Способ пуска, регулирования и торможения двигателей постоянного тока
Пуск.В начальный момент пуска в ход якорь двигателя неподвижен и противо-эдс равна нулю (Е = 0). При непосредственном включении двигателя в сеть в обмотке якоря будет протекать чрезмерно большой ток Iпуск = U/Rя. Поэтому непосредственное включение в сеть допускается только для двигателей очень малой мощности, у которых падение напряжения в якоре представляет относительно большую величину и броски тока не столь велики. В машинах постоянного тока большой мощности падение напряжения в обмотке якоря при полной нагрузке составляет несколько процентов от номинального напряжения, т. е. IяRя = (0,02  0,1). Следовательно, пусковой ток в случае включения двигателя в сеть с номинальным напряжением во много раз превышает номинальный (Iпуск)
0,1). Следовательно, пусковой ток в случае включения двигателя в сеть с номинальным напряжением во много раз превышает номинальный (Iпуск)
Большой пусковой ток является опасным как для машины, так и для приемника механической энергии, находящегося на валу двигателя. При большом токе нагревается обмотка якоря машины и образуется интенсивное искрение под щетками, вследствие которого коллектор может выйти из строя. На валу двигателя создаются механические удары, так как при большом токе вращающий момент будет также большим. Для ограничения пускового тока используют пусковые реостаты, включаемые последовательно с якорем двигателя при пуске в ход. Пусковые реостаты представляют собой проулочные сопротивления, рассчитываемые на кратковременный режим работы, и выполняются ступенчатыми, что дает возможность изменять ток в якоре двигателя в процессе пуска его в ход. Схема двигателя параллельного возбуждения с пусковым реостатом показана на рис. 151. Пусковой реостат этого двигателя:
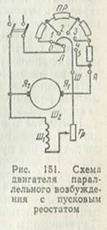
имеет три зажима, обозначаемые буквами Л, Я, Ш. Зажим Л соединен с движком реостата и подключается к одному из полюсов рубильника (к линии). Зажим Я соединяется с сопротивлением реостата и подключается к зажиму якоря Я. Зажим Ш соединен с металлической шиной, помещенной на реостате (шунт). Движок реостата скользит по этой шине так, что между ними имеется непрерывный контакт. К зажиму Ш через регулировочное сопротивление rр присоединяется обмотка возбуждения Ш1. Зажим якоря Я2 и обмотки возбуждения Ш2 соединены между собой перемычкой и подключены ко второму полюсу рубильника, включающее двигатель в сеть. При пуске в ход включается рубильник и движок реостата переводится на контакт 1, так что последовательно с якорем соединино полное сопротивление пускового реостата ПР, которое выбирается таким, чтобы наибольший ток при пуске в ход Iмакс не превышал номинальный ток более чем в 1,7—2,5 раза, т. е. Rп = U/Imax - Rя. При включении двигателя в сеть по обмотке возбуждения также протекает ток, образующий магнитный поток. В результате взаимодействия тока в якоре с магнитным полем полюсов создается пусковой момент.
Регулирование путем изменения напряжения.Примем RД=0,Φ=Φн=const,U=var. Так как в этом случае напряжение на якоре может отличаться от номинального, то механическая характеристика в относительных единицах запишется выражением несколько отличным от (2.13):ν=u−μ,(2.21)где u=U/Uн – относительное значение напряжения на якорной обмотке.
В соответствии с выражением (2.21) характеристики при регулировании скорости (μ=const) имеют вид (рис. 2.5). При построении характеристик в данном случае и далее предполагается реактивный характер момента на валу двигателя. Из уравнения (2.21) нетрудно найти диапазон изменения скорости ν∈[0,(1−μ)] при изменении регулирующей координаты в диапазоне u∈[μ,1]. Передаточный коэффициент регулирования kυ=Δυ/Δu=1 или, переходя к абсолютным величинам, получим: 1=ω/ω0×Uн/U.
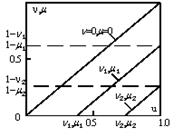
Рис. 2.5. Регулировочные характеристики при изменении напряжения на якоре
Отсюда kω=ω/U=ω0/Uн=1/(KΦ). (2.22)
Регулирование изменением сопротивления в цепи якоря.Примем U=Uн=const,Φ=Φн=const, а сопротивление якорной цепи представим соотношениемRяц=Rя+Rд.Подставим Rяц в уравнение механической характеристики (2.7) вместо Rя и получимω=Uн/(KΦн)−M×(Rя+Rд)/(KΦн)2.Запишем полученное уравнение механической характеристики в относительных единицах:
ν=1−(1+r)μ, (2.29)
где r=Rд/Rя – относительное значение добавочного сопротивления в цепи якоря. Если принять μ=const, то уравнение (2.29) является характеристикой регулирования скорости. Можно отметить, что это характеристика линейна и имеет вид (рис. 2.6.а).
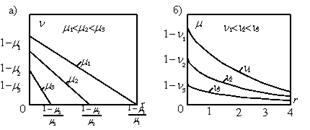 Рис. 2.6. Регулировочные характеристики при изменении сопротивления в цепи якоря
Рис. 2.6. Регулировочные характеристики при изменении сопротивления в цепи якоря
Диапазон изменения скорости ν∈[0,(1−μ)]. При этом регулирующий параметр должен изменяться в диапазоне r∈[(1−μ)/μ,0].
Передаточный коэффициент регулирования kυ=Δυ/Δr=−μ. (2.30)
Регулирование потоком возбуждения.Примем в уравнении (2.7) U=Uн,Φ=var, т.е поток может уменьшаться от номинального. Тогда, переходя к относительным единицам, получим: ν=1/f−μ/f2, (2.33)
где f=Φ/Φн – относительное значение потока. При регулировании скорости примем μ=const. Тогда выражение (2.33) можно считать регулировочной характеристикой, которая является существенно нелинейной. Общий вид регулировочных характеристик представлен на рис. 2.7.а. Из рисунка видно, что характеристика имеет перегиб. Максимальное значение скорости соответствует точке перегиба, определим, как и ранее, известным поиском экстремума функции, т.е из уравнения dν/df=0. В результате получим νm=1/(4μ) при значении регулирующего параметра fm=2μ.
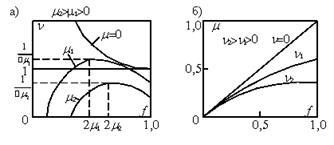
Рис. 2.7. Регулировочные характеристики при изменении потока
Для описания характеристики регулирования момента в (2.33) примем ν=const и перепишем уравнение в виде μ=f(1−fν).
Реверсирование двигателей. Из уравнения вращающего момента двигателя Мэм = kФIя вытекает, что реверсирование, т. е. изменение направления вращения якоря, может быть осуществлено изменением направления тока в обмотке возбуждения (потока Ф) или тока якоря.
Для реверсирования двигателя «на ходу» изменяют направление тока якоря (переключением якорных выводов), а обмотку возбуждения не переключают, так как она обладает большой индуктивностью и разрыв ее цепи с током недопустим. Реверсирование отключенного двигателя осуществляется и изменением направления тока в обмотке возбуждения (переключением ее выводов).
Дата добавления: 2015-03-23; просмотров: 2098;