Вопрс №27. Аппаратные и цифровые регуляторы локальных САР
Регуляторы Р25(аппаратно-технический комплекс Контур-1)
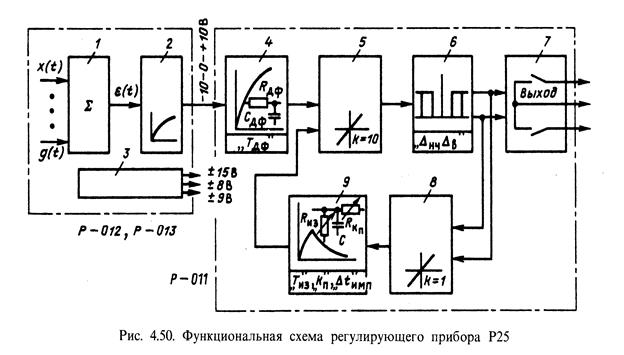
Содержит измерительный блок Р – 012 или Р – 013 и регулирующий блок Р – 011, одинаковый для всех модификаций приборов.
Измерительный блок включает в себя сумматор 1, нормирующий операционный усилитель 2, построенный по интегральной микросхеме (ИМС), и стабилизированный источником напряжения постоянного тока 3.
В сумматоре измерительного блока Р – 012 суммируются сигналы от датчиков и сигнал от моста (задатчик – корректор). Суммарный сигнал выпрямляется, фильтруется и поступает на вход нормирующего операционного усилителя.
Электронный блок Р – 011 предназначен для формирования закона регулирования и коммутации в выходных цепей. Он включает в себя демпфер 4, суммирующий усилитель 5, схему сравнения 6, выходные ключи 7, операционный усилитель обратной связи 8, инерционное звено блока отрицательной обратной связи 9. Сигнал рассогласования с измерительного блока поступает на демпфер 4, представляющий собой RC – звено с регулируемой постоянной времени демпфирования Тдф. С выхода демпфера сигнал поступает на вход суммирующего усилителя 5, выполненного на ИМС, где суммируется с сигналом обратной связи, поступающим с выхода звена 10.
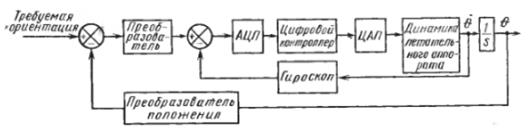
Как известно, наиболее важным функциональным узлом систем автоматического управления являются регуляторы, которые реализуются в микропроцессорной САУ программным путем и являются (из-за наличия в системе квантования по времени и уровню) цифровыми регуляторами.
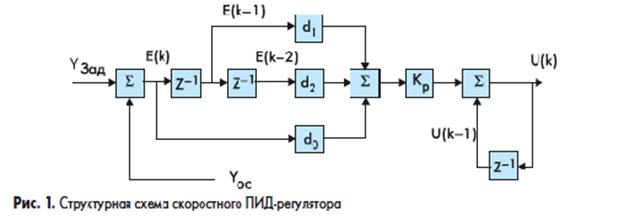
Регуляторы разделяют на две группы: параметрически оптимизируемые и структурно оптимизируемые.
К параметрическим оптимизируемым регуляторам относятся классические виды регуляторов типа П-регулятор, ПИ-регулятор, ПИД-регулятор и их модификации. К структурно оптимизируемым - компенсационные регуляторы и регуляторы состояния.
Компенсационные регуляторы проектируются с таким расчетом, чтобы снизить влияние некоторых параметров объекта на качество управления. При этом различают следующие модификации регуляторов этого типа:
- компенсатор - ликвидирует воздействие объекта в особых точках передаточной функции (нули и полюса);
- апериодический регулятор - обеспечивает окончание переходного процесса при ступенчатом возмущении за заданное время;
- регулятор-предиктор - регулятор с предсказанием реакции; модель объекта включается в обратную связь регулятора;
- регулятор с минимальной дисперсией - применяется в стохастических системах; минимизирует дисперсию значений регулируемой переменной.
Рассмотренные выше регуляторы называют регуляторами "входа-выхода", так как они контролируют входную и выходную величины и вырабатывают управляющее воздействие согласно определенному закону управления.
Дата добавления: 2015-02-05; просмотров: 1801;