Гистерезисный двигатель.
Работа гистерезисного двигателя основана на действии гистерезисного момента. Для объяснения физической сущности возникновения этого момента обратимся к рис. 4.21, где показаны два полюса постоянного магнита (поле статора); между ними расположен цилиндр (ротор) из магнитно-твердого материала. Под действием внешнего магнитного поля ротор намагничивается. На стороне, обращенной к северному полюсу постоянного магнита, возбуждается южный полюс, а на стороне ротора, обращенной к южному полюсу постоянного магнита, – северный полюс. На ротор начинают действовать силы  , направленные радиально к его поверхности (рис. 4.21, а). Если полюсы постоянного магнита вращать вокруг ротора, то вследствие явления магнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля, и между осью поля ротора и осью внешнего поля появится угол
, направленные радиально к его поверхности (рис. 4.21, а). Если полюсы постоянного магнита вращать вокруг ротора, то вследствие явления магнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля, и между осью поля ротора и осью внешнего поля появится угол  . Силы , действующие на ротор, изменят свое направление также на угол , а тангенциальные составляющие этих сил
. Силы , действующие на ротор, изменят свое направление также на угол , а тангенциальные составляющие этих сил  создадут гистерезисный момент МГ (рис. 4.21, б).
создадут гистерезисный момент МГ (рис. 4.21, б).

Рис. 4.21. К вопросу о гистерезисном моменте
Явление магнитного запаздывания заключается в том, что частицы ферромагнитного материала (помещенного во внешнее магнитное поле), представляющие собой элементарные магниты, стремятся ориентироваться в соответствии с направлением внешнего поля. Если внешнее поле изменит свое направление, то элементарные частицы меняют свою ориентацию. Однако повороту элементарных частиц препятствуют в магнитно-твердых материалах внутренние силы молекулярного трения. Для изменения направления этих частиц необходима определенная м. д. с., вследствие чего перемагничивание ротора несколько отстает от изменения направления внешнего поля. Это отставание (магнитное запаздывание) характеризуется углом гистерезисного сдвига между вектором магнитного потока ротора  и вектором магнитного потока обмотки статора
и вектором магнитного потока обмотки статора  (рис. 4.21, в). Величина этого угла зависит исключительно от магнитных свойств материала ротора.
(рис. 4.21, в). Величина этого угла зависит исключительно от магнитных свойств материала ротора.
На преодоление сил молекулярного трения расходуется часть подводимой мощности, которая составляет так называемые гистерезисные потери. Величина этих потерь зависит от частоты перемагничивания ротора  , а, следовательно, от скольжения:
, а, следовательно, от скольжения:
 (4.12)
(4.12)
где  – величина гистерезисных потерь при неподвижном роторе (при s=1), т. е. в режиме короткого замыкания.
– величина гистерезисных потерь при неподвижном роторе (при s=1), т. е. в режиме короткого замыкания.
Так как электромагнитная мощность, передаваемая ротору, равна потерям в роторе, деленным на скольжение (см. § 8.8):
 (4.13)
(4.13)
а вращающий момент – электромагнитной мощности, деленной на синхронную угловую скорость:  , то, очевидно, величина гистерезисного момента не зависит от частоты вращения ротора (скольжения). График
, то, очевидно, величина гистерезисного момента не зависит от частоты вращения ротора (скольжения). График  представляет собой прямую, параллельную оси абсцисс (рис. 4.22).
представляет собой прямую, параллельную оси абсцисс (рис. 4.22).
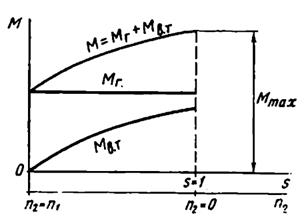
Рис. 4.22. Механические характеристики гистерезисного двигателя
Величина угла гистерезисного сдвига зависит от ширины петли гистерезиса: чем шире петля гистерезиса магнитного материала, тем больше угол гистерезисного сдвига. На рис. 4.23 представлены две петли гистерезиса: обычной стали (кривая 2) и сплава викаллой (кривая 1).

Рис. 4.23. Петля гистерезиса обычной стали и викалоя
Применение обычной стали для изготовления ротора не обеспечивает получение гистерезисного момента достаточной величины. Только магнитно-твердые материалы, такие, как сплавы типа викаллой, дают возможность получить большой гистерезисный момент. Роторы гистерезисных двигателей обычно делают сборными. Магнитно-твердая часть выполняется в виде шихтованного или массивного кольца 1, размещающегося на втулке 2 (рис. 4.24), жестко насаженной на вал 3.
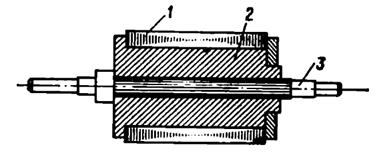
Рис. 4.24. Сборный ротор гистерезисного двигателя
В машинах с нешихтованным (массивным) ротором вращающееся поле статора наводит в роторе вихревые токи. В результате взаимодействия этих токов с полем статора возникает электромагнитный момент МВ.Т, величина которого пропорциональна скольжению:
 (4.13)
(4.13)
где  – потери на вихревые токи в роторе при s = 1, т. е. в режиме короткого замыкания, Вт;
– потери на вихревые токи в роторе при s = 1, т. е. в режиме короткого замыкания, Вт;  – угловая синхронная скорость, рад/с.
– угловая синхронная скорость, рад/с.
Наибольшей величины момент  достигает при неподвижном роторе (s=1), т. е. в момент пуска электродвигателя. Затем, по мере возрастания частоты вращения (уменьшения скольжения), момент
достигает при неподвижном роторе (s=1), т. е. в момент пуска электродвигателя. Затем, по мере возрастания частоты вращения (уменьшения скольжения), момент  убывает (см. рис. 4.21), при синхронной частоте он становится равным нулю.
убывает (см. рис. 4.21), при синхронной частоте он становится равным нулю.
Таким образом, электромагнитный вращающий момент гистерезисного двигателя создается совместным действием двух моментов: от вихревых токов и гистерезисного 
 (4.14)
(4.14)
На рис. 4.21 представлена зависимость результирующего момента гистерезисного электродвигателя от скольжения:  . Характер этой кривой зависит от соотношения
. Характер этой кривой зависит от соотношения  и
и  .
.
Гистерезисный двигатель может работать с синхронной и асинхронной частотами вращения. Однако работа двигателя в асинхронном режиме неэкономична, так как связана со значительными потерями на перемагничивание ротора, величина которых возрастает с увеличением скольжения. Из приведенных на рис. 4.25 рабочих характеристик видно, что при переходе гистерезисного двигателя в асинхронный режим его к. п. д. резко снижается.
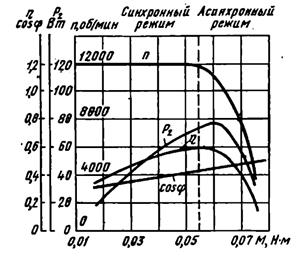
Рис. 4. 25. Рабочие характеристики гистерезисного двигателя
Достоинства гистерезисных двигателей – простота конструкции и надежность в работе, большой пусковой момент, плавность входа в синхронизм, сравнительно высокий к. п. д., бесшумность в работе, малое изменение тока от пуска до номинальной нагрузки  .
.
Недостатки гистерезисных двигателей – низкий коэффициент мощности  и сравнительно высокая стоимость.
и сравнительно высокая стоимость.
Кроме того, гистерезисные двигатели при резких колебаниях нагрузки склонны к качаниям, что создает неравномерности хода (вращения). Объясняется это отсутствием у гистерезисных двигателей пусковой клетки, которая при резких изменениях нагрузки оказывает на ротор успокаивающее (демпфирующее) действие. Наиболее сильные качания наблюдаются у шихтованного ротора, в котором вихревые токи сильно ограничены. Вызываемая качаниями неравномерность вращения ограничивает области применения гистерезисных двигателей.
В СССР гистерезисные двигатели выпускаются серийно на промышленную (50 Гц) и на повышенные (400, 500 Гц) частоты в трехфазном и однофазном исполнениях.
На рис. 4.26 показано устройство гистерезисного двигателя. В корпус 1 запрессован шихтованный сердечник статора 2 с обмоткой 3. Ротор двигателя сборный, он состоит из магнитно-твердого кольца 4, втулки 5 и вала 6. Подшипниковый шит 7 обеспечивает фланцевое крепление двигателя при его установке.
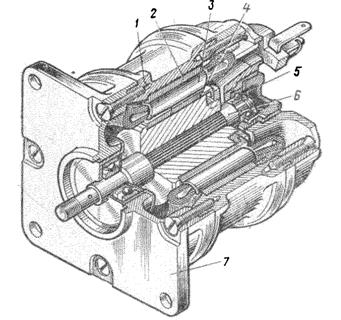
Рис. 4.26. Устройство гистерезисного двигателя
Дата добавления: 2015-06-12; просмотров: 2922;