Оптико-механические магнитометры
Приборы данного типа много десятков лет были на вооружении советских геофизиков, все наземные наблюдения до середины 70-х гг. прошлого столетия в основном были выполнены приборами этого класса. Они просты в обращении, не требуют дорогого технического обслуживания. Однако точность магнитной съемки, выполненной такими магнитометрами, не превышает 10-15 нТл. В литературе эти приборы чаще всего называют оптико-механическими, стрелочными и магнитными весами /1,2/.
В основу действия приборов положен принцип работы весов. Приборы просты в производстве. Детально разработана теория их действия, которая заслуживает внимания исследователей при последующих разработках магнитных датчиков и дает понимание смысла измерения элементов земного магнетизма.
3.3.1. Принцип работы магнитных весов
Основу конструкции датчика-стрелки магнитометра составляют две магнитные металлические пластины ромбической формы, соединенные между собой кубическим каркасом, через который проходит кварцевая треугольная призма, нижнее ребро ее служит осью вращения и наклона магнитов (рис. 3.1).
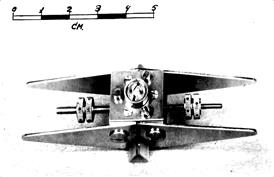 |
Рис. 3.1. Внешний вид датчика-стрелки магнитометра М-2
При изменении окружающего магнитного поля система принимает то или иное положение относительно нижнего ребра призмы. Угол наклона системы в вертикальной плоскости отражает изменение вертикальной составляющей напряженности магнитного поля. Измерение, основанное на принципе магнитных весов, показано на рис. 3.2.
Рассмотрим теорию принципа работы магнитных весов. Металлическую пластину, изготовленную из магнитного материала, можно представить магнитом, который обладает двумя магнитными фиктивными массами m и –m, расположенными на расстоянии L. В момент измерения магнит наклонен относительно горизонта на угол i. Равновесие системы наступает при уравновешивании моментов вращения, вызванного действием земного магнитного поля, и момента силы тяжести.
Уравнение равновесия приобретет вид
Z m L cos i = P d cos (b - i), (3.3)
 m m
 о i о i
   горизонт
β горизонт
β
 -m
Р -m
Р
|
| Рис. 3.2. К выводу рабочего уравнения магнитных весов |
где Z – вертикальная составляющая напряженности магнитного поля, Р – вес системы, d- плечо, расстояние от оси вращения до центра силы тяжести системы, b - угол между осью магнита и направлением плеча d.
Разложив косинус разности двух углов и заменив магнитный момент M = m L, получим уравнение равновесия магнитных весов
Z M cos i = P d cos b cos i+ P d sin b sin i.
Величину Z найдем так:
Z = P d cos b / M + P d sin b tg i / M.
Полевые измерения магнитометром начинаются с наблюдений на контрольном пункте (0), для которого величина вертикальной составляющей определяется по формуле
Z (0) = P d cos b / M + P d sin b tg i (0) / M. (3.4)
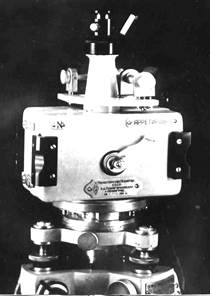 |
Рис. 3.3. Внешний вид магнитометра М-2
В каждом последующем пункте (1) наблюдения величина вертикальной составляющей напряженности магнитного поля будет равна
Z (1) = P d cos b / M + P d sin b tg i (1) / M. (3.5)
Изменение угла наклона магнитной системы служит мерой изменения магнитной индукции. Приращение вертикальной составляющей в пункте наблюдения (1) относительно контрольного измерения Z (0) опишется уравнением
DZ = Z (1) – Z (0) = P d sin b ( tg i (1) – tg I (0) ) / M. (3.6)
Тангенс угла наклона магнитной системы tg i можно определить по показаниям прибора (шкале n) и постоянной оптической трубы r:
tg i = n / r,
тогда D Z будет зависеть от параметров магнитной системы и показаний прибора:
DZ = P d sin b (n (1) – n (0)) /M r. (3.7)
Параметры магнита определяют чувствительность прибора e – цену деления прибора,
e= P d sin b / M r,
которая во время его настройки регулируется путем изменения длины плеча r. После введения цены деления в формулу (3.7) получим рабочее уравнение для приборов, действующих по принципу весов:
 , (3.8)
, (3.8)
где ni - отсчет по прибору на любом пункте профиля, n0 – отсчет по прибору на КП. По принципу весов работает магнитометр М-2, внешний вид его представлен на рис. 3.3.
3.3.2. Торсионные магнитометры
Долгое время удобными приборами считались различные модификации вертикальных весов Шмидта. В начале 50-х гг. в конструкциях этих приборов ножевидная опора была заменена подвесом на растянутых кварцевых нитях /2, 8,12/
Такие торсионные магнитометры на горизонтальной растяжке служили отечественной магнитометрии с начала 60-х до конца 90-х гг. За это время были разработаны приборы марок М-18, М-23, М-27 и М-27М, предназначенные для измерения компенсационным методом приращений вертикальной составляющей магнитной индукции Земли. Чувствительным элементом магнитометров является подвижный магнит-индикатор, вращающийся на горизонтальной нити-растяжке. Его применение и усовершенствование системы ступенчатой компенсации поля позволило уменьшить цену деления отсчетного устройства до 10 нТл/дел., а смещение нуль-пункта – до 1 нТл/ч. Однако к значительному повышению производительности измерений разработка магнитометров с подвесами на растянутых нитях не привела.
Рассмотрим особенности работы магнитометров на горизонтальных подвесках (рис.3.4).
Чувствительным элементом магнитометра является подвижный постоянный магнит 10, вращающийся на горизонтальной металлической нити 8, подвешенной на стойке 12. На верхней части магнита прикреплено зеркало 9. Подвижный магнит 10 под воздействием вращающего момента, создаваемого аномальным магнитным полем, отклоняется на угол, пропорциональный величине изменения ΔZ.
Система уравновешивается вращающими моментами полей компенсационных магнитов и моментом кручения металлической нити. Отчетное устройство состоит из автоколлимационной зрительной трубки и шкалы 15. Трубка снабжена окуляром 2 и объективами 7 и 5. Зеркало 16 и призма 6 служат для подсветки шкалы, а зеркало 1 и призма 3 подсвечивают подвижный индекс.
Плавная компенсация магнитного поля осуществляется измерительным магнитом 14, а диапазонная – магнитом 11, укрепленным на конце биметаллической пластины 13, второй конец которой связан с узлом ступенчатой компенсации. Прибор обладает ступенями компенсации: 14 –– в сторону увеличения и 14 ступеней – в сторону уменьшения поля.
При компенсации поля ΔZ магнитная ось подвижного магнита выводится в горизонтальное положение и, следовательно, горизонтальная составляющая Н не влияет на показания магнитометра. Внешний вид магнитометра М-27 представлен на рис. 3.5.
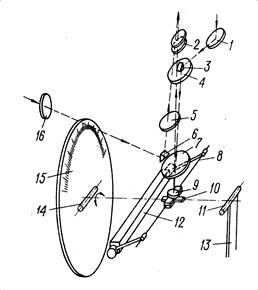 |
Рис. 3.4. Основные узлы торсионного магнитометра
В магнитометрах с горизонтальной крутильной нитью кроме вращающих моментов со стороны действия М Z cos i и P d cos i действуют: крутильный момент упругой нити τ (θ + i), моменты сил компенсирующих магнитов, которые при малых углах i примем пропорциональными косинусу угла их поворота α от вертикали в плоскости xoz.
Уравнение равновесия системы при принятых условиях будет следующим:
M Z cos i – M H cos A sin I –
– M L cos α – P d cos i + τ (θ + i) = 0, (3.9)
где М – магнитный момент стрелки; i – угол отклонения стрелки от горизонтальной плоскости; А – азимут оси магнитной стрелки; L cos α – поле, создаваемое компенсационным магнитом; α – угол между магнитной осью компенсирующего магнита и вертикалью; Р – вес магнитной стрелки; d – расстояние от центра тяжести подвижного магнита до оси вращения; τ – коэффициент кручения крутильной нити; θ – угол начального закручивания нити.
В положении полной компенсации (i = 0) влияние горизонтальной составляющей магнитного поля не сказывается на положении равновесия системы при любой азимутальной ориентировке прибора, следовательно,
М Z – M L cos α – P d + τθ = 0.
Написав уравнения для двух соседних пунктов, получим зависимость изменения ΔZ от угла наклона фиксации компенсирующих магнитов.

Рис. 3.5. Работа с магнитометром М- 27М
Оптико-механические приборы, магниточувствительным элементом которых является магнитная стрелка, отклоняющаяся под действием магнитного поля Земли, служат для измерения относительных приращений компонент магнитного поля. Чувствительность приборов достигает 5 – 10 нТл, она значительно зависит от внешних факторов, упругие характеристики магнитной системы нестабильны.
В настоящее время этот тип приборов не выпускается, он имеет ограниченное применение.
Дата добавления: 2015-02-16; просмотров: 3624;