Краткие теоретические сведения
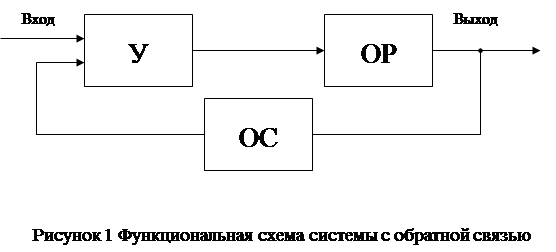
В САР широко применяются обратные связи. Обратные связи имеют место во всех системах в живых организмах. Обратная связь обеспечивает связь между выходом системы автоматического регулирования и ее входом и позволяет учитывать отклонения выходной величины от заданного значения и вносить необходимые коррективы в управляющее воздействие на входе системы (рисунок 1).
В САР различают внешнюю и внутренние (местные) обратные связи.
Обратные связи по характеру передачи воздействия делятся на жесткие и гибкие.
Жесткая обратная связь действует как в установившемся режиме, так и в переходном процессе.
Гибкая обратная связь действует только во время переходного процесса, а в установившемся режиме ее действие прекращается.
Применение гибкой обратной связи является частным случаем использования параллельного корректирующего звена.
Корректирующими называются устройства с легко изменяемыми параметрами и характеристиками, вводимые в состав САР для придания им требуемых динамических свойств — обеспечения устойчивости САР и улучшения показателей качества переходного процесса.
Если спроектированная САР оказалась неустойчивой, то она может быть сделана устойчивой или, как говорят, стабилизирована введением специальных корректирующих устройств, которые в этом случае обычно называют стабилизирующими устройствами.
САР делятся на структурно-устойчивые и структурно-неустойчивые.
Структурно-устойчивыми называются САР в том случае, если их можно сделать устойчивыми изменением численных значений их параметров (постоянных времени, коэффициентов усиления), не изменяя структурной схемы.
Структурно-неустойчивыми называются САР, которые никаким изменением их параметров нельзя сделать устойчивыми. Добиться устойчивости этих систем можно только изменением их структурной схемы.
Принципиальные схемы, конструкция и способы включения корректирующих устройств различны. Они зависят от принципиальной схемы и конструкции элементов САР и от того, какой дефект системы требуется исправить.
Корректирующие устройства по способу включения в систему автоматического регулирования делятся на последовательные и параллельные.
Последовательными называются корректирующие устройства, включаемые в главный контур системы регулирования последовательно с остальными звеньями системы.
В последовательном корректирующем устройстве могут быть местные параллельные обратные связи.
Последовательные корректирующие устройства служат для преобразования сигналов, пропорциональных отклонению регулируемой величины таким образом, что на выходе корректирующего устройства получается сигнал, пропорциональный отклонению регулируемой величины, а также сигналы, пропорциональные производным и интегралам от отклонения.
В общем случае выходная величина идеализированного последовательного корректирующего устройства
 (1)
(1)
равна сумме величин: пропорциональной входному сигналу, производной от входного сигнала и интегралу от входного сигнала.
В частных случаях корректирующее устройство может вводить в систему только производную первого и более высоких порядков или только интеграл с одинарным или двойным интегрированием.
Достоинством последовательных корректирующих устройств являются простота и дешевизна, так как в большинстве случаев они могут быть выполнены из пассивных четырехполюсников, содержащих емкости и активные сопротивления.
Недостатками последовательных корректирующих устройств являются:
1) высокая чувствительность к изменению параметров остальных звеньев системы, что выдвигает повышенные требования к стабильности параметров звеньев; 2) высокая чувствительность к помехам, накладывающимся на основной сигнал.
Последовательные корректирующие устройства применяются главным образом в маломощных устойчивых системах для улучшения качества переходных процессов, а также в САР сложных технологических объектов, в которых конструктивно нельзя применить параллельные корректирующие устройства.
Параллельными называются корректирующие устройства, включаемые параллельно одному или нескольким звеньям САР. Эти устройства представляют собой местные обратные связи. Такое соединение корректирующих устройств иначе называется встречно-параллельным. Корректирующие устройства, в которых воздействия передаются в том же направлении, что и в элементе основной цепи, вместе с элементами основной цепи следует относить к последовательным корректирующим устройствам.
Выбор параллельных корректирующих устройств сводится к определению характера и параметров обратной связи.
Обратные связи делятся на жесткие и гибкие, положительные и отрицательные. Все эти виды обратных связей могут применяться в качестве корректирующих устройств.
Рассмотрим влияние различных обратных связей на динамические свойства системы при различных способах их включения.
Жесткая обратная связь охватывает апериодическое звено.
обратной связи, имеет место уменьшение постоянной времени звена и его коэффициента усиления.
При положительной обратной связи качественных изменений апериодического звена не происходит, а увеличиваются постоянная времени звена и его коэффициент усиления, при этом апериодическое звено может становиться неустойчивым и ухудшать динамические свойства системы.
При отрицательной жесткой обратной связи качественных изменений апериодического звена не происходит, но увеличивается быстродействие системы, может повыситься ее устойчивость, но снижается точность регулирования в установившемся режиме.
Таким образом, введением в систему жестких отрицательных обратных связей, охватывающих апериодическое, колебательное или одно интегрирующее звено, можно повысить устойчивость системы и даже превратить неустойчивую систему в устойчивую. Однако вследствие того, что жесткая отрицательная обратная связь действует на систему в переходном и установившемся режимах, введение ее приводит к понижению коэффициента усиления системы и, следовательно, к снижению точности в установившемся режиме.
Гибкие обратные связи и их влияние на динамические свойства системы. Гибкие обратные связи отличаются тем, что они действуют в переходных режимах и не действуют в установившихся. При введении гибкой обратной связи на вход охваченного ею звена подается величина, пропорциональная скорости изменения выходной величины этого звена, т. е. производная от выходной величины этого звена.
Электрические гибкие обратные связи осуществляются с помощью дифференцирующих трансформаторов и цепей, содержащих емкости. Механические гибкие обратные связи выполняются обычно в виде масляного демпфера с пружиной.
Рассмотрим влияние гибкой обратной связи на динамические свойства САР. Предположим, что имеется одноконтурная САР, передаточная функция которой в разомкнутом состоянии
 (2)
(2)
где 
— передаточные функции отдельных последовательно соединенных звеньев.
Введем гибкую отрицательную обратную связь с передаточной функцией Wc(р), охватывающую одно из звеньев, например второе. Передаточная функция этого звена с учетом обратной связи
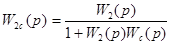 (3)
(3)
Подставив значение W2с(р) в выражение (1) вместо W2(р), получим передаточную функцию разомкнутой системы с местной обратной связью
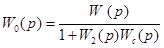 (4)
(4)
Если обратная связь охватывает несколько последовательно соединенных звеньев, то в знаменатель уравнения (4) вместо W2(p) следует подставить произведение передаточных функций звеньев, охваченных обратной связью.
Таким образом, введение гибкой обратной связи уменьшает модуль амплитудно-фазовой характеристики системы без обратной связи, что уменьшает динамическую точность и быстродействие системы и поворачивает его в положительном направлении (против часовой стрелки), что приводит к повышению устойчивости системы.
С увеличением частоты ω действие гибкой обратной связи уменьшается. В установившемся режиме действие гибкой обратной связи полностью прекращается.
Достоинства параллельных корректирующих устройств:
1. Стабильность характеристик системы повышается за счет звеньев, охваченных обратной связью, и поэтому требования к стабильности параметров этих звеньев могут быть менее жесткими, чем требования к неохваченным обратной связью звеньями.
2. Системы с параллельными корректирующими устройствами малочувствительны к помехам, накладывающимися на основной сигнал, пропорциональный отклонению регулируемой величины. Это объясняется тем, что вход обратной связи включен на выход охваченных обратной связью звеньев, которые выполняют функцию фильтра низких частот, снижающего уровень помех.
3. Применение параллельных корректирующих устройств не требует применения дополнительных усилителей, так как уровень мощности на выходе звеньев, охватываемых обратной связью, бывает достаточно высоким.
Недостатки параллельных корректирующих устройств:
1. Относительная дороговизна и громоздкость (например, стабилизирующих трансформаторов и др.).
2. Затруднения в некоторых случаях при суммировании основного сигнала и сигнала, поступающего по обратной связи.
Содержание лабораторной работы
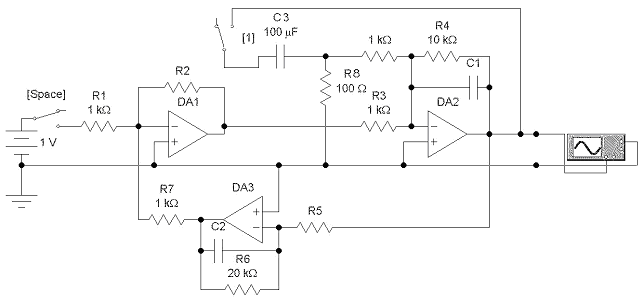
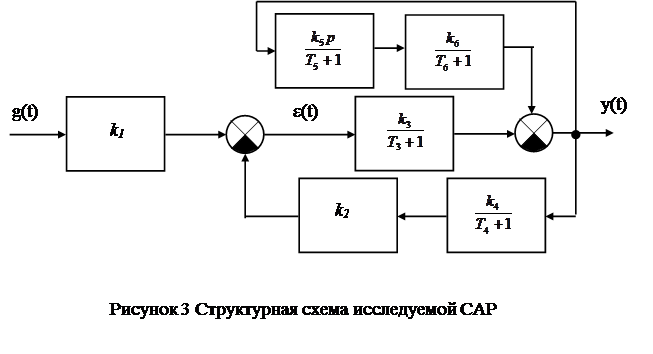
В ходе выполнения лабораторной работы необходимо исследовать влияние гибкой обратной связи на динамические и статические параметры качества САР. Параметры элементов С3 и R8 устанавливаются в соответствии с вариантом назначенным преподавателем и таблицей 1. Принципиальная схема исследуемой САР приведена на рисунке 2
|
В ходе выполнения лабораторной работы необходимо исследовать предложенную САР в двух режимах.
На первом этапе исследуется САР без местной обратной связи (переключатель 1 в положении – «разомкнут»). При этом необходимо измерить величину ошибки, перерегулирования, время регулирования и колебательность.
Затем переключатель 1 переводят в положение – «замкнут» и измеряют те же параметры.
Таблица 1
Значение параметров элементов в соответствии с вариантом
| № | R8, Ом | C3, мкФ |
Содержание отчета
При подготовке к выполнению лабораторной работы необходимо:
1. Зарисовать и проанализировать схему исследуемой системы;
2. Записать в общем виде дифференциальные уравнения исследуемой системы с учетом ограничений принятых для исследуемых элементов (напряжение питания операционных усилителей и т.д.);
3. Вывести передаточные функции;
4. Рассчитать постоянные времени и коэффициенты передачи в соответствии с назначенным вариантом;
После проведения экспериментов в отчет необходимо внести таблицы снятых зависимостей и соответствующие графики. По полученным графикам необходимо рассчитать требуемые параметры качества. На графиках должны быть нанесены пояснения, по которым был бы понятен ход рассуждений.
В заключении необходимо привести выводы о влиянии гибкой обратной связи на качество работы системы автоматического регулирования.
Контрольные вопросы
Отчет по лабораторной работе выполняется в соответствии с внутривузовскими требованиями по оформлению текстовой документации.
Отчет может предоставляться на бумажном носителе или в электронном виде на усмотрение преподавателя.
1. Что называется корректирующими устройствами и их назначение?
2. Какие корректирующие устройства называются параллельными, последовательными?
3. Как влияет жесткая обратная связь на характеристики охватываемых ее звеньев и системы в целом?
4. Как влияют гибкие обратные связи на динамические свойства системы в переходном режиме, на установившийся процесс?
5. Какое влияние оказывает на переходный процесс введение в закон регулирования производных, интеграла?
6. Достоинства и недостатки параллельных и последовательных корректирующих устройств?
7. Что называется структурно-устойчивой и структурно-неустойчивой системой?
8. Как можно стабилизировать неустойчивую систему?
Литература
1. Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. -М.: Наука, 1975. — 768 с.
2. Лукас В.А. Теория автоматического управления: учебник для вузов -2-е изд., перераб. и доп.-М.: Недра, 1990. – 415 с.
3. Сборник задач по теории автоматического регулирования и управления, под редакцией В. А. Бесекерского, издание пятое, переработанное и дополненное, издательство «Наука», Главная редакция физико-математической литературы, М., 1978. — 588 с.
4. Ю. И. Топчеев А.П. Цыпляков Задачник по теории автоматического регулирования Учебное пособие для вузов М., «Машиностроение» 1977. —592 с.
5. Солодовников В.В., Плотников В.Н., Яковлев А.В. «Основы теории и элементы систем автоматического регулирования».-М.: Машиностроение, 1985. — 536 с.
6. Каганов В.Ю., Глинков Г.М., Климовицкий М. Д. «Основы теории и элементы систем автоматического регулирования».-М.: Металлургия, 1987. — 271 с.
7. Теория автоматического управления. Ч. 1 -Теория линейных систем автоматического управления. Под ред. А.А.Воронова.- М.: Высш. шк. 1986.
Дата добавления: 2014-12-09; просмотров: 6073;