Глава 9. ЦИФРОВЫЕ ВОЛЬТМЕТРЫ
Среди цифровых вольтметров (ЦВ) напряжения постоянного тока наиболее широкое распространение получили интегрирующие вольтметры. Одна из причин этого заключается в том, что на измеряемое постоянное напряжение обычно накладывается переменное напряжение помехи. Как уже отмечалось, самой распространенной помехой является переменное напряжение частоты промышленной сети. Реальная временная диаграмма напряжения на входных зажимах вольтметра, подсоединенного к источнику измеряемого постоянного напряжения Ux, показана на рис. 7.19. Для снижения действия помех на входе ЦИП иногда ставят фильтр нижних частот. Этот способ связан со снижением метрологических характеристик, сопротивления входа, быстродействия.
Рис. 7.19. Диаграмма напряжения на входе ЦИВ
Цифровые интегрирующие вольтметры (ЦИВ), показывающие среднее значение входного напряжения за некоторый фиксированный интервал времени Uxcv, позволяют получить результат без учета действия помех. Действительно, показания ЦИВ определяются следующим выражением:
где Unmax — амплитудное значение напряжения помехи; ω — угловая частота напряжения помехи.
Среди ЦИВ наиболее распространены вольтметры с двухтактным интегрированием. В ЦИВ с двухтактным интегрированием значение измеряемого напряжения сначала преобразуется во временной интервал, который уже непосредственно кодируется методом последовательного счета. Упрощенная структурная схема и временные диаграммы, поясняющие работу такого ЦИВ, приведены на рис. 7.20.
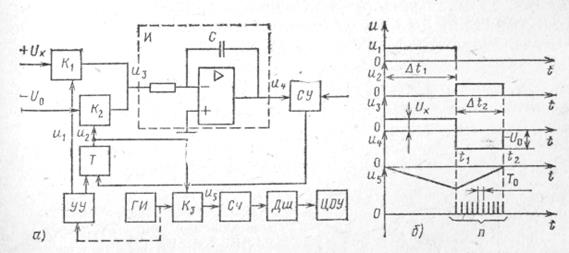
Рис. 7.20. Структурная схема (а) и временные диаграммы работы (б) ЦИВ с двухтактным интегрированием
В исходном состоянии аналоговые ключи К1 и К2, a также логический ключ К3 находятся в разомкнутом состоянии. В начале цикла измерения выходным сигналом U1 устройства управления УУ ключ K1 переводится в со стояние «замкнуто» и находится в этом состоянии в течение фиксированного интервала времени Через замкнутый К1 на вход интегратора И, построенного на операционном усилителе, в продолжение Δt1подается измеряемое напряжение Ux. Интервал Δt1 является первым тактом интегрирования. При положительной полярности Ux напряжение на выходе интегратора И во времяпервого такта линейно падает в соответствии с выражением
По окончании первого такта управляющий сигнал U1 на первом выходе устройства управления УУ принимает значение логического 0 и ключ K1 размыкается, одновременно на другом выходе УУ появляется сигнал, устанавливающий триггер Т в состояние 1. Выходным напряжением триггера U2 замыкаются ключи К2 и Кз Через замкнутый ключ К.2 на вход интегратора И поступает постоянное опорное напряжение U0, полярность которого противоположна полярности Ux. Интегрирование U0 составляет второй такт интегрирования, в течение которого выходное напряжение интегратора И линейно возрастает, а через открытый логический ключ Кз на счетчик СЧ проходят импульсы U5 генератора стабильной частоты ГИ. В момент, когда выходное напряжение интегратора U4 достигнет нулевого уровня, срабатывает сравнивающее устройство СУ. Его сигналом триггер сбрасывается в состояние 0, в результате чего размыкаются ключи K2 и. K3- Длительность второго такта определяется из условия:
откуда получаем

Число импульсов генератора ГИ, зафиксированное счетчиком СЧ, равно

Длительность Δt1 выбирается равной или кратной периоду наиболее часто встречающейся помехи — напряжению промышленной сети: Δt1= 20m, мс (т — положительное, целое число). За счет этого обеспечивается значение коэффициента подавления помехи нормального вида K=>40 дБ для помех сетевого напряжения при колебаниях частоты помехи на ± 1 % по отношению к номинальному значению 50 Гц.
Интервал Δt1 в ЦИВ с двухтактным интегрированием обычно формируется с помощью входящего в состав устройства УУ триггерного делителя частоты, на вход которого поступают импульсы с выхода генератора ГИ (штриховая линия связи У У и Г И на рис. 7.20, а). Основными составляющими погрешности ЦИВ с двухтактным интегрированием являются погрешности дискретности квантования Δt2, от нестабильности опорного напряжения U0, от влияния остаточных параметров аналоговых ключей, из-за неточного выполнения операции интегрирования реальным интегратором.
Цифровые интегрирующие вольтметры с двухтактным интегрированием, выпускаемые промышленностью, и комбинированные приборы на их основе обычно являются многопредельными, допускают ручной и автоматический выбор пределов, характеризуются высокими точностью, чувствительностью и разрешающей способностью. Отсчетное устройство таких ЦИВ имеет шесть-семь знаков.
Помимо ЦИВ для измерения напряжения постоянного тока выпускаются также цифровые вольтметры, предназначенные для измерения мгновенных значений входного напряжения. Такие вольтметры не защищены от действия помех и не могут обеспечить высокой чувствительности и разрешающей способности, но в некоторых случаях их характеристики удовлетворяют потребителей. Среди неинтегрирующих ЦВ практическое распространение получили ЦВ с время- импульсным преобразованием и ЦВ поразрядного уравновешивания.
В ЦВ с время- импульсным преобразованием значение измеряемого напряжения Ux предварительно преобразуется в интервал времени Δt, который непосредственно кодируется методом последовательного счета. Преобразование Ux в Δt происходит посредством сравнения Ux с линейно изменяющимся напряжением u(t). Упрощенная структурная схема ЦВ и временные диаграммы его работы показаны на рис. 7:21. Как видно из структурной схемы, измеряемое напряжение Ux подается на один из входов сравнивающего устройства СУ, а другой вход СУ соединен с выходом генератора линейно изменяющегося напряжения ГЛИН.
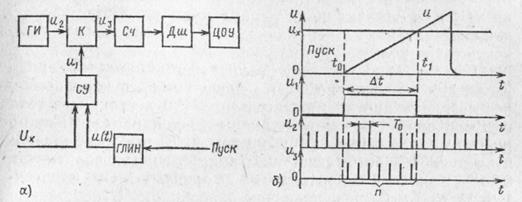
Рис. 7.21. Структурная схема (а) и временные диаграммы работы (б) время-импульсного вольтметра
Генератор линейно изменяющегося напряжения обычно представляет собой интегратор, подключаемый на заданный интервал времени к источнику постоянного опорного напряжения. В начальный момент t0 цикла измерения происходит запуск ГЛИН. Поскольку непосредственно после запуска ГЛИН Ux>u(t), на выходе сравнивающего устройства СУ появляется скачок напряжения U1, равный логической 1. Этим напряжением открывается логический ключ K, через который на счетчик Сч начинают поступать импульсы с выхода генератора импульсов стабильной частоты ГИ. В момент t1, когда u(t) станет равным Ux, напряжение U1 на выходе СУ скачком изменяется до логического 0. За счет этого K размыкается, прекращая подачу импульсов на Сч. Интервал времени Δt, в течение которого на выходе СУ поддерживается напряжение, равное логической 1, пропорционален Uх:
Δt = Ux/c,
где с — коэффициент, характеризующий скорость изменения u(t). За Δtна вход Сч пройдет п импульсов генератора ГИ

Таким образом, п оказывается пропорциональным Ux. При условии f0/c=10m, где m —любое целое число, можно, выбрав m, получить на ЦОУ значение Ux в требуемых единицах измерения (вольты, милливольты и т.д.).
Основные составляющие погрешности прибора — погрешность дискретности квантования Δt и погрешности от нестабильности То, нелинейности и нестабильности наклона U(t) и от наличия порога срабатывания СУ. Две последние составляющие и ограничивают главным образом точность таких вольтметров на уровне 0,1 %.
Упрощенная структурная схема ЦВ поразрядного уравновешивания и временные диаграммы, поясняющие его работу, приведены на рис. 7.22. Схема содержит сравнивающее устройство СУ, на которое подаются измеряемое напряжение Ux и компенсирующее напряжение UK; генератор тактовых импульсов ГТИ, определяющий последовательность работы узлов ЦВ; устройство управления УУ, выходной код которого управляет ПКН —преобразователем кода в компенсирующее напряжение Us; дешифратор Дш кода ПКН и цифровое отсчетное устройство ЦОУ. Временные диаграммы рис. 7.22, б построены в предположении, что ПКН содержит две тетрады резисторов с весовыми коэффициентами сопротивлений 4-2-2-1, причем коммутация резисторов старшей тетрады дает приращение UK в вольтах, а младшей — в десятых долях вольта.
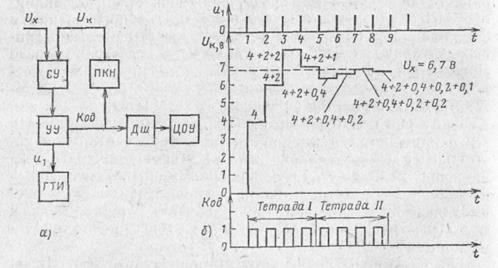
Рис. 7.22. Структурная схема (а) и временные диаграммы работы (б) ЦВ поразрядного уравновешивания
Рассмотрим работу ЦВ для Ux = 6,7 В. В каждом цикле измерения при поступлении первого импульса от ГТИ на выходе УУ вырабатывается кодовый сигнал 1, замыкающий в ПКН резистор старшей тетрады с первым весовым коэффициентом 4. При этом на выходе ПКН устанавливается значение UKl, равное 4 В. Поскольку UX>UM, выходной сигнал СУ после первого импульса ГТИ равен логической 1, за счет чего в УУ вводится запрет на сброс в ноль кодового сигнала, управляющего первым резистором старшей тетрады ПКН. С приходом второго импульса ГТИ на выходе УУ появляется кодовый сигнал 1 во втором разряде старшей тетрады. На выходе ПКН устанавливается напряжение Uк2=4 + 2=6 В. Поскольку Ux остается больше UK2, то выходной сигнал СУ вводит запрет на сброс в ноль кодового сигнала 1 и во втором разряде старшей тетрады. С приходом третьего импульса ГТИ на выходе ПКН устанавливается Uкз=8 В. Поскольку теперь Ux<Uк3, выходной сигнал СУ равен 0, за счет чего дается разрешение в УУ на сброс в 0 кодового сигнала в третьем разряде старшей тетрады. Четвертым, импульсом ГТИ этот кодовый сигнал сбрасывается в 0, а в последнем разряде старшей тетрады устанавливается кодовый сигнал 1. На выходе ПКН устанавливается UK4=7 В.
Описанный алгоритм поразрядного уравновешивания Ux продолжается до тех пор, пока не будет определено состояние самого младшего разряда. Временная диаграмма на рис. 7.22, б показывает значения кодовых сигналов в каждом разряде тетрад в конце цикла измерения: для рассматриваемого примера эти значения образуют код 11001101. Полученный код преобразуется в десятичный и выводится на ЦОУ.
Основными составляющими погрешности такого ЦВ являются: погрешности дискретности квантования Ux, ПКН и от наличия порога срабатывания СУ. Принципиально погрешность ЦВ поразрядного уравновешивания можно снизить до 0,001 % при сохранении высокого быстродействия. Однако на входе таких ЦВ для подавления помех нормального вида приходится использовать входные фильтры, которые резко снижают быстродействие этих приборов. В настоящее время ЦВ поразрядного уравновешивания вытесняются интегрирующими вольтметрами, но метод поразрядного уравновешивания сохраняет свое значение для построения быстродействующих АЦП автономного применения.
При построении ЦВ с повышенной точностью и разрешающей способностью иногда применяется разделение процесса аналого-цифрового преобразования на два этапа. На первом этапе производится преобразование Ux в код, который заносится в т старших разрядов цифрового индикатора. Этот код затем подвергается точному обратному преобразованию с помощью ПКН. Выделяется разностное напряжение ΔU,между Uх и выходным напряжением ПКН. На втором такте производится преобразование усиленного значения kΔU в код, который заносится в m2 младших разрядов цифрового индикатора. Результат измерения выражается суммарным кодом, состоящим из т1 + т2 разрядов. Для преобразования на каждом из этапов могут быть применены одинаковые или разные методы.
9.1 Помехи общего и нормального вида
Помехи, действующие на цифровые измерительные устройства (ЦИУ), делятся на помехи нормального вида и помехи общего вида. Помехи нормального вида (например, наводки на соединительные провода) — помехи, эквивалентный генератор которых U'n включается последовательно с источником измеряемого напряжения (рис. 8-10). Помеха общего вида возникает из-за разности потенциалов между источником измеряемого напряжения Ux и точкой заземления прибора (эквивалентный генератор Uп" с внутренним сопротивлением Ri, на рис. 10.10). Ток от источника помехи общего вида, протекая по Rвх создает падение напряжения — помеху нормального вида.
Для уменьшения действия помех нормального вида в виде переменного напряжения (главным образом, частотой 50 Гц) применяют фильтры или ЦИУ с принципом действия, включающим в себя интегрирование входного сигнала.
Для борьбы с помехами общего вида схему прибора и его конструкцию выбирают так, чтобы сопротивление контура для тока помехи через Rвх было максимальным. Это достигается, например, изолированием входной цепи прибора от корпуса прибора. Ослабление действия помех в цифровых вольтметрах постоянного тока характеризуют коэффициентом подавления помехи (в децибелах) K=20 lg ((Uп/ΔU), где Un — напряжение источника помехи нормального (Uп’) или общего (Uп" ) вида; ΔU — изменение показаний прибора под действием помехи нормального вида или падения напряжения на входном резисторе Rвх от действия помехи общего вида.
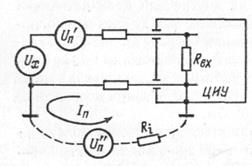
Рис. 10.10. Эквивалентные источники помех
Дата добавления: 2015-01-24; просмотров: 3887;