Индуктивные преобразователи. Принцип действия индуктивных преобразователей основан на изменении индуктивности системы под воздействием входной величины (перемещения
Принцип действия индуктивных преобразователей основан на изменении индуктивности системы под воздействием входной величины (перемещения, усилия). Индуктивность электромагнитной системы L определяется отношением числа потокосцеплений ∑Фιωι к вызвавшему их току I:
L = 1/I (∑Фιωι), (7)
где Ф – магнитный поток, Вб;
ω – число витков;
ι – номер обмотки.
Индуктивные преобразователипредставляют собой катушку индуктивности, полное сопротивление которой может меняться при взаимном относительном перемещении. Входной величиной индуктивного преобразователя является перемещение, выходной – индуктивность.
L = f (Х) – функция преобразования индуктивного преобразователя.
Индуктивные датчики делятся:
а) на датчики с переменным числом витков ω;
б) датчики с магнитной проницаемостью, изменяемой с помощью деформаций (магнитоупругие датчики);
в) датчики с переменным сопротивлением воздушного зазора Rδ;
г) датчики с сопротивлением магнитопровода, изменяемым с помощью подмагничивания постоянным магнитным потоком;
д) датчики с реактивным магнитным сопротивлением, изменяемым с помощью перемещения экрана или короткозамкнутого витка.
Индуктивный преобразователь (рис. 4.1) основан на изменении индуктивности обмотки 1 электромагнитного дросселя в зависимости от воздушного зазора δ между сердечником 2 и якорем 3. Здесь входным воздействием является перемещение якоря 3, а выходной величиной – индуктивность L, или выходное сопротивление х = ω · L :
L = W2/ (Rм + Rмв) = W2/ (Rм +2δ /μ0 · Sв), (8)
где W – число витков обмотки катушки;
Rм – магнитное сопротивление воздушного зазора (μ0 - магнитная проницаемость воздуха);
ω – частота переменного тока.
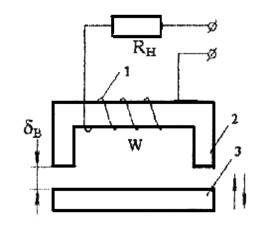
Рис. 4.1. Схема индуктивного преобразователя
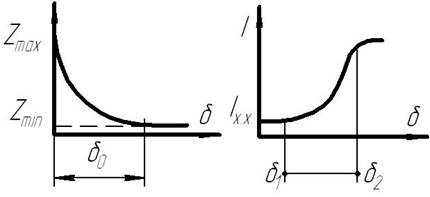
Линейный участок с начальным зазором δ0 (рис. 4.2.) ограничен значением Δδ, равным (0,1 – 0,15)δ0. Относительное изменение сопротивления из–за наличия активного сопротивления обмотки, потока утечки и магнитного сопротивления магнитопровода в 2 – 5 раз меньше относительного изменения зазора.
На практике обычно измеряют не индуктивность и сопротивление, а ток, протекающий по катушке (рис. 4.2, б), который равен I = U / ωL = U2δ/ ω2 μ0 S w.
а) б)
Рис. 4.2. Графики зависимости:
а) зависимость сопротивления от воздушного зазора;
б) зависимость тока от воздушного зазора
Достоинства: простота конструкции, дешевизна, отсутствие скользящего контакта, возможность получения большой выходной мощности (до 5 В·А), возможность работы от промышленной сети с частотой 50 Гц. Недостатки: небольшой участок линейности выходной величины, наличие тока холостого хода, температурная погрешность, неточное изготовление обмоток, не всегда правильный выбор материалов.
На практике, в виду своих недостатков, одиночный индуктивный преобразователь применяется очень редко, в основном используется дифференциальный индуктивный преобразователь.
Дата добавления: 2015-03-03; просмотров: 1971;