Принципы определения координат точек местности
с использованием «GPS»
Основной принцип «GPS» — использование навигационных искусственных спутников Земли в качестве подвижных геодезических пунктов (точно координированных точек отсчета) для определения расстояний до них по времени распространения излучаемых ими радиосигналов и вычисления координат на Земле на основе тригонометрических соотношений.
Если предположить, что точное местоположение любого используемого навигационного спутника системы в любой момент времени известно, и известно, как определить расстояния до каждого из них, то основополагающая идея «GPS» оказывается простой.
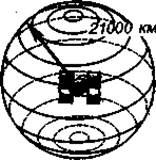
Допустим, мы не знаем своих координат и пытаемся их определить, используя для этой цели навигационный спутник А, находящийся в настоящий момент времени на расстоянии 21 000 км от нас (рис. 2.1).
Очевидно, область нашего местонахождения в космическом пространстве резко сократится и нас следует искать где-то на сфере с центром в спутнике A и радиусом 21 000 КМ.
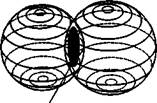
Если же при этом известно, что расстояние от искомой точки до второго навигационного спутника
|
составляет 22 000 км, то единственной областью местонахождения будет линия пересечения двух сфер с центром в спутнике А и радиусом 21 000 км и с центром в спутнике В и радиусом 22 000 км, т. е. окружность (рис.2.2).
И наконец, если измерить расстояние еще и до третьего навигационного спутника С, равное скажем 23 000 км, то возможное местоположение искомой точки уже будет сведено всего к двум точкам, находящимся на пересечении сферы с радиусом 23 000 км с окружностью, полученной от пересечения сфер с радиусами 21000 и 22000 км (рис. 2.3).
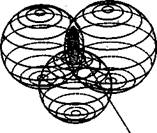
Обычно одно из двух возможных решений является нереальным — например, точка расположена слишком далеко от поверхности Земли, либо имеет неправдоподобно большую скорость. Поэтому, программное обеспечение компьютеров приемников «GPS» автоматически выделяет истинное местоположение искомой точки из двух возможных. Таким образом, чтобы определить точное местоположение точки, теоретически достаточно трех измерений до трех навигационных спутников. Однако, как будет установлено далее, существует техническая причина, по которой для точного определения местоположения точки требуется еще и, как минимум, четвертое измерение до четвертого навигационного спутника.
Определив расстояния как минимум до четырех навигационных спутников (подвижных геодезических пунктов), в дальнейшем для определения координат (местоположения) точки, решают обычную задачу обратной трилатерации, т. е. обратной линейной засечки.
2.2 Измерение расстояний до навигационных спутников «GPS»
В связи с тем, что любая «GPS» основана на определении расстояний до навигационных спутников, очевидно должны быть разработаны и соответствующие методы их определения.
Основной принцип определения расстояний до навигационных спутников состоит в измерении времени, за которое радиосигнал спутника достигает приемника на Земле, и в последующем вычислении по этому времени искомого расстояния.
Поскольку радиоволны распространяются с огромной скоростью, т. е. со скоростью света (около 300 000 км/с), нужно уметь очень точно определять момент выдачи сообщения навигационным спутником и момент его приема приемником «GPS» на Земле. Очевидно разница (сдвижка) во времени выдачи сигнала спутником и его приемом на Земле даст время распространения сигнала а, следовательно, и расстояние до данного спутника. При таком подходе часы в системе должны быть исключительно точными и совершенными. Действительно, при ошибке в определении времени распространения радиосигнала всего на 0,01 с ошибка в определении расстояния составит порядка 3000 км.
На каждом навигационном спутнике, в связи с этим, установлен комплект из 4-х самых точных атомных часов, которые чрезвычайно дороги и громоздки. На всех приемниках «GPS» вынужденно, устанавливают очень дешевые и компактные кварцевые часы, которые, однако, существенно уступают по точности хода атомным.
Главной трудностью определения времени распространения радиосигнала является точное выделение момента, времени, в которое радиосигнал был передан со спутника. В системах «GPS» эта задача решена синхронизацией сигналов навигационных спутников в Космосе и приемников «GPS» на Земле таким образом, чтобы они точно в одно и то же время генерировали один и тот же бинарный (двоичный) код. Бинарный код — это очень сложная, тщательно подобранная и кажущаяся случайной последовательность логических нулей и единиц, которая повторяется каждую миллисекунду. Такие специально усложненные коды (для надежности и однозначности их сравнения) называют псевдослучайными кодами (рис. 2.4).
Учитывая, что псевдослучайные коды на спутниках и приемниках строго синхронизированы, для определения времени распространения радиосигнала и, следовательно, расстояния до данного спутника, достаточно принять от него радиосигнал и поставить его с точно таким же псевдослучайным кодом приемника. Сдвиг одного кода по отношению к другому будет соответствовать времени прохождения радиосигнала от навигационного спутника до приемка «GPS» (рис, 2.5).

Рис. 2.5. Определение времени распространения радиосигнала
по сдвижке псевдослучайных кодов
Поскольку точность измерения времени распространения радиосигнала кварцевыми часами приемников существенно уступает точности атомных часов навигационных спутников, возникает проблема устранения смещения шкалы времени приемников «GPS».
Можно легко установить, что если три точных измерения времени распространения радиосигналов спутников позволяют определить точное местоположение точки в трехмерном пространстве, то тоже самое обеспечивают четыре неточных измерения времени.
Для облегчения понимания этого принципа рассмотрим решение этой задачи в двухмерном пространстве, т. е. на плоскости, временно исключив одно измерение.
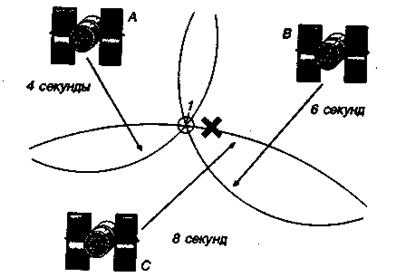
Представим себе, что мы находимся на расстоянии в 4 с от спутника А в 6 с от спутника В. Этих двух точных измерений было бы достаточно для однозначного определения местоположения точки 1 на плоскости (рис.2.6, 1)
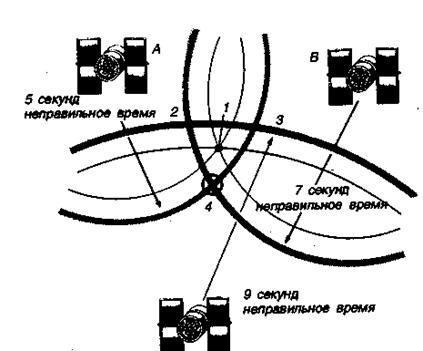
Таким образом, местоположение точки 1 было бы установлено, если бычасы приемников «GPS» были бы столь же совершенны, как и атомные часы на навигационных спутниках. Теперь представим себе, что условно часы в приемниках отстают на одну секунду. Тогда расстояния до искомой точки были бы установлены с соответствующими ошибками. Составили соответственно до спутника А — 5 с и до спутника В — 7с. I результате положение искомой точки 1 было бы ошибочно определено в точке 2 (рис. 2.6, 2).
Следует иметь в виду, что внешне это бы выглядело абсолютно правильным результатом, поскольку у нас нет возможности установить, что часы приемника отстают.
|
Программное обеспечение компьютеров приемников «GPS» построено таким образом, что когда в них поступают измерения, не дающие пересечения в одной точке, то в результате решения по меньшей мере четырех уравнений с четырьмя неизвестными (для трехмерного пространства) находится единственная точка, соответствующая исправленным значениям расстояний до четырех навигационных спутников, т. е. таким образом устраняется неточность хода часов приемника.
Для определения точного местоположения искомой точки в трехмерном пространстве требуется по меньшей мере четыре неточных измерения расстояний (псевдодальностей) до четырех навигационных спутников.
Для определения с необходимой точностью местоположения точек, на системах «GPS» учитывают и другие возможные источники ошибок.
Поскольку в системах «GPS» навигационные искусственные спутники Земли используются как точки отсчета (т. е. как подвижные пункты геодезической сети), то орбиты спутников и местоположение каждого из них на орбитах (эфемериды) должны быть в любой момент времени точно известны. Поэтому каждый приемник «GPS» содержит в памяти своего компьютера «альманах», т. е. непрерывно обновляемый справочник, из которого может быть определено точное местоположение любого спутника орбитального комплекса на любой момент времени.
Незначительные отклонения местоположения навигационных спутников от теоретических орбит (ошибки эфемерид), связанные с влиянием гравитационного поля Солнца и Луны, а также давления солнечного света, обнаруживаются наземными контрольными станциями слежения. Вычисленные поправки к
|

орбитам передаются обратно на спутники, заменяя собой прежнюю информацию в памяти бортовых компьютеров. Спутники помимо непрерывной подачи кодовых радиосигналов ежеминутно передают на Землю поправки к своему орбитальному положению, обновляя альманахи каждого приемника «GPS».
И, наконец, в системах «GPS» учитывают погрешности, связанные с задержками прохождения радиосигналов через ионосферу и тропосферу Земли. Эти погрешности учитывают либо введением усредненных поправок, либо использованием специальных приемников, работающих на двух радиосигналах разной частоты. В последнем случае ионосферные и тропосферные задержки прохождения радиосигналов определяются непосредственно в ходе измерений, поскольку они обратно пропорциональны квадрату частоты радиоизлучения.
Необходимость для определения местоположения точек измерения расстояний по меньшей мере до четырех навигационных спутников, необходимость учета разнообразных погрешностей измерения расстояний, а также назначение производимых измерений предопределили большое разнообразие конструкций приемников «GPS».
Рекомендуемая литература
1. Федотов Г.А. Инженерная геодезия. – М.: Высш. шк., 2004.- 463 с.
Контрольные задания для СРС (тема 2) [1]
1. Принципы определения координат точек местности с использованием «GPS».
2. Измерение расстояний до навигационных спутников «GPS».
Тема №3Определение положения точек земной поверхности
с помощью геодезических спутниковых систем(3часа).
План лекции
1. Методы определения координат пунктов.
2. Приемная спутниковая аппаратура.
3. Производство топографических съемок с применением систем спутникового позиционирования.
Дата добавления: 2014-12-20; просмотров: 6370;