Воздушные винты.

Основные параметры воздушного винта, которые мы учитываем при грубом (черновом) подборе мотоустановки – это его диаметр и шаг. Эти параметры зависят в основном от размера самолета, его типа и назначения.
Для копийной модели винт (винты) должны быть соразмерны общему масштабу модели, и иметь требуемое количество лопастей. Для спортивных и тренировочных самолетов – размеры выбираются исходя из необходимых тяговых характеристик, скорости потока от винта и площади обдува этим потоком рулевых плоскостей. Т.к. основную массу некопийных любительских самолетов можно по типу мотоустановки отнести к пилотажным (исключая модели для боя и мотопланеры), стоит подробнее остановиться на этом типе и специфике подбора размеров винта для них.
Самое простое – исследовать статистику, и рассмотреть размеры винтов, рекомендуемых известными и проверенными производителями самолетов (изобретение своего велосипеда – не всегда благодарное занятие) . Если по каким либо причинам такая статистика недоступна, можно принять примерную зависимость, исходя из размера самолета, что бы определить отправную точку для дальнейших размышлений. Для большинства пилотажных самолетов среднего и большого размера (больше 1,5 м) диаметр винта для начала расчетов можно взять как 1/4 от размаха крыла, или чуть (на дюйм) больше для самолетов небольшого размера (1-1,3м) . Действительно – если посмотреть на самые популярные самолеты с устоявшейся комплектацией, то диаметры винтов будут выглядеть примерно так:
Размах крыла Диаметр (в дюймах)
40” (1000mm) 10-11”
47”(1150-1200mm) 12-13”
50-52”(1250-1300mm) 13-14”
66-70”(1500-1600mm) 15-16”
78-82”(2000-2100мм) 19-22”
Для простоты можно воспользоваться и этой нехитрой табличкой – для начала она вполне сгодиться. Следует так же учитывать, что как правило, более скоростные модели, полукопии и тренеры используют винты диаметром поменьше, а фан-флаи и самолеты с развитыми 3D способностями – винты большего диаметра. Так же, часто возникают подвижки в +/- 1-2 дюйма для конкретной модели. Но в целом (как пример статистики), табличка выглядит вполне реально.
Если описывать упрощенно, то диаметр винта в большей степени определяет статическую тягу мотоустановки (грубо говоря, сколько может «поднять» такой винт, будучи направленным вверх), и площадь обдува рулевых плоскостей, как правило элеронов (хвостовое оперение почти всегда находиться в потоке от винта, и обдувается на 100%).
Несложно догадаться, что от статической тяги сильно зависит поведение самолета на вертикальных маневрах, когда подъемная сила крыла попросту отсутствует.
Шаг винта - определяет в большей степени скорость потока воздуха, отбрасываемый от винта (хотя и влияет на статическую тягу мотоустановки тоже, правда в меньшей степени)
Образно говоря – с какой скоростью можно будет двигать поднятый статической тягой груз, и до какой скорости можно разогнать самолет в горизонтальном полете. Второе важное влияние, оказываемое шагом винта - это скорость потока, которым будут обдуваться рулевые поверхности. Т.е от нее сильно зависит скорость реакции самолета на рули, особенно хвостовые. Попадая в крайности можно получить абсурдные ситуации, при которых, например, самолет обладающий огромной статической тягой сможет держать на висении привязанный утюг, но не сможет двигаться из отсутствия достаточного потока от винта. И наоборот.
Соответственно, большая тяговая вооруженность важна при выполнении вертикальных фигур и элементов 3Д-пилотажа. А для скоростных самолетов, гонок, бойцовок – большее влияние оказывает скорость потока, и тяга играет уже второстепенное значение. Самолеты, летающие современные пилотажные комплексы, содержащие много вертикальных составляющих - должны обладать обоими свойствами с приличным запасом. Конечно, иметь запас и по тяге и по скорости потока - хорошо для любого самолета, но ввиду разных причин одновременно не всегда это можно заложить в мотоустановке – это один из серьезных компромиссов, на которые придется пойти при наших расчетах…
Третий «параметр» винта, оказывающий сильное влияние на его свойства – это его тип.
К сожалению, многие начинающие моделисты не принимают его во внимание, и основываясь только на размерах и шаге винта, часто не получают желаемого результата, а иногда и вовсе теряют мотор или сжигают контроллер, перегружая их.
Самые распространенные винты производит фирма АРС. Их подразделение по типам винтов можно назвать сложившимся стандартом де-факто. Из тех типов, которые для нас представляют интерес можно назвать:
Тип «Е» (electro) - классические пилотажные винты для электромоторов. Самый распространенный тип, для оборотов 6-8тыс, небольшой массы, с прочной ступицей. Размерности - почти любые.
Тип «SF» (slowflyer)- очень легкие винты с увеличенной тяговой характеристикой, для легких моделей. Рассчитаны на низкие обороты (до 6 тыс.). Диапазон размеров от 8х3,8 до 13х4,7. Часто используются «внештатно» вместо Е-серии на моделях вплоть до1,5 кг для получения очень большой тяговооруженности (правда ценой некоторых потерь), на свой страх и риск. Имеют легкую небольшую ступицу и невысокая (по сравнению с Е-серией) прочность.
Тип «Р» (pusher) – т.н. «толкающий винт». Винт обратного вращения. Стоит заметить что на электроустановках понятие «толкающий» не особенно актуально, потому что мотор может вращаться в обоих направлениях. Ориентирован больше на ДВС.
Тип «F» (folding)- складной винт (вернее - комплект лопастей, для установки на специальную муфту – «хаб») как правило, для моделей планеров.
Есть еще специализированные типы С, W и пр., но в данной статье мы их рассматривать не будем из за их специфических применений.
В наших расчетах мы будем в основном опираться на тип Е и тип SF – как на наиболее часто применяющиеся универсальные винты. Тип Е применяется почти на любых типах самолетов, от маленьких «летающих крыльев», до спортивных пилотажных самолетов 2 метра размахом и даже выше. Тип SF, штатно – на легких, медленно летающих моделях, преимущественно 3D, «не штатно» - на 3D самолетах размахом до 1300мм и весом до 1,5кг. Забегая вперед скажу почему – SF обладает тяговым коэффициентом в 1,5-2 раза более высоким чем E-серия. Но при этом нагрузка на мотор так же вырастает в 1,5-2 раза.
И в большинстве случаев потери КПД тоже растут. Но это мы рассмотрим чуть ниже.
А пока приведу несколько примеров винтов на вполне конкретных и известных всем самолетах:
Click (150-граммовый зальный самолет) – 8x3,8SF-8x4,7SF
Zoom/Super Zoom/Flash/Sniper (под 3D) – 10х3,8SF – 11х3,8SF
Hyperion Helios-10 - 9х6Е, 10х5Е, 11х5,5Е
Sebart Katana 30E - 13х4Е, 13х6Е, 14х7Е
Pilotage Hotpoint 40 – 15x10E,16x8E
Sebart Angel’s 50E – 16х8Е, 16х10Е
Pilotage Katana 50EV2 – 16x8E
RCF Extra260 26cc – 18x8E
Sebart Katana 120 - 20x10E
Примерно понимая, о каких самолетах идет речь – можно предположить, какие винты лучше использовать на аналогичных по классу и назначениях самолетах.
Теперь, понимая логику применения тех или иных винтов, мы можем подходить к следующему звену нашей цепочки – к выбору бесколлекторного электромотора…
Моторы
Что бы не раздувать статью до уровня многотомного труда, я хочу сразу опустить упоминание некоторые типов двигателей и нюансы их использования. Мы будем рассматривать бесколлекторные двигатели с внешним ротором – они составляют около 95% самолетных электромоторов, а расчеты редуцированных мотоустановок с двигателями с внутренним ротором (инраннеры) имеют теже принципы, что и расчеты аутраннеров., лишь с небольшими нюансами. В целом, приведенные способы расчета на практике проверенно работают в диапазоне мотоустановок от 50 до 2500 ватт. Честно признаюсь, расчеты для микросамолетов весом в 100-150 грамм не всегда совпадали с практическими замерами (вернее, совпадали, но наилучшие результаты получались эмпирическим подбором компонентов, иногда в противоречие расчетам), а расчеты свыше 2,5квт мне не удавалось ни проверить, ни подтвердить, хотя у меня есть надежда, что они будут тоже верны. В целом, адресуя статью скорее начинающим строителям и пилотам, думаю что их запросы будут удовлетворены диапазоном мощностей в 50-2500ватт..
Итак. Какие параметры БК мотора нам нужно знать, чтоб подобрать необходимую модель?
Первое – максимально допустимый ток, который мотор в состоянии безболезненно переварить. Если в процессе работы это значение будет превышено – мотор попросту сгорит. Если ток в предельных режимах работы будет существенно ниже – значит мы не до конца «нагружаем» двигатель, и попросту не используем его потенциальные возможности. Иногда в описании присутствует параметр «рабочий ток», или «ток максимального КПД» - это как раз тот диапазон токов, при котором мотор используется максимально эффективно. Если этот параметр не указан – значит его значение лежит гдето в районе 80-90% от максимально допустимого тока в предельных режимах работы. Сразу отмечу, что в 99% случаев под предельным режимом подразумевается работа мотоустановки на 100% газа в статическом состоянии (грубо говоря - на самолете, который стоит на земле и удерживается руками). Более тяжелого режима для самолета подобрать сложно - попробуйте свой автомобиль привязать к дереву и попробовать как следует погазовать, будучи на первой передаче... Неизвестно кто кого победит, но я уверен, что для мотора и трансмиссии это будет куда более суровым испытанием, чем езда на максимальной скорости или светофорные гонки. Слава богу, для самолета с воздушным винтом такое испытание менее вредно... В любых других условиях – полет на максимальной скорости, висение и фигуры пилотажа – нагрузка на мотор и протекающие в нем токи будут ниже. Об этом надо помнить.
Второй параметр – это количество оборотов на вольт, или kV. Оно обозначает, сколько оборотов в минуту делает вал мотора без нагрузки (без винта), на каждый вольт поданного на него напряжения (аккумуляторной батареи). Попросту говоря, если на мотор с kV=1000 подать 7 вольт, то он будет без винта вращаться со скоростью 7000об/мин. Если подать 11 вольт – то 11000 об/мин. Внимательный читатель сразу заметит практическую сторону этого параметра. Действительно, если с мотором с kV = 1000 и аккумулятором 7,4в абстрактный винт заставить вращаться со скоростью 5000 об.мин, то для мотора с kV=500 для достижения тех же оборотов придеться использовать аккумулятор в 14,8 вольт. Замечу сразу, что в этом примере мы не говорили о разнице в токах! Об этом будет ниже, куда более серьезно...
Третий параметр – внутреннее сопротивление обмоток. Оно сильно влияет на КПД нашего мотора, и на его токопотребление. Обычная единица измерения – мОм, но иногда у некоторых производителей и в некотрых таблицах эту единицу подменяют например кОм-ами или Ом-ами, просто сдвинув запятую в сторону. Это не должно сильно пугать, достаточно посмотреть в параметр похожего мотора, что бы понять куда следует сдвигать запятую в числе, чтоб привести данные к принятому нами стандарту.
Теперь, как применять имеющиеся параметры. Ставим задачу – вращать определенный винт с нужными оборотами (т.е. получая необходимую тягу и скорость потока), не выходя за пределы допустимого для мотора тока, и обеспечивая нужное время работы мотоустановки (обычно 7-10 минут). Все это мы должны рассчитать, исходя из возможностей использовать те или иные аккумулятор (сборку), укладываясь в допустимый вес и бюджет.
Логика расчетов такова:
Мы примерно оцениваем, какое питание мы можем обеспечить для мотора, исходя из веса и размеров модели, и имея уже два более-менее понятных нам компонента (винт и напряжение питания) – ищем последнее «неизвестное» - мотор. Используя более высокое напряжение, мы уменьшаем потребляемые токи при одинаковой потребляемой мощности, но проигрываем в весе аккумуляторов из за большого количества банок. Применяя низкое напряжение питания – мы экономим на количестве банок аккумулятора, но поднимает токи и соотвественно емкость и токоотдачу аккумуляторов (опять же – вес немного растет). Опять же компромисс. Единственно, этот компромис имеет устойчивую тенденцию - чем больше вес самолета и необходимая мощность мотоустановки, тем большее напряжение эффективнее всего использовать. Приведу примеры наиболее популярных решений, от которых можно отталкиваться:
Вес самолета Типичное количество банок аккумуляторов
100-300г. 2 банки (7,4в)
300-1300г 3 банки (11,1в)
1300-2000г 4-5 банок (14-18в)
2000-3000г 6 банок (22в)
3000-6000г 8-10 банок (35-40в)
свыше 6000г 10-12 и более банок
Не стоит воспринимать это таблицу слишком прямо и однозначно – это всего лишь популярные варианты – в каждом конкретном случае могут быть вариации.
Итак, у нас есть подобранные винты в небольшом диапазоне допустимых размеров, и есть пробный вариант с питанием мотора. Теперь нам остается подобрать мотор с нужным кв и с необходимой мощностью (переваривающий необходимый максимально допустимый ток при заданном нами напряжении) .
Для этого придется использовать программу Motocalc.
Motocalc, и его практическое применение
Мотокалк – программа, позволяющая производить расчеты электрических мотоустановок, и анализировать полученные результаты.
Сайт программы – www.motocalc.com
Там же можно скачать демонстрационную версию, которую хватит на месяц работы. Далее, придется покупать лицензию. Замечу, что оно стоит того, т.к. цена вполне оправдывает возможности программы, позволяя сэкономить немало денег на тестовых пропеллерах и неудачно подобранных моторах.
Я не ставлю задачу написать полное руководство пользователя – они написаны без меня, и даже частично переведены на русский язык. Я попробую дать краткое изложение процесса работы, и вкратце объяснить, на что следует обратить внимание при расчетах.
Итак....
После установки, программа стартует с так называемого MotoWizzard. Видимо считается, что эта система способна дать рекомендации по мотоустановкам, но на деле логика ее работы устарела лет на 10, и мотосетапы, предлагаемые ей, актуальны разве что для эры коллекторных моторов. Поэтому, самое разумное действие – закрыть его и сразу перейти к модулю расчетов.
Для начала зайдем в «настройки», и выполним необходимые установки. Думаю, тут вопросов возникнуть не должно.
Просим выводить все в метрической системе, кроме размеров воздушных винтов, которые оставляем в дюймах. Данные по атмосфере и температуре можно оставить без внимания. Список данных выводимых в таблицах можно оставить полностью отмеченным. В Other Options можно сразу снять галочку запуска МотоВизарда. Вобщем -можно просто привести ее к виду, как на иллюстрации, и нажать ОК.
Далее, определям для себя приемлемый диапазон размеров винтов, и заполняем параметры в соответствующем разделе:

В разделе Gear ratio не указываем ничего – там закладываются передаточные отношения редуктора, которого у нас, как мы договаривались, нет.
(если же он есть, скажем, с связке с инраннером – можно туда ввести эти данные, суть расчетов не поменяется)
Вводим диапазон диаметров, и шага винтов, ( Diam – диаметр, и Pitch- шаг) или, если считаем только для винта одного конкретного размера, то заполняем левые поля, а правые оставляем пустым (как пример на иллюстрации – 18х8). Если были заданы несколько размеров винтов – мотокалк даст расчеты отдельно для всех размеров.
Размеры нескольких винтов указываются по возрастанию, слева на право, «by» – с каким ступенью в дюймах мы увеличиваем размеры.
В графах P и T-Const задается тип винта и производитель. Например, для винтов АРС – Т. Const равна единице. Далее вводим P-const - тут уже немного сложней и ответственнее. Разворачиваем свиток P-const:
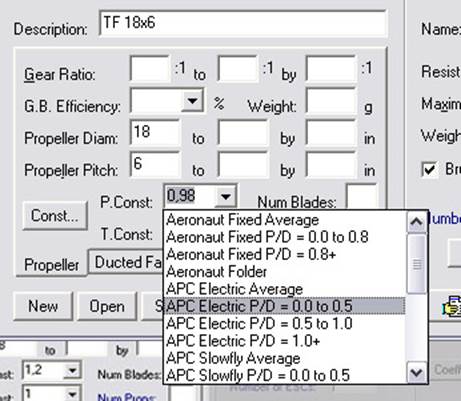
Видим список типов винтов, отсортированных по производителю, и типу винта.
Выбираем нужный тип, и соотношение шага к диаметру (P/D=)
Скажем, для для винта 18х8 P/D будет 0,44, то есть лежать в диапазоне 0.0 to 0.5, а для винта 18х10 – соотвественно уже 0.5 to 1.0.
Хочу обратить внимание, что это очень важный параметр, от которого будет зависеть как расчитанная тяга, так и потребляемый ток.
Пренебрежение этим – одна из самых распространенных ошибок у начинающих пользователей программы, и как следствие – большие погрешности в расчетах.
К сожалению, эти константы не имеют стандартов (они используются только в мотокалке) , и для неизвестного винта (которые отсутствуют в базе программы) очень сложно подобрать верное значение. Возможный путь – визуальное сравнение винта с присутствующими в базе винтами, и выбор похожего аналога по форме лопастей.
Некоторый выбор констант есть на сайте мотокалка : http://www.motocalc.com/data/show.cgi?table=4
Если лопастей 3 или более -указываем их количество в графе Num Blades.
Далее переходим к разделу аккумуляторов (Battery).
Нажав Open, попадем в довольно объемную базу данных по аккумуляторам. Покопавшись в ней, кроме LiPo батарей, там можно обнаружить также А123 (LiFe), которые набирают популярность. При отсутствии нужного аккумулятора просто выбираем его аналог с подходящей емкостью и токоотдачей, я например чаще всего пользуюсь данными Hyperion или Kokam . Далее вводим предполагаемое количество банок в сборке (Series Cells), и при необходимости - количество параллельных включений (скажем, 2 банки 2100мА включенных параллельно, дают нам емкость 4200мА) . Если параллельно включение не используется, то в соответствующей графе указываем единицу. Так же, можно задать диапазон этих значений. Так же, в итоге, будут выданы расчеты для всего указанного диапазона. Как я уже говорил вначале, количество банок будет одним из компромиссов, на которые нам приходится идти.
Следующим этапом будет выбор мотора. Сразу отмечу, что задача эта непростая, и увязывание винтов, напряжений аккумуляторных сборок и мотора - по сути, будет нашим главным компромиссом, искусство поиска которого вырабатывается только с опытом.
Итак, что мы имеем в разделе Motor:

Поле представляет собой набор параметров мотора, которые могут быть введены вручную для любого мотора, либо выбраны в базе данных (довольно объемной), нажатием на кнопку Open. При вводе уникального мотора, самыми важными параметрами является «Motor Constant» - т.е kV (или rpm/V) , и Resistance – внутреннее сопротивление. Не имея одного из этих параметров – расчет не будет иметь смысла из за полной недостоверности результатов. «No-Load Carrent» (ток холостого хода) - оказывает влияние на результат на уровне погрешности, и без необходимости им можно просто пренебречь, подставив значение около 0,5-1А. Вес мотора (Weight) – нужен только для определения веса самолета и расчета летных данных , точность и ценность которых довольно сомнительная, но об этом я расскажу ниже. Т.к. мы приняли, что используем Бесколлекторные моторы с внешним ротором – ставим галочки на Brushless и Out-ranner
Что бы не пересчитывать огромное количество моторов, стоит подробнее остановиться на способах сужения поля поиска из огромной базы, если у пользователя нет никаких отправных точек для выбора мотора. Конечно, проще и разумнее всего обратиться к статистике, посмотрев kV и мощности моторов, рекомендуемых производителями для аналогичных по классу самолетов, или ориентируясь на позиционирование мотора его производителем. К сожалению, часто рекомендации производителей далеки от оптимальных, особенно часто этим грешат производители бюджетных моделей из юго-восточной азии. Более крупные и известные производители иногда рекомендуют мотоустановку минимального уровня, которой достаточно для уверенного поддержания самолета в воздухе, но не более. Собственно поэтому, даже при четко прописанной рекомендованной комплектации к самолету от его производителя – стоит проверить их с помощью расчетов. Если таки статистика недоступна, попробуем разобраться сами, в каком диапазоне и по каким критериям стоит искать моторы для расчетов. Проще всего определиться максимально допустимыми токами (заявленной мощностью), затем примерно определить диапазон kV, который будет для нас приемлемым.
Чтоб определиться с приемлемыми для нас токами, рассмотрим для начала необходимую мощность, которая нужна для нашего самолета. Есть некоторое значение энерговооруженности , которое выведено эмпирическим путем моделистами всего мира, выражаемое в количестве потребляемых ватт мощности на килограмм веса самолета. Для тренировочных самолетов, копий и полукопий - это значение лежит в пределах 180-200 ватт/кг. Для пилотажных самолетов, 3D и фан-флаев - порядка 300-400 ватт/кг. У электропланеров–парителей (не хотлайнеров) – в диапазоне 150-200 ватт/кг. Для хотлайнеров - измеряется уже в киловаттах на килограмм массы, но это уже частные случаи, которые мы рассматривать не будем. Определив для себя напряжение (или диапазон напряжений) аккумулятороной сборки, мы можем вывести максимальное токопотребление нашей мотоустановки, разделив значение необходимой мощности на напряжение питания мотора (Imax = W / Vbatt). Таким образом, мы существенно сужаем область выбора электромоторов, оставив себе только те, у которых разрешенный ток не ниже вычисленного нами значения, и по возможности находящийся в диапазоне, покрывающим запас в 10-15% . Рассматривать более мощные моторы уже не оправданно, потому как их КПД будет уже ниже, и они будет обладать лишним весом.
Так же следует понимать, что максимальный ток, это единственный параметр, ограничивающий использование мотора. Несмотря на рекомендуемое напряжение питания в некоторых описаниях моторов, оно может быть любым. Другое дело, что с повышением напряжения при одном и том же винте, растут и токи.
Если поднимать напряжение питания, одновременно уменьшая размеры винта (оставаясь, тем самым, в пределах допустимых токов) – мы можем существенно повышать мощность мотора, по сути, в неограниченных пределах (конечно, если не рассматривать ресурс механических составляющих, таких как подшипники и валы, и свойства магнитов). Другое дело, что в итоге мы выйдем за минимальный предел в размерах винта, которые могут быть использованы. По сути, мощность – это не параметр мотора, а значение, получаемое с помощью нагрузки конкретного мотора конкретным винтом. На одном и том же моторе мы сами регулируем получаемую мощность, варьируя размерности винтов и (или) питающее напряжение (количесвом банок в сборке), пока не упираемся в пределы допустимых токов (что чревато выходом его из строя), или наоборот, в недостаточную загруженность мотора (что попросту неэффективно).
Другое важное ограничение по токам – это токоотдача аккумуляторов, сверх которой мы тоже не должны выходить. Вообще, исходя из приемлемого времени работы мотоустанвки для обычного пилотажного самолета – порядка 7-10 минут – оптимальным максимальным значением тока будет порядок 10-15С (где С - рабочая емкость аккумулятора). Даже при допустимой нагрузке на аккумулятор в 30С, мы получим время полета порядка 3-4 минут и ниже, что не всегда разумно. Напротив, имея токопотребление ниже 10С - стоит задуматься, а нужен ли аккумулятор такой емкости, т.к. емкость батареи напрямую влияет на ее вес (и ее стоимость, кстати), которыми не стоит пренебрегать...
Выбор диапазона kV, в котором будут происходить расчеты - это вопрос личного опыта, и опять же - статистики. Можно конечно расчетами перебрать все значения kV от 100 до 2000, но это займет массу времени. Для упрощения задачи можно исходить из такой таблички:
Вес самолета Типичное количество банок аккумуляторов Диапазон kV
100-300г. 2 банки (7,4в) 1000-2000
300-1300г 3 банки (11,1в) 800-1500
1300-2000г 4-5 банок (14-18в) 400-800
2000-3000г 6 банок (22в) 300-500
3000-6000г 8-10 банок (35-40в) 250-350
свыше 6000г 10-12 и более банок менее 300
Закономерность примерно такая – чем меньше винт и напряжение питания, тем более высокое kV будет оптимальными.
Теперь нужно заполнить значения в Speed Controller (регулятор оборотов), и при желании – Airframe (об этом ниже)
Параметры регулятора для расчетов особо не важны. Нужно подставить значение максимального тока, которое теоретически может возникнуть, и галочкой указать что он Brushless (т.е. для бесколлекторного мотора).
Airframe – это данные на планер самолета. Теоретически, мотокалк помимо статики способен считать и летные характеристики (т.е. самолет в движении).
Проблема в том, что этот раздел расчетов дает результаты с большими погрешностями, т.к. точно заложить всю аэродинамику самолета в столь небольшой модуль практически не возможно. В принципе, полей там не много, и думаю вопросов и их заполнение возникнуть не должно – при желании можно поэксперементировать.
Но по большом счету – нам вполне достаточно статических расчетов...
Итак все поля заполнены – можно нажимать на кнопку Compute Report и смотреть результат...
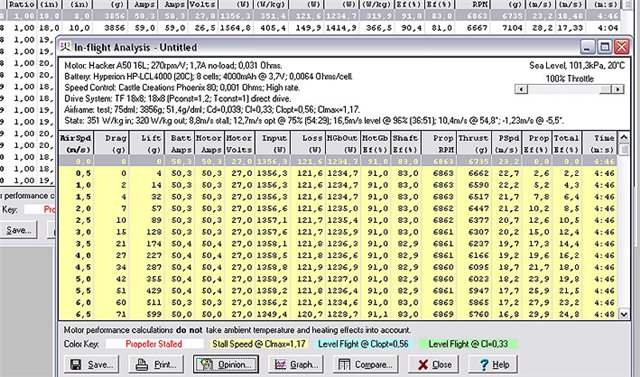
Если в каком либо разделе был указан диапазон значений (размеров винтов, и/или количество банок аккумуляторов), то мы увидим статические результаты для всех значений:
Расшифруем интересующие нас столбцы.
Cells - количество банок в сборке
Diam - диаметр винта (в дюймах)
Pitch - шаг винта
Batt amps - токопотребление на аккумуляторе.
Motor volts – напряжение на моторе, с у четом просадки аккумулятора под нарузкой.
Input W – потребляемая мощность (то что принимается за «мощность мотора»)
Loss – потери мощности на тепло (потери в КПД)
Mgb out - мощность «на валу»
MotGb Ef % - эффективность мотоустановки (по сути – КПД)
Prop RPM – обороты винта
Thrust - статическая тяга в граммах.
Pspd - скорость потока от винта в м/с
Time – время работы мотоустановки в статике на полном газу (реально полетное время будет в 2-3 раза выше).
Щелкнув на интересующей нас строчке с конкретными исходными по винту и батарее, мы попадаем в более подробный отчет:
Точно такая же таблица появляется сразу после нажатия Compute Report, если мы указываем конкретный винт или батарею, без указания диапазона.
Вверху добавляется «слайдер» ручки газа (Trottle), а в таблице появляется столбец AirSpeed.
Если у нас правильно введены данные планера, с некоторой условностью (очень приблизительно) мы можем проанализировать работу мотоустановки при движении самолета. Как видно по таблице, с набором скорости самолетом начинают снижаться токи.
Первая строка – это теже статические данные (AirSpeed = 0). Регулируя «газ», можно посмотреть соответствующие изменения.
Теперь важно понять, какие приоритеты расставить при анализе.
Сверхзадача – оперируя параметрами мотора, батареи и воздушного винта - получить максимальную статическую тягу и скорость потока, при минимальных токах и тепловых потерях, и при максимальной эффективности (КПД) мотоустановки. Часто возникает ситуация, при которой и тяга вроде бы приемлема, и токи – тоже в разумных пределах. Но стоит посмотреть в раздел Loss или MotGb Ef % и понять, что использование энергии аккумулятора неэффективно, и мы впустую сжигаем драгоценные ампер-часы, возя дополнительный вес из за емкости батареи.. Часто это связано с неэффективными оборотами воздушного винта (скажем, SF-серия раскручена до больших оборотов), иногда – с неудачным подбором мотора. Тут нужно принимать решение, насколько это допустимо для нашего самолета и в конкретной ситуации. Сделав несколько расчетов под разные моторы, количество банок в сборке, и под разные винты в приемлемом диапазоне, мы убедимся, что в любом случае приходиться идти на какой-то компромисс. Либо с весом аккумуляторов, либо с токами, либо с винтом меньшего диаметра, либо с падением КПД – с чем-то приходиться мирится. Идеальной мотоустановки не бывает. Суть искусства подбора мотоустановки – в нахождении этого компромисса. Это дается только практикой и опытом, исходя из конкретного самолета, и задач, которые перед ним ставятся...
Вобщем, с теоретической частью, можно считать, мы закончили. Теперь можно тратить деньги на комплектующие нашей мотоустановки, которые, будем надеятся, были внимательно изучены в наших «виртуальных» расчетах. Если с винтами и моторами теперь все ясно, то сейчас рассмотрим, какие регуляторы (контроллеры) и аккумуляторы нам следует приобретать.
Дата добавления: 2014-12-03; просмотров: 3529;