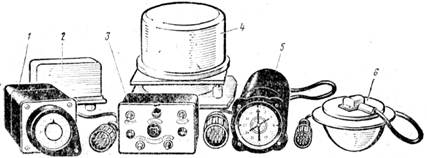
Гидродатчик; 2 — указатель
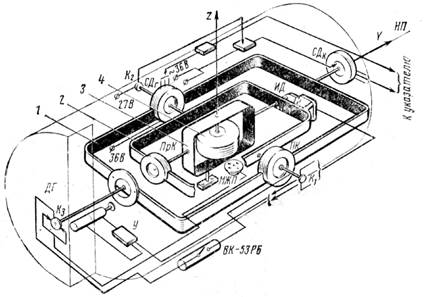
Основные агрегаты авиагоризонта АГД-1К. Гиродатчик представляет собой гироскоп с вертикально расположенной осью. Упрощенная функциональная схема представлена на рис. 29. Гиромотор 4 заключен вю внутреннюю раму 3 карданного подвеса, которая может вращаться вокруг оси уу в подшипниках наружной рамы 2. Наружная рама 2, подвешена к следящей раме 1 и имеет возможность поворачиваться вокруг оси хх. Для удержания главной оси гироскопа перпендикулярно к плоскости истинного горизонта имеется система коррекции, состоящая из маятникового жидкостного переключателя МЖП, который управляет работой исполнительных двигателей поперечной ПК и продольной коррекции ПрК. При работе авиагоризонта главная ось гироскоша должна удерживаться перпендикулярно к оси наружной рамы уу.
Выполнение этого условия обеспечивается следящей системой, состоящей из индукционного датчика ЯД, усилителя У и отрабатывающего двигателя ДГ. В качестве отрабатывающего двигателя используется двигатель-генератор ДГ-1.
При поворотах главной оси гироскопа относительно оси уу вследствие действия внешних сил ротор индукционного датчика поворачивается относительно своего статора и электрический сигнал, пропорциональный повороту главной оси, подается на вход усилителя. Усилитель управляет работой отрабатывающего двигателя, который через редуктор поворачивает следящую раму до тех пор, пока главная ось гироскопа не займет положение, перпендикулярное к оси наружной рамы. Система рассчитана таким образом, что скорость отработки следящей ремы больше, чем возможная скорость поворота главной оси
|
| Рис. 29. Упрощенная функциональная схема авиагоризонта |
гироскопа относительно оси наружной рамы, вследствие чего происходит быстрый возврат главной оси гироскопа к первоначальному положению, что обеспечивает правильные показания авиагоризонта после выполнения фигур высшего пилотажа.
Для уменьшения колебаний следящей рамы при отработке в системе предусмотрена отрицательная обратная связь. Углы крена и тангажа измеряют с помощью плоских сельсинов. Углы крена измеряются углом поворота корпуса авиагоризонта относительно оси уу следящей рамы и воспринимаются сельсин-датчиком СДК. Со статорных обмоток сельсин-датчика СДК снимается сигнал, пропорциональный углу крена. Углы тангажа измеряют по авиагоризонту как углы поворота корпуса авиагоризонта (и связанной с корпусом следящей рамы 1) относительно наружной рамы 2 карданного подвеса, стабилизированной гироскопом в плоскости истинного горизонта.
Углы тангажа воспринимаются сельсин-датчиком СДТ. Со статорных обмоток сельсин-датчика СДТ снимается сигнал, пропорциональный углу тангажа.
Для повышения точности измерения углов крена и тангажа при эволюциях самолета предусмотрено отключение поперечной коррекции гироскопа при разворотах и продольной коррекции при действии продольных ускорений. Отключение поперечной коррекции осуществляется с помощью выключателя коррекции ВК-53РШ. Отключение продольной коррекции (при взлете, разгоне и_ торможении) производится с помощью жидкостного от-ключателя ОЖ продольных ускорений.
Для отсчета углов крена, больших 90°, изменяется фаза напряжения управляющего сигнала, снимаемого с индукционного датчика ИД, на 180°. Это осуществляется с помощью коммутатора К, расположенного на внешней оси наружной рамы 2. При выполнении самолетом вертикальных фигур (т. е. при углах тангажа больше 90°) корпус авиагоризонта вместе со следящей рамой 1 без ограничений поворачивается вокруг оси хх наружной рамы 2 карданного подвеса. В этом случае следящая рама гиродатчика займет перевернутое положение.
Для обеспечения правильных показаний указателя авиагоризонта при выполнении полета с углами тангажа больше 90° имеется коммутатор К2.
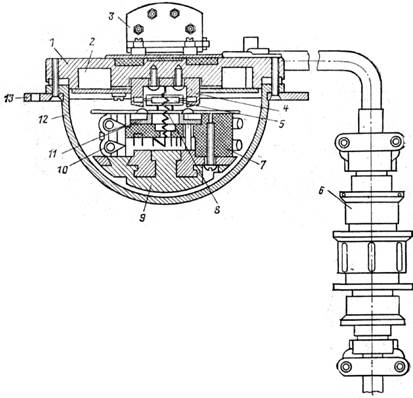
Для уменьшения времени готовности к работе авиагоризонта в гиродатчике предусмотрен электромеханический арретир. Устройство арретира позволяет быстро привести рамы прибора и гиромотор в строго определенное положение относительна корпуса прибора и, следовательно, самолета. Кинематическая схема электромеханического дистанционного арретира АГД-1 представлена на рис. 30. При нажатии красной кнопки «Арре-тировать в горизонтальном полете», находящейся на лицевой стороне указателя, подается напряжение на двигатель 11, который, вращаясь, заставляет поступательно перемещаться шток 10 с помощью пальца, который двигается по винтовой прорези, т. е. винт перемещается, а вращающаяся гайка неподвижна. Шток 10 упирается в дополнительную следящую раму 5, имеющую кольцо 1 клиновидного профиля, поэтому при давлении на раму со стороны штока кольцо 1 вместе с гироузлом поворачивается вокруг оси рамы 5 до тех пор, пока ролик 9 не окажется в нижней части кольца. При этом плоскость рамы 5 параллельна плоскости крыла самолета. Затем шток 10 перемещает профильную планку 7, которая упирается в кулачок 6 и создает момент вокруг оси внешней рамы 4. Под действием момента гироскоп прецесшрует вокруг оси внутренней рамы и доходит до упора, после чего прецессия прекращается и гиро-скоп начинает поворачиваться вокруг оси внешней рамы до тех пор, пока выступ планки 7 не войдет в вырез кулачка 6, зафиксировав таким образом раму 4 в положении, при котором ось внутренней рамы гироскопа параллельна продольной оси самолета.
Палец 8, упираясь в кулачок 2, устанавливает внутреннюю раму 3 в положение, при котором ось собственного вращения гироскопа перпендикулярна к осям внешней и внутренней рам карданового подвеса. Затем шток 10 под действием возвратной пружины, имеющейся в нем, откидывается в исходное положение и дает возможность планке 7 освободить кулачки 2 и 6. Таким образом, арретир, установив рамки гироузла в определенное положение, сразу же освобождает их.
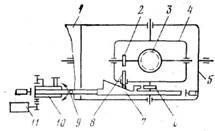
Рис-30- Схема арретирующего устройства авиагоризонта АГД-1
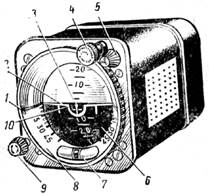
Рис. 31. Указатель авиагоризонта АГД-1:
1 — индекс центровки тангажа; 2—- линия искусственного горизонта; 3 — нулевой индекс; 4 —кнопка арретироваиия; 5 — лампа сигнализации; 6 — цилиндрическая шкала тангажа; 7 — указатель скольжения; 8 — шкала кренов; 9 — кремальера центровки тангажа; 10 — силуэт самолета
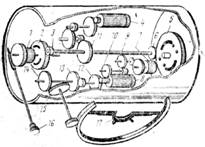
Рис.32. Кинематическая схема указателя авиагоризонта АГД-1: 1 — сельсин-приемник тангажа; 2, 3, 5, 6, 9 и 13 — шестерни; 4 — двигатель-генератор тангажа; 7 — сельсин-приемник крена;8 — двигатель-генератор крена; 14 и 15 — конические шестерни; 16 — кремальеры; 17 — силуэт самолета
Если арретирование производится в горизонталь'нам полете, то собственная ось вращения гироскопа устанавливается по направлению вертикали самолета. Поэтому осуществлять арретирование следует только в горизонтальном полете, о чем напоминает экипажу надпись на кнопке «Ар-ретировать в горизонтальном полете». Если произвести арретирование, например, при крене, то при переходе в горизонтальный - полет авиагоризонт будет показывать ложный крен. Правда, под действием маятниковой коррекции собственная ось гироскопа установится в вертикальное положение, и, естественно, ложные показания исчезнут, но на это уйдет время, за которое экипаж может совершить ошибки в пилотировании. Следует отметить, что электрическая схема арретирования устроена таким образом, что при включении авиагоризонта под напряжение арретирование происходит автоматически, без нажатия кнопки.
Диета н ц и о п н ы и указатель (рис. 31) воспроизводит угльГ крена и тангажа самолета, - замеряемые гиро-датчиком. Кинематическая схема указателя представлена на рис. 32. Указатель авиагоризонта состоит из следящих систем тангажа и крена, кото-оые обеспечивают соответствующие перемещения подвижных элементов индикации -картушки со шкалой тангажа и силуэта самолета.
Следящая система тангажа представляет собой дистанци-
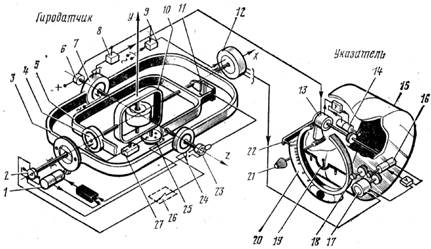
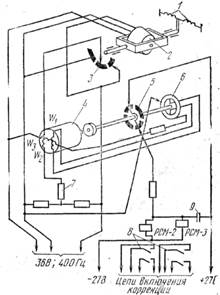
Рис. 33. Связь гиродатчика с указателем авиагоризонта АГД-1:
1, 14 и 16 — двигатели-генераторы; 2, 6 и 23 — коммутаторы; 3, 5 и 10 — рамки; 4 и 24 — электродвигатели; 7, 12, 13 и 17 — сельсины; 8 и 9 — реле; 11 — индукционный датчик; 15 — картушка; 18 — шестерня; 19 и 22 — индексы; 20 — шкала кренов; 21 — кремальера; 25— жидкостный маятник; 26 — контакты выключателя коррекции; 27 —
жидкостной выключатель
онную передачу, работающую в трансформаторном режиме. Сельсин-датчик СДТ, расположенный в гироагрегате, электрически связан с сельсин-приемником СПТ тангажа, расположенным в указателе (рис. 33). Кроме сельсинов, в следящую систему тангажа входят усилитель, редуктор и двигатель-генератор ДГ-0,5.
Следящая система тангажа работает следующим образам: сигнал рассогласования, пропорциональный углам тангажа самолета, с сельсин-приемника СПТ подается на вход усилителя, а после усиления — на управляющую обмотку двигателя ДГ-0,5. Двигатель через редуктор передает вращение картушке и ротору сельсин-приемника. Картушка поворачивается относительно силуэта самолета, и указатель воспроизводит углы тангажа. Ротор СПТ будет поворачиваться до тех пор, пока на входе усили-теля сигнал не будет равен нулю, т. е. пока роторная обмотка СП не установится перпендикулярно к роторной обмотке (в гироагрегате). Отрицательная обратная связь обеспечивает демпфирование колебаний следящей системы тангажа.
Редуктор следящей системы тангажа имеет две выходные шестерни: 3 — для отработки ротора сельсин-приемника 1 и 6 — для отработки картушки. Одному градусу поворота ротора сельсина (самолета) соответствует 1,7° поворота картушки. Этим обеспечивается увеличенный масштаб отсчета углов тангажа во всем диапазоне шкалы.
В указателе предусмотрена возможность регулировки положения горизонта шкалы тангажа (т. е. картушки) в диапазоне ± 12° поворотом статора сельсин-приемника СПС с помощью кремальеры 16 центровки. Центровка картушки производится по индексу, расположенному на лицевой части указателя. Следящая система крена состоит из сельсин-датчика крена СДК в гироагрегате, сельсин-приемника крена СПК, усилителя, двигатель-генератора ДГ-0,5 и редуктора. Работа системы аналогична работе следящей системы тангажа. В указателе АГД-1К показания крена и тангажа разделены.
Крены самолета имитируются поворотом силуэта самолета. Отсчет углов крена производится по оцифрованной шкале кренов, причем стрелкой служит конец крыла силуэта. Для отсчета углов тангажа служит цилиндрическая шкала (картушка), ось вращения которой параллельна поперечной оси самолета. В центральной части силуэта самолета нанесена белая точка, являющаяся нулевым индексом тангажа. Для большей наглядности шкала тангажа выше линии искусственного горизонта окрашена в серый цвет, а ниже — в черный (для самолетов, в которых приборы освещаются красным светом). Индикация положения самолета относительно плоскости горизонта естественная, т. е. соответствующая тому образу о положении самолета относительно земли, который представляет себе экипаж.
На лицевой стороне указателя имеется сигнальная лампа 5 (см. рис. 31), которая загорается, во-первых, если происходит процесс арретирования и, во-вторых, при неисправностях в цепях питания гиромотора и постоянного тока. При нажатии на кнопку подается питание на электродвигатель, начинается процесс арретирования и загорается сигнальная лампа. После окончания арретирования, т. е. приведения главной оси гироскопа к вертикали, сигнальная лампа гаснет. Если по каким-либо причинам пропадут две фазы переменного тока, то напряжение подается на лампу и она загорается.
Если прекратится подача постоянного тока, то обесточится другое реле и загорится та же лампа, что говорит о том, что пользоваться авиагоризонтом нельзя. Если на гиродатчик не подается напряжение какой-либо из трех фаз, система сигнализации не срабатывает.
Основные технические данные авиагоризонта АГД-1К:
питание гиродатчика и указателя осуществляется от преобразователя ПТ-200Ц переменным током напряжением 36 В, частотой 400 Гц и от бортовой сети постоянным током напряжением 27±10%В. Потребляемый ток от преобразователя 1,6 А, от бортовой сети 0675 А;
готовность к работе после включения питания (при стояночных углах самолета по крену и тангажу не более ±4°): при температуре от +50 до —30° С 1 мин, при температуре от —30 до —60° С 1,5 мин;
рабочие углы, в пределах которых авиагоризонт обеспечивает правильные показания по крену и тангажу —360°, за исключением углов 85—95° (пикирование и кабрирование);
Ошибки в показаниях углов крена после выполнения разворотов на углы до 360° не более ±3°. Ошибка в показаниях углов крена и тангажа после выполнения любых фигур сложного пилотажа не более ±5°;
послевзлетная ошибка не более 3°;
авиагоризонт работает нормально при температуре от 50 до минус 60° С и высоте не более 25 000 м;
масса агрегатов: гиродатчика 7 кг, указателя 2,6 кг.
Работа с авиагоризонтом АГД-1К. Перед вылетом необходимо произвести внешний осмотр прибора и убедиться в его исправности, включить автоматы защиты сети «АГД» и «ПТ-200» на правом электрощитке. При включении загорается сигнальная лампа на лицевой стороне прибора, которая должна погаснуть не позже чем через 15 с. Через 1 — 1,5 мин после включения авиагоризонт должен правильно показывать стояночные углы тангажа и крена (обычно стояночный угол крена самолета равен нулю). В полете следует периодически контролировать правильность работы авиагоризонта, особенно это относится к полетам при отсутствии видимости. Контроль показаний углов крена ведется по указателю скольжения и указателю поворота (шарик в центре, стрелка указателя поворота на нулевом делении). Правильность показаний углов тангажа контролируется по вариометру, указателям скорости и высоты.
При неправильных показаниях авиагоризонта необходимо установить режим прямолинейного горизонтального полета и кратко временно нажать кнопку автоматического арретирования («Арретир только в горизонтальном полете»). При нажатии кнопки должна загореться сигнальная лампа на указателе. Арретир устанавливает плоскость следящей рамки параллельно основанию гироагрегата, а главную ось гироскопа — нормально к этому основанию. После окончания процесса арретирования происходит автоматическое разарретирование гиродатчика. Лампа гаснет.
Пользоваться кнопкой арретира на углах тангажа более ±4° нельзя, так как иначе после арретироваагия будет выключена продольная коррекция. При запуске, а также при нормальной его работе на земле и в полете пользоваться кнопкой арретира запрещается.
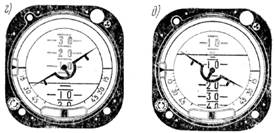
Показания прибора в горизонтальном полете (рис. 34, а). При нулевом положении индекса центровки указатель показывает угол тангажа. Если самолет летит горизонтально, что может быть установлено по вариометру или другим способом, а скорость, плотность воздуха и центровка постоянны, то картушка будет иметь постоянное смещение относительно индекса нулевого тангажа на значение, соответствующее углу атаки. В этом случае для удобства пользования следует при помощи кремальеры установить картушку на нуль. Тогда отклонение картушки от нулевого положения будет свидетельствовать о наборе высоты или планировании.

|
|
Рис- 34. Показания авиагоризонта АГД-1:
а — горизонтальный полет без крена; б — подъем без крена; в— снижение без крена; г—подъем с левым креном; д — снижение- с правым креном
Показания прибора при наборе высоты и снижении. При наборе высоты без крена (рис. 34,б) силуэт самолета остается неподвижным, а линия искусственного горизонта на картушке уходит вниз и пилот видит силуэт на сером фоне. При снижении (рис. 34, в)самолета пилот видит силуэт самолета на черном фоне.
Показания прибора при разворотах. При правом крене без набора высоты или снижении шкала тангажа остается неподвижной, а силуэт самолета поворачивается вправо. При этом пилот видит правое полукрыло силуэта на черном фоне, а левое — на сером. При левом крене силуэт поворачивается влево, а линия искусственного горизонта на картушке уходит вниз (рис. 34,г). При правом крене со снижением силуэт поворачивается вправо, а линия горизонта уходит вверх (рис. 34,д).
12. Выключатель коррекции ВК-53РШ
Выключатель коррекции (рис. 36) служит для отключения поперечной коррекции в гиродатчике АГД-1 и азимутальной коррекции курсовой системы ГМК-1А при разворотах. Выключатель коррекции устанавливается в отсеке радиооборудования на левом борту.
Выключатель коррекции самостоятельной роли не играет и применяется в комплексе с другими приборами для улучшения их работы при выполнении самолетом разворотов. В основу его
|
работы положено свойство гироскопа с двумя степенями свободы совмещать вектор угловой скорости ротора гироскопа с вектором угловой скорости вращения основания, на котором укреплен гироскоп.
| Рис. 35. Выключатель коррекции ВК-53РШ |
|
При возникновении угловой скорости гироскопа относительно вертикальной оси самолета гироскоп отклоняется от среднего положения, в котором он удерживается пружи-лами, и включает электрическую цепь механизма задержки.
По истечении некоторого времени (5—15 с) после начала действия угловой скорости механизм задержки замыкает цепь обмоток реле, которые срабатывают и выключают цепи коррекции. Таким образом, благодаря работе механизма задержки коррекция выключается только при длительном воздействии угловой скорости. Принципиальная схема выключателя коррекции показана на рис. 36.
| Рис. 36. Принципиальная схема выключателя коррекции ВК-53РШ: 1 — пружины; 2 — гироскоп; 3 — контактные ламели; 4—электродвигатель с редуктором; 5 — контактный диск; 6— потенциометр; 7 — резисторы; 8 — контакты реле РСМ-2 и РСМ-3; 9 — искрогасящий конденсатор; W1, W2, W3 — обмотки электро-двигателя |
При возникновении угловой скорости относительно вертикальной оси самолета гироскоп выключателя коррекции ВК-53РШ отклоняется и связанная с ним щетка выключателя переходит со средней обесточенной ламели на одну из ламелей, находящихся под током, замыкая таким образом цепь питания обмотки управления W3. В результате взаимодействия магнитных полей, созданных обмотками W1 и W3, ротор электродвигателя ДИД-0,5 начнет вращаться и поворачивать с помощью редуктора щетки потенциометра и контакты выключателя. На щетках потенциометра появится напряжение, возрастающее с увеличением угла поворота щеток.
В обмотке W2 возникает ток, который создаст магнитное поле. Направление этого поля будет противоположным полю, созданному током, протекающим по обмотке W3.
Работа электродвигателя ДИД-0,5 продолжается до тех пор, пока магнитный поток от обмотки W3 не станет равным магнитному потоку от обмотки W2, после чего двигатель остановится. Электродвигатель ДИД-0,5, вращая с помощью редуктора контакты выключателя, переместит их в такое положение, при котором цепь питания обмоток реле РСМ-2 и РСМ-3 замкнется. Реле сработают и выключат коррекцию.
По окончании разворота самолета гироскоп под действием пружины возвратится в среднее положение, при котором щетка выключателя перейдет на обесточенную ламель. Обмотка W3 обесточится.
Электродвигатель ДИД-0,5 под действием момента, созда-ваемого обмоткой W2, приводит щетки потенциометра в первоначальное положение. По мере перемещения щеток напряжемте, снимаемое ими с потенциометра, будет уменьшаться, что приведет к уменьшению тока в обмотке W2 и момента, создаваемого этой обмоткой. Электродвигатель остановится, когда щетки потенциометра займут свое первоначальное положение, так как напряжение на них будет равно нулю. Вращение двигателя приведет к размыканию контактов выключателя и разрыву цепи питания обмоток реле. Контакты реле РСМ-3 при этом замкнутся и подключат цепь коррекции. Подключение ВК-53РШ к авиагоризонту и курсовой системе производится с помощью своего штепсельного разъема.
13. Курсовая система ГМК-1А
Назначение и принцип действия. Курсовая система ГМК-1А представляет собой комплекс взаимосвязанных устройств (магнитных, гироскопических и астрономических), позволяющих определить курс самолета, а при совместной работе с автоматическим радиокомпасом выдать магнитные (или истинные) пеленги и курсовые углы радиостанции и самолета. В зависимости от решаемых задач и условий полета система может работать в одном из трех режимов: гирокомпаса ГПК, магнитной коррекции МК, астрономической коррекции АК (режим АК на самолете Як-18Т не используется).
Основным режимом работы курсовой системы является режим гирополукомпаса, при котором система выдает ортодро-мический курс самолета, который контролируется и периодически корректируется по сигналам от магнитного корректора индукционного датчика ИД-3.
Курсовая система ГМК-1А основана на использовании свойств гироскопа с тремя степенями свободы, а также свойств
|
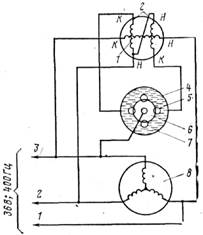
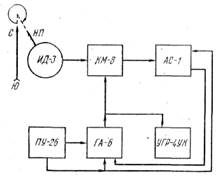
Рис. 37. Курсовая система ГМК-1:
1 — коррекционный механизм КМ-8; 2 — автомат согласования аС-1; 3— пульт управления ПУ-26; 4 — пгроагрегат ГА-6; 5 — указатель УГР-4УК; 6 — индукционный дат-
чик ИД - 3
чувствительного элемента индукционного датчика ИД-3, которые позволяют определять магнитный курс относительно плоскости магнитного меридиана.
В комплект курсовой системы ГМК-1А (рис. 37) входят: индукционный датчик ИД-3, коррекцнонный механизм КМ-8, гироагрегат ГА-6, пульт управления ПУ-26, автомат согласования АС-1 и указатель АГР-4УК. Кроме того, в комплекте курсовой системы используется выключатель коррекции ВК-53РШ, который является гироскопическим измерителем угловой скорости разворота самолета и служит для отключения цепей коррекции гироскопических приборов при выполнении самолетом разворотов и виражей. Выключение коррекции происходит при угловой скорости, превышающей 0,1—0,3 град/с.

|
| Рис. 38. Индукционный датчик ИД-3. |
Индукционный датчик ИД-3 (р.пс. 38) предназначен для определения магнитного курса самолета, необходимого для корректировки гироскопического курса, снимаемого с гироагрегата ГА-6. Он установлен на правой ОЧК между нервюрами № 9 и 10. Индукционный датчик состоит из следующих основных узлов: карданного подвеса, поплавка, чувствительного элемента и корпуса с крышкой. Карданный подвес датчика позволяет сохранить горизонтальное положение чувствительного элемента при наклонах корпуса в любую сторону на 15°. Чувствительный элемент датчика ИД-3 состоит из трех магнитных зондов 10, закрепленных на платформе под углом 60°, образуя так называемый индуктивный треугольник (рис. 39), Каждый магнитный зонд состоит
|
| Рис. 39. Устройство индукционного датчика ИД-3: / — крышка; 2 — компенсационная камера; 3 — девиационный прибор; 4 — стойка; 5 — кольцо; 6 — разъем; 7 — платформа; 5 — жгут; 9 — груз; 10 — зонд; 11 — подвеска; 12~— корпус; 13— основание |
из двух параллельно расположенных сердечников, выполненных из пермаллоя. Сердечники имеют две обмотки: намагничивающую и сигнальную. Обмотки намагничивания всех трех зондов соединены последовательно и питаются переменным током напряжением 1,5 В с частотой 400 Гц.
Сигнальные обмотки охватывают оба сердечника, соединены звездой и тремя проводами электрически связаны со статорны-ми обмотками сельсин-приемника коррекционного механизма КМ-8. Для крепления датчика к самолету в основании его сделаны три овальных отверстия, позволяющих устранять установочные ошибки в пределах ±20°. Сверху на крышке расположен девиационный прибор, предназначенный для уменьшения полукруговой девиации. Прибор состоит из двух продольных и двух поперечных валиков с заделанными в них магнитами. Поперечные валики уменьшают девиацию в направлении «Север — Юг», продольные — в направлении «Запад — Восток».
Принцип работы чувствительного элемента индукционного датчика заключается в следующем. Если магнитный зонд поместить в магнитное поле земли с напряженностью горизонталь-
ной составляющей Н3, то в сердечниках произойдет концентрация земного магнитного поля и возникнет постоянный магнитный поток Ф3, пропорциональный магнитной проницаемости материала сердечников.
Переменный ток с частотой f, протекающий по намагничивающей обмотке 2 (рис. 40), периодически намагничивает сердечник и изменяет магнитную проницаемость. При максимальных значениях намагничивающего тока происходит насыщение сердечников, резко уменьшается их магнитная проницаемость и, следовательно, уменьшается в сердечниках магнитный поток Ф3. При уменьшении намагничивающего тока и прохождении его через нулевые значения, магнитная проницаемость сердечников увеличивается и достигает максимального значения. При этом магнитный поток Ф3 становится максимальным.
|
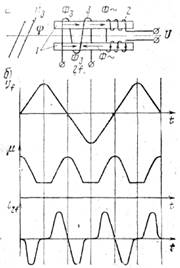
Таким образом, постоянный магнитный поток в сердечниках преобразуется в переменный пульсирующий и по закону электромагнитной индукции в сигнальных обмотках возникает э.д.с., зависящая от угла, заключенного между направлением продольной оси зонда и направлением горизонтальной составляющей магнитного поля Земли. За один период изменения намагничивающего тока дважды изменяется магнитная проницаемость сердечников (магнитный поток). Таким образом, если намагничивающий ток изменяется с частотой f, то магнитный поток Ф3 в сердечниках изменится с двойной частотой 2f и наведет в сигнальных обмотках э.д.с. с частотой 2f.
| Рис. 40. Схема магнитного зонда индукционного датчика ИД-3 и диаграмма напряжений в сигнальной обмотке магнитного зонда: 1 — пермаллоевые стержни; 2 — намагничивающая обмотка; 3 — сигнальная обмотка |
Намагничивающие обмотки соединены так, что при питании их переменным током в сердечниках создаются встречные переменные магнитные потоки Ф, направленные навстречу друг другу. Эти потоки взаимно компенсируются и не наводят э.д.с. в сигнальных обмотках. Намагничивающие обмотки нужны только для преобразования постоянного магнитного поля Земли в сердечниках в переменное пульсирующее магнитное поле. Если ось сердечников совпадает с направлением магнитного поля Земли, то э.д.с. максимальная, если ось пер-лендикулярна к направлению магнитного поля, то э.д.с. равна нулю.
Коррекционный механизм КМ-8 (см. рис. 37), расположенный на правой панели приборной доски,
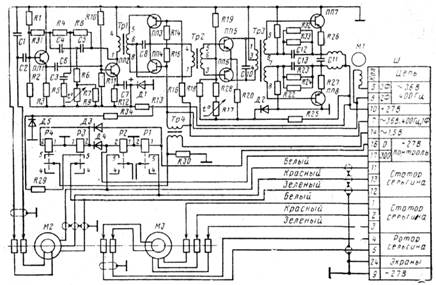
Рис. 41. Схема коррекционного механизма
предназначен для связи индукционного датчика ИД-3 с гироагрегатом ГА-6, устранения четвертной девиации и инструментальных погрешностей с помощью лекального устройства, ввода магнитного склонения, приведения в полете магнитного курса к ортодромическому, осуществления контроля и коммутации электрических цепей при проверке контрольных узлов, указания магнитного курса.
•Принципиальная схема коррекционшого механизма представлена на рис. 41. Она состоит из следующих частей: узла отработки магнитного курса, в который входят сельсин-прием-ник М2, усилитель и отрабатывающий двигатель М1; узла контроля, в который входят реле Р1, Р2, Р3 и Р4; узла связи кор-рекцнонного механизма с гироагрегатом, которая осуществляется сельсином М3.
Усилитель служит для усиления и преобразования сигналов с частотой 800 Гц, поступающих от индукционного датчика, до мощности, необходимой для подачи на управляющие обмотки двигателя М1. Усилитель состоит из избирательного усилителя, делителя частоты и усилителя -мощности. Собран на транзисторах ПП1, ПП2, ППЗ, ПП4, ПП5, ПП6 типа МП15, ПП7 и ПП8 типа МП-24Г. Для устранения четвертной девиации и инструментальной погрешности в корпусе коррекционного механизма помещается лекальное устройство.
На лицевой части прибора находятся две шкалы: внешняя и внутренняя. Отсчет магнитного курса производится по внеш-
ней шкале с помощью стрелки. Шкала имеет градуировку от 0 до 360° с оцифровкой через 30°, цена делания 2°.
В коррекционном механизме КМ-8 предусмотрена возможность ввода угла условного магнитного склонения в пределах ±180°, что позволяет приводить магнитный курс к ортодроми-ческому, а при необходимости вводить поправки на магнитное склонение. Для этой цели с помощью кремальеры поворачивается отметчик, который показывает вводимый угол магнитного склонения относительно неподвижной внутренней шкалы. В коррекционном механизме имеется схема контроля, которая обеспечивает выдачу контрольных углов 0±10° и 300±10° при проверке курсовой системы на работоспособность перед полетом.
Гироагрегат ГА-6 (см. рис. 37) предназначен для осреднения показаний магнитного курса, снимаемого с индукционного датчика ИД-3 в режиме МК, выдачи гироскопического курса в режиме ГПК, определения углов разворота самолета, для дистанционной выдачи магнитного и гироскопического курса и углов отклонения от него на указатель УГР-4УК.
Принцип действия гироагрегата ГА-6 основан на свойстве гироскопа с тремя степенями свободы, у которого главная ось вращения расположена горизонтально и стремится сохранить свое направление в пространстве (в азимуте) постоянным.
Электрическая схема гироагрегата ГА-6 показана на рис. 42. В качестве гиромотора М1 используется асинхронный трехфазный двигатель переменного тока ГМВ-524. Частота вращения ротора гиромотора 22000—23000 об/мин. Для уменьшения трения на горизонтальной оси гироскопа применены вращающиеся подшипники, вращение которых осуществляется двигателями М2 и М3 типа ДИД-0,1ТА. Изменение направления вращения двигателей М2 и М3 осуществляется узлом реверса, состоящим из микропереключателей В2, В3 и реле Р3 и Р4. Стабилизация оси вращения гиромотора в вертикальной плоскости осуществляется с помощью маятникового жидкостного переключателя В1 и мотора-корректора М4 (рис. 43).
Жидкостный переключатель — это медный сосуд, заполнен-ный токопроводящей жидкостью (рис. 44). В верхней части сосуда имеется воздушный пузырек. В основании сосуда закреплены две пары контактов, из которых одна пара не используется. Жидкостный маятниковый переключатель является чувствительным элементом системы горизонтальной коррекции. Он укреплен в нижней части гиромотора.
Мотор-корректор представляет собой двухфазный реверсивный асинхронный электродвигатель, работающий в режиме короткого замыкания и являющийся исполнительным элементом. Ротор мотора-корректора укреплен на внешней карданной раме, а статор — на корпусе прибора.
Принцип работы системы горизонтальной коррекции заключается в следующем. Когда главная ось горизонтальна, жидко-
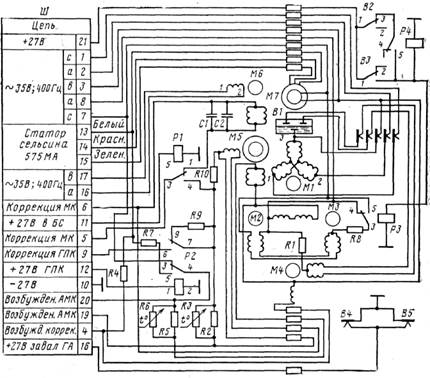
Рис. 42. Схема гироагрегата ГА-6
стный переключатель тоже горизонтален. Пузырек воздуха находится в центре. Токопроводящая жидкость равномерно перекрывает контакты. По управляющим обмоткам мотора-корректора протекают одинаковые по амллитуде, но противоположные по направлению токи. Результирующий момент мотора-корректора равен нулю.
При отклонении главной оси гироскопа (из-за трения и не-сбаланса трех осей гироскопа и т. д.) от горизонтального положения один контакт закроется полностью, например, такопроводящей жидкостью, а другой — пузырьком воздуха. При этом электрические сопротивления контактов станут неодинаковыми, и по управляющим обмоткам пойдут токи различной амплитуды. Возникает момент мотора-корректора, который вызывает прецессию гироскопа, главная ось которого возвращается в горизонтальное положение.
Для компенсации «кажущегося ухода» гироскопа в режиме ГПК, обусловленного суточным вращением Земли, т. е. для устранения так называемой широтной погрешности в гироагрегате имеется система азимутальной коррекции, состоящая из мосто-
|
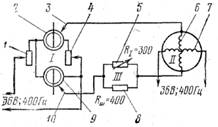
вого датчика сигналов, азимутального мотор-корректора М5 и термокомпенсатора (рис. 45).
| Рис. 43- Схема горизонтальной коррекции: 1 — обмотка возбуждения; 2—управляю-ющие обмотки; 3 — исполнительный элемент; 4 — чувствительный элемент; 5 — контакты; 6 — пузырек воздуха; 7 — токо-проводящая жидкость; 8 — гиромотор; Н— начало обмотки; К— конец обмотки |
Мостовой датчик предназначен для выдачи сигналов напряжения в управляющую обмотку азимутального мотора-корректора и расположен в пульте управления ПУ-26. Одна из диагоналей измерительного моста питается переменным током напряжением 36 В с частотой 400 Гц, а вторая диагональ подсоединена к концам управляющей обмотки азимутального мотор-корректора. Мостовой датчик имеет четыре переменных резистора, из которых два называют потенциометрами — широтный 2 и поправочный 9 а два других реостатами — регулировочный 4 и подстроечный 1.
Широтный потенциометр служит для подачи сигналов напряжения на управляющую обмотку в зависимости от широты ме-ста, поправочный потенциометр — для подачи дополнительного напряжения на управляющую обмотку азимутального мотор-корректора при разбалансировке гироскопа в процессе эксплуатации. Регулировочный реостат служит для регулировки напряжения, подаваемого на измерительный мост переменного тока, подстроечный реостат — для окончательной балансировки измерительного моста при установке шкалы широт на отметку 0.
Рис. 44. Жидкостный переключатель
|
| Рис-45. Схема широтной коррекции: / — мостовой датчик сигналов; // — двигатель азимутальной коррекции; /// — термокомпенсатор; 1 — подстроечный реостат; 2 — широтный потенциометр; 3 и 10 — движки потенциометров; 4—регулировочный реостат; 5 — терми-стор; 6 — управляющая обмотка; 7 — обмотка возбуждения; 8 — сопротивление шунта; 9 — попра.вочный потенциометр |
Температурная стабилизация момента (а следовательно, и скорости прецессии), создаваемого мотор-корректором М5 при работе его в различных температурных условиях, осуществляется терморезисторами R3и R6(см. рис. 42), включенными в цепи обмоток управления и возбуждения мотора-корректора, параллельно резисторам R2 и R5 соответственно.
|
| Рис. 46. Пульт управления ПУ-26: / — лампы подсвета; 2 — переключатель широты; 3 — лампа «Завал ГА» ; 4 — ручка широтного потенциометра; 5 — шкала широт; 6 --переключатель режимов работы; 7 — переключатель 3К; 8 — переключатель «Контроль» |
Принцип работы азимутальной коррекции заключается в следующем. При установке на пульте управления ПУ-26 ручки широтного потенциометра на нужную широту напряжение с шпротного потенциометра, пропорциональное «кажущемуся уходу» гироскопа на данной широте, поступает па управляющую обмотку азимутального мотора-корректора, ротор которого укреплен на горизонтальной оси гироагрегата ГА-6. При этом мотор-корректор начнет работать и создаст момент, который вызовет прецессию гироскопа в нужном направлении и с необходимой скоростью. Прецессия гироскопа скомпенсирует «кажущийся уход» гироскопа, вызванный наличием вращения Земли.
Узел быстрого согласования состоит из сельсин-датчика и электродвигателя ДИД-0,5ТА с редуктором. Однофазная роторная обмотка сельсин-датчика крепится на оси карданной рамы, а трехфазная статарная обмотка — на корпусе гироагрегата. Узел быстрого согласования работает только при нажатии влево и вправо переключателя задатчика курса ЗК, расположенного на пульте управления ПУ-26. В остальное время узел согласования не работает, так как управляющий сигнал на ДИД-0,5ТА не поступает. Резисторы R7, R8 и R10являются ограничивающими в цепи мотора М5 и обеспечивают необходимую прецессию гироскопа гироагрегата.
Режим работы гироагрегата определяется состоянием реле Р1 и Р2, срабатывающих от командных сигналов +27 В, поступающих из курсовой системы. В режиме быстрого согласования сельсина М7 по курсу используется двигатель М6 (ДИД-0,5ТА). Конденсаторы С1 и С2 задают необходимый сдвиг фазы напряжения на управляющих обмотках двигателя М6 при его работе от усилителя автомата согласования. Сигнал курса выдается указателю с сельсина М7.
Гироагрегат ГА-6 состоит из следующих узлов: корпуса прибора, гироузла, горизонтальной и азимутальной коррекции и узла быстрого согласования. Для предохранения деталей прибора от воздействия коррозии, контактных пар от окисления и подгорания, а также для улучшения условий работы гиромо-тора корпус прибора закрывается герметично.
Пульт управления ПУ-26 (рис. 46) предназначен для выбора режима работы: магнитной коррекции МК, гирополукомпаса ГПК, астроксррекции АК; ввода широтной коррекции в гироскоп (вследствие суточного вращения Земли) как в северном, так и в южном полушариях; компенсации уходов гироскопа в азимуте от его несбалансированности; установки шкалы указателя на заданный курс в режиме гирополукомпаса; включения быстрого согласования в режиме магнитной коррекции; контроля работы системы в полете и на земле; контроля завала гироскопа гироагрегата.
Пульт управления ПУ-26 имеет встроенный красный подсвет. На лицевую панель пульта выведены:
переключатель режимов 6 (МК, ГПК, АК);
переключатель 2 широтной коррекции. При полете в северном полушарии он должен быть установлен на отметку «Сев.», при полете в южном полушарии — на отметку «Южн.»;
переключатель ЗК 7, предназначенный для быстрого согласования по магнитному курсу (выполняет функции кнопки быстрого согласования) в режиме МК и установки шкал указателей на заданный курс (выполняет функции задатчика курса) в режиме ГПК;
переключатель «Контр.» 8 для проверки работоспособности курсовой системы в режиме МК;
шкала 5 и ручка 4 широтного потенциометра для ввода широтной коррекции в гироскоп;
два ламподержателя 1 с лампами СМК-37 для подсветки лицевой панели красным светом;
ламподержатель 3 с лампой СМ-37 и светофильтром с надписью «Завал ГА».
На светопроводе нанесены поясняющие надписи.
Автомат согласования АС-1 (см. рис. 37) предназначен для: обеспечения режима пуска, включения и отключения быстрого согласования при переключении режимов работы системы, отключения коррекции по сигналу, поступающему от выключате-

|
| Рис. 47. Указатель УГР-4УК |
ля коррекции, усиления сигналов в следящей системе сель-син-датчик гироагрегата — сельсин-приемник коррекцион-ного механизма. Автомат согласования состоит из корпуса, на котором укреплены две платы, закрытые кожухом. На одной плате смонтирован усилитель, собраный на полупроводниковых триодах, на другой — блок реле времени.
|
Указатель УГР-4УК (см. рис. 37) предназначен для отсчета курса самолета, углов разворота, пеленгов и курсовых углов радиостанции.
| Рис.48. Структурная схема курсовой системы ГМК-1А |
В корпусе (рис. 47) закреплен статор сельсин-приемника, ротор которого и шкала курса установлены на курсовой оси. Курсовая ось через редуктор связана с отрабатывающим двигателем. Обмотки статора электрически связаны с обмотками статора сельсина-датчика гироагрегата. Сигнал рассогласования с ротора снимается, через коллектор и щетки поступает на вход усилителя, смонтированного в указателе. Отрабатывающий двигатель ДИД-0,5 вращает ось вместе со шкалой курса* до тех пор, пока сигнал рассогласования станет равен нулю. Отсчет курса производится по внутренней шкале против треугольного индекса, нанесенного на неподвижной шкале.
Для запоминания заданного курса в указателе имеется кур-созадатчик, закрепленный на зубчатом колесе, которое фрикци-онно связано с курсовой осью. Для установки курсозадатчика на заданный курс необходимо нажать на кремальеру до упора и повернуть ее.
Усилитель выполнен на полупроводниковых приборах и смонтирован на отдельной плате. Узел дистанционной связи с радиокомпасом состоит из сельсина-приемника БС8-АМ. На оси ротора сельсина укреплена стрелка, с помощью которой по шкале курса отсчитываются пеленги радиостанции и самолета, а по неподвижной шкале — курсовые углы радиостанции.
Структурная схема курсовой системы ГМК-1А показана на рис. 48. В курсовой системе ГМК-1А, как и в большинстве современных дистанционных гиромагнитных компасов, использует-
ся принцип работы курсового гироскопа с индукционным датчиком курса ИД-3. Этот принцип заключается в том, что индукционный датчик выдает сигналы, соответствующие по напряжению и фазе курсу самолета. Сигналы поступают в курсовой гироскоп гироагрегата для определения и стабилизации показаний указателя. Курсовая система ГМК-1А, установленная на самолете Як-18Т, имеет два режима работы, устанавливаемых переключателем на пульте управления: МК и ГПК.
Режим магнитной коррекции.Режим работы курсовой системы, при котором осуществляется непрерывная совместная -работа курсового гироскопа с индукционным датчиком, называется режимом магнитной коррекции. В режиме МК решается задача по определению магнитного курса. Роль магнитного корректора в этом режиме выполняет индукционный датчик ИД-3 с коррекционным механизмом КМ-8. Электрические сигналы магнитного курса, вырабатываемые индукционным датчиком, поступают в коррекционный механизм и затем в гироагрегат. Дистанционная электрическая передача ИД-3 — КМ-8 — ГА-6 обеспечивает непрерывное автоматическое ориентирование курсового гироскопа по магнитному меридиану.
При работе курсовой системы в режиме МК значение магнитного курса воспроизводится указателем курса через цепь последовательных следящих систем, которые состоят из следующих звеньев: ИД-3 —КМ-8; КМ-8 —ГА-6 и ГА-6 — УГР-4УК.
При включении переключателя на пульте управления ПУ-26 в положение МК включается режим магнитной коррекции. Следящая система ИД-3 — КМ-8 работает следующим образом. При повороте индукционного датчика относительно плоскости магнитного меридиана в сигнальных обмотках датчика наводится переменная э. д. с., пропорциональная углу поворота, и следящая система рассогласуется. Напряжение сигнала рассогласования по трем проводам поступает на статарные обмотки сельсин-приемника коррекционного механизма. Токи, протекающие по обмоткам статора, возбуждают в нем переменный магнитный поток, который индуктирует в обмотке ротора сельсин-приемника КМ-8 переменную э.д.с., пропорциональную углу поворота индукционного датчика.
Напряжение сигнала с роторной обмотки сельсин-приемника КМ-8 снимается и подается на вход полупроводникового усилителя, расположенного в коррекционном механизме, где сигнал усиливается и с выхода усилителя поступает на управляющую обмотку электродвигателя ДИД-0,5ТА, который через редуктор поворачивает ротор сельсин-приемника КМ-8 на угол, равный углу поворота индукционного датчика в азимуте. Следящая система индукционный датчик — коррекционный механизм согласуется, и электродвигатель ДИД-0,5ТА останавливается. В этом случае ротор сельсин-приемника КМ-8 займет вполне определенное положение относительно магнитного меридиана. На оси
ротора сельсин-приемника КМ-8 укреплена стрелка, с помощью которой по шкале, расположенной на лицевой части прибора, можно отсчитать ненаправленный магнитный курс, т. е. курс, не учитывающий четвертной девиации и инструментальных погрешностей дистанционных передач.
Таким образом, всякому повороту чувствительного элемента индукционного датчика ИД-3 на какой-либо угол относительно-плоскости магнитного меридиана Земли будет соответствовать, поворот на тот же угол ротора сельсин-приемника коррекцион-ного механизма КМ-8.
Для передачи сигнала курса на гироагрегат ГА-6 в коррек-ционном механизме КМ-8 имеется второй сельсин-приемник, статор которого электрически связан со статором сельсин-датчика гироагрегата. Сельсин-датчик гироагрегата совместно со вторым сельсин-приемником коррекциоиного механизма, электродвигателем ДИД-0,5ТА гироагрегата и усилителем автомата согласования АС-1 образуют следящую систему коррекционный механизм— гироагрегат.
При повороте ротора сельсин-приемника коррекционного ме-ханизма КМ-8 на некоторый угол произойдет рассогласование между сельсин-датчиком гироагрегата и вторым сельсин-приемником коррекционного механизма. При этом сигнал рассогласования снимается с обмотки ротора сельсин-датчика и подается на вход усилителя автомата согласования АС-1, где усиливается. С выхода усилителя он поступает на управляющую обмотку электродвигателя ДИД-0,5ТА, который поворачивает статор сельсин-датчика гироагрегата до тех пор, пока напряжение на обмотке ротора сельсин-приемника КМ-8 не будет равно нулю, т. е. когда статор сельсин-датчика займет определенное (согласованное) положение относительно магнитного меридиана.
Следовательно, следящая система КМ-8 — ГА-6, согласуется и электродвигатель ДИД-0,5ТА останавливается. Статор сельсин-датчика гироагрегата электрически связан со статором сельсин-приемника указателя УГР-4УК. Согласование следящей системы гироагрегат —указатель УГР-4УК происходит аналогично.
Для быстрого согласования системы по магнитному курсу необходимо нажать переключатель «ЗК» на пульте управления ПУ-26 до упора в любую сторону. При этом напряжение + 27 В со второго контакта этого переключателя подается на реле гироагрегата. Реле срабатывает и подключает управляющую обмотку двигателя к выходу усилителя АС-1. При наличии рассогласования в следящей системе двигатель ДИД-0,5ТА будет разворачивать статор сельсин-датчик а с большой скоростью до согласованного положения.
При отпускании переключателя «ЗК» обмотка реле гироагрегата обесточивается и система переходит в режим коррекции по магнитному курсу с нормальной скоростью согласования.
Режим гирополукомпаса. Режим работы курсовой системы, при котором система выдает ортодромический курс самолета, контролируемый по сигналам индукционного датчика, называется режимом гирополукомпаса. Режим ГПК является основным режимом работы курсовой системы. В режиме ГПК решается задача по определению условного или ортодромического курса следования самолета.
Для включения режима ГПК необходимо переключатель режимов работы на пульте управления ПУ-26 (см. рис. 46) установить в положение «ГПК». В режиме ГПК точность выдачи курса курсовым гироскопом гироагрегата (предварительно откорректированным по датчику) зависит от собственного ухода главной оси гироскопа в азимуте и от точности ввода в гироскоп широтных поправок, устанавливаемых в зависимости от широты места полета.
Уход главной оси гироскопа в азимуте (из-за трения, несбалансированности трех осей гироскопа и других факторов) при работе курсовой системы в режиме ГПК в нормальных условиях не должен превышать 1° в течение 30 мин полета. При длительных полетах в режиме ГПК уходы гироскопа накапливаются и могут достичь недопустимых значений, в связи с чем необходима эпизодическая корректировка показаний гироагре-гата.
Для корректировки показаний гироагрегата в курсовой системе используется индукционный датчик ИД-3. Как известно, курсовому гироскопу даже при идеальном сохранении постоянства направления главной оси гироскопа в мировом пространстве свойствен «кажущийся» уход оси гироскопа, вызываемый вращением Земли. Этот «кажущийся» уход оси гироскопа равен вертикальной составляющей угловой скорости вращения Земли и поэтому зависит от широты места. Для устранения погрешностей гироагрегата в курсовой системе предусмотрена широтная коррекция.
При установлении широтного потенциометра (см. рис. 46) на значение широты места напряжение с него, пропорциональное «кажущемуся» уходу гиррскопа на данной широте, поступает на управляющую обмотку азимутального мотора-корректора. В последнем возникает момент силы, который принуждает гироскоп следовать с определенной точностью за вращением Земли.
При выполнении самолетом длительных виражей и разворотов могут возникать ошибки в указателе из-за негоризонтального положения индукционного датчика. Для отключения горизонтальной и азимутальной коррекции при разворотах служит выключатель коррекции ВК-53РШ (см. рис. 35).
Кроме основных режимов, курсовая система имеет вспомогательные режимы: пуска, автоматического согласования и контроля. Режим пуска обеспечивает автоматическое согласование
системы по магнитному (стояночному) курсу независимо от того, в каком положении находится переключатель режимов на пульте управления. В режиме автоматического согласования включается устройство быстрого согласования при установке переключателя режимов из положения «ГПК» в положение «МК». Режим контроля осуществляется в режиме МК и обеспечивает быструю и эффективную проверку курсовой системы как перед полетом, так и во время полета.
Основные технические данные:
курсовая система ГМК-1А питается от бортовой сети постоянного тока напряжением 27±2,7 В и от сети трехфазного тока напряжением 36±1,8 В и частотой 400±8 Гц;
потребляемая мощность по постоянному току 25 Вт, по переменному току 60 В.А;
погрешность выдачи сигналов магнитного курса не более ±1,5°;
погрешность от ухода оси гироскопа гироагрегата ГА-6 в азимуте при его работе в режиме ГПК за 1 ч работы в нормальных условиях не более ±2,5° и в условиях окружающей температуры от —60 до +50° С — не более ±3,5°;
дистанционная погрешность при выдаче углов отклонения в азимуте с сельсин-датчика гироагрегата ГА-6 не более ±0,6°;
погрешность определения курсовых углов радиостанции не более ±2,5°;
время готовности к работе в режиме МК не более 3 мин; в режиме ГПК не более 5 мин.
Проверка работоспособности курсовой системы перед полетом выполняется следующим образом:
включить автоматы защиты сети с надписью «ГМК» и «ПТ-200Ц» на правом злектрощитке;
на пульте управления ПУ-26 (см. рис. 46) переключатель широт «Сев.-Южн.» установить в положение «Сев.» при полете в северных широтах, а широтный потенциометр—на широту исходного пункта маршрута. На коррекциионном механизме КМ-8 отметчик магнитного склонения установить на «0». Через 3 мин с момента включения в режиме МК и через 5 мин в режиме ГПК курсовая система приходит в состояние готовности;
установить переключатель режимов в положение «МК», нажимной переключатель «0—контр.— 300» — в положение «0». Коррекционный механизм КМ-8 и указатель УГР-4УК должны отработать угол рассогласования и установиться на курс 0±10°. Переключатель «0 —контр.— 300» установить в положение «300». Коррекционный механизм КМ-8 и указатель УГР-4УК должны показать 300°±10°. При положении переключателя «0 — контр.— 300» на отметках «0» или «300» должна гореть лампа сигнализации «Завал ГА»;
установить переключатель «0 — контр.— 300» в среднее положение. При этом коррекционный механизм КМ-8 должен отработать угол рассогласования и установиться по магнитному стояночному курсу самолета;
установить переключатель «ЗК» в любое крайнее положение указателя. УГР-4УК должен с большой скоростью отработать угол рассогласования и показать магнитный стояночный курс самолета;
установить переключатель режимов в положение «ГПК», переключатель «ЗК»—в левое крайнее положение. При этом указатель УГР-4УК должен отработать курс в сторону увеличения показаний. Установить переключатель «ЗК» в крайнее правое положение. Указатель УГР-4УК должен отработать курс в сторону уменьшения показаний;
установить переключатель режимов в положение «МК». Произойдет быстрое автоматическое согласование, и указатель УГР-4УК покажет стояночный магнитный курс.
Проверка работоспособности системы ГМК-1А в полете производится в режиме МК путем отработки контрольных курсов «0 и 300°». Для проверки ГМК-1А в режиме ГПК:
установить переключатель режимов в положение «МК»; согласовать систему по магнитному курсу с помощью переключателя «ЗК» на пульте управления;
установить переключатель режимов в положение ГПК и произвести отсчет курса по шкале указателя УГР-4УК; через 30 мин установившегося полета по заданному курсу произвести отсчет курса по шкале указателя. Разность между первым и вторым отсчетом курса не должна превышать ±1,25° при нормальной температуре и ±1,75° при температуре, отличной от нормальной. После выполнения разворотов систему необходимо согласовать по магнитному курсу.
Работа с системой в полете (т. е. установка самолета на курс следования, изменение направления и выполнение полета) производится в соответствии с действующими руководствами и наставлениями. Наиболее рациональный режим работы курсовой системы, обеспечивающий наибольшую точность выдерживания курса на всех этапах полета и полет по наикратчайшему расстоянию — это режим ГПК, который является основным. Режим МК является вспомогательным и служит для периодической корректировки уходов главной оси гироскопа гироагрегата ГА-6 курсовой системы в заранее намеченных точках корекции маршрута.
Магнитный курс читается по внутренней шкале против верхнего двойного треугольного индекса (см. рис. 41). Магнитный пеленг радиостанции МПР — это угол, образованный направлением северного магнитного меридиана места самолета и направлением на радиостанцию; читается по внутренней шкале против острого конца стрелки АРК. Магнитный пеленг самолета МПС — это угол, образованный направлением северного магнитного меридиана места самолета и направлением от радиостанции на самолет; читается по внутренней шкале против тупого конца стрелки АРК.
Курсовой угол радиостанции КУР — это угол, образованный продольной осью самолета и направлением на радиостанцию; читается по внешней шкале против острого конца стрелки АРК. Для выхода самолета на заданный курс необходимо установить с помощью кремальеры стрелку курсозадатчика на нужное деление шкалы и разворотом самолета добиться совмещения стрелки курсозадатчика с треугольным индексом.
Основные неисправности.После включения питания коррек-ционный механизм и указатель УГР-4УК не согласуются по стояночному магнитному курсу. Лампа «Завал ГА» не светится при положении переключателя «0 — контр.— 300» на отметках «0 или 300». Причины могут быть следующие:
перегорели предохранители в цепи питания постоянным током — необходимо их заменить;
перегорели предохранители в цепи питания переменным током — тоже заменить;
при положении переключателя «0 — контр.— 300» на отметке «0» и «300» лампа сигнализатора не светится. Причина: перегорела лампа сигнализатора — надо заменить ее;
не светится лампа подсвета пульта. Причина: перегорела лампа подсвета.
Все неисправности устраняются только на земле.
Дата добавления: 2015-04-19; просмотров: 5818;