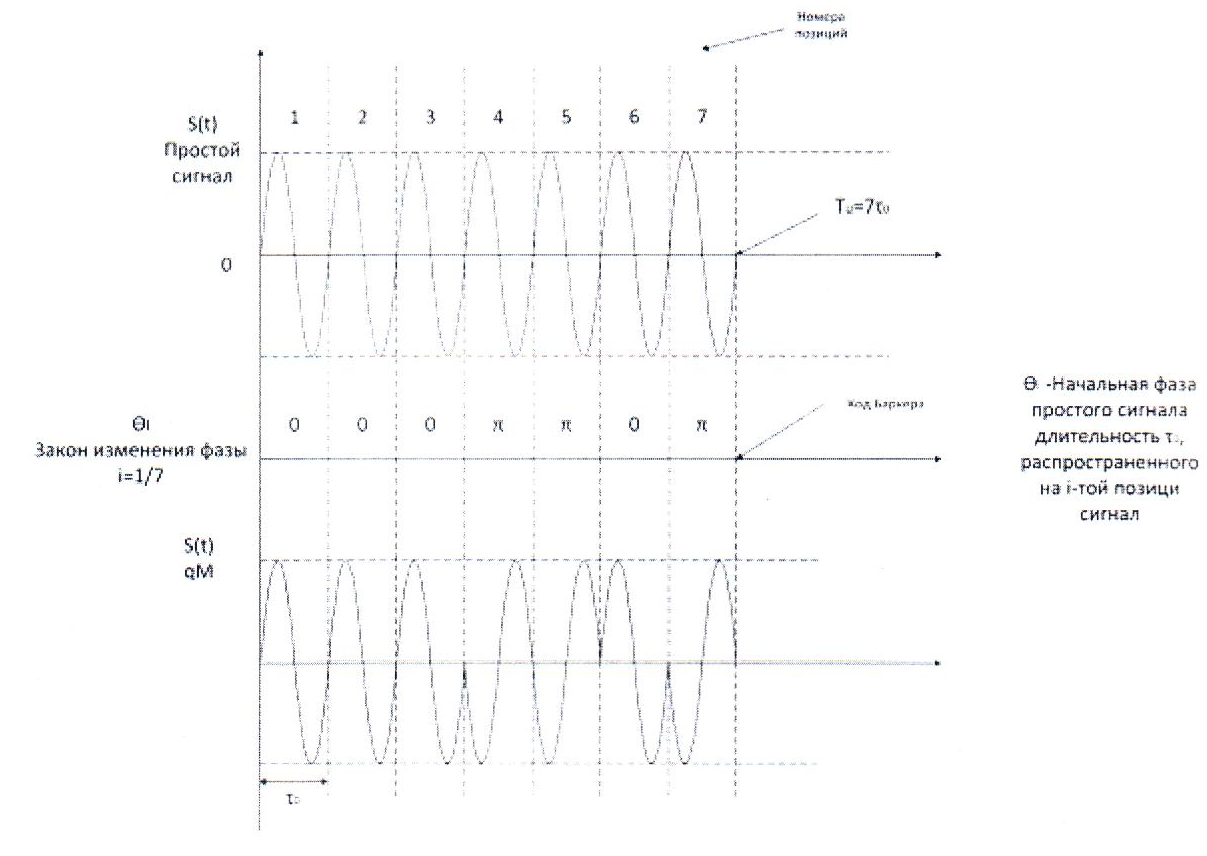
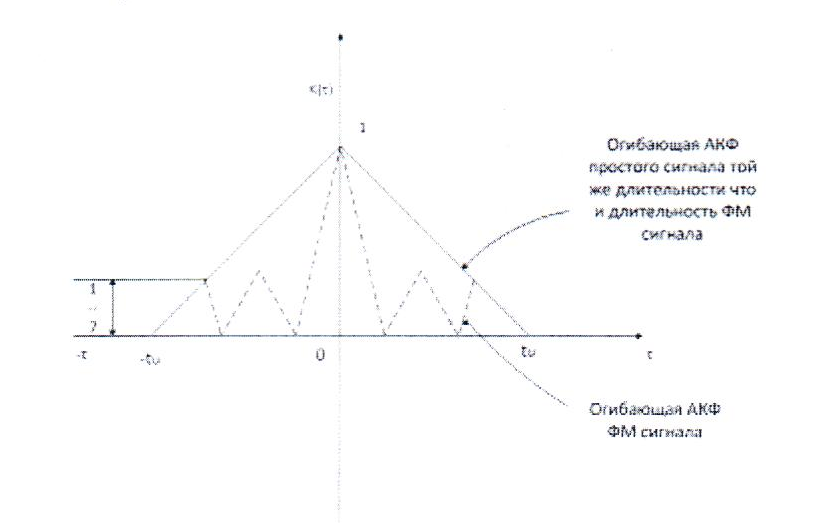
Рисунок Рисунок
Рисунок
Дата добавления: 2015-06-22; просмотров: 2079;