Электромеханический исполнительный привод (ЭМИП)
ЭМИП является в конструктивном и функциональном отношении самостоятельным изделием, включающим в себя механическую, электрическую (электротехническую) и информационную части, которые можно использовать индивидуально и в различных комбинациях с другими модулями. Отличием электромеханических мехатронных модулей движения (ЭМММД) от обычных не мехатронных ЭМИП является наличие встроенной информационной части.
Развитие современных технологий микроэлектроники сделали возможным изготовление миниатюрных датчиков, электронных блоков, которые могут успешно интегрироваться в ЭМИП и тем самым, превращать его в ЭМММД.
Укрупнено состав типичного ЭМИП представлен на рис. 10.3. Здесь ЭМИП состоит из электродвигателя – электротехнического преобразователя электрической энергии в механическую энергию. Для преобразования механического движения используются различные механические преобразователи (передаточные механизмы). Также сюда можно отнести и люфтовыбирающие механизмы и соединительные устройства (тормоза, муфты). Информационная часть включает измерительные приборы, преобразователи информационных сигналов. Обычно в информационной части используются кинестетические датчики, которые формируют информационный массив данных об механических величинах – обобщенных силах, координатах, скоростях, ускорениях.
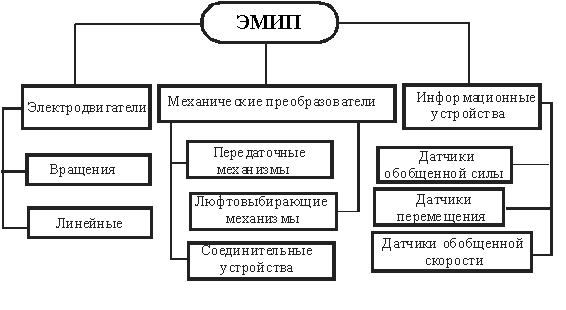
Рис. 10.3. Состав ЭМИП
Электромеханический мехатронный модуль движения, которая включает расширенную информационно-измерительную систему, электронные силовые преобразователи для электродвигателей и микропроцеесорные системы управления называются интеллектуальным мехатронным модулем движения. В дальнейшем, в основным рассматриваются такие интеллектуальные мехатронные модули движения, которые названы электромехатронными модулями движения (ЭММД). Под интеллектуальными мехатронными модулями будем называть мехатронные модули движения, в которых применяются интеллектуальные методы в управлении. Ниже на рис. 10.4 приведена упрощенная функциональная схема ЭММД.
Здесь не показан источник питания, который может быть общим для всех энергопотребителей или отдельным для УК, СП и ЭД, МП.
На данной функциональной схеме показаны источник и обьект, которые не являются элементами ЭММД. Однако информация об обьекте является обязательным, как в процессе функционирования так и на стадии формирования цели функционирования ЭММД. Каждый из приведенных составных функциональных элементов, в дальнейшем, в той или иной мере будет рассмотрен. Здесь лишь следует заметить, что под УК понимается совокупность аппаратных и программных средств для автоматического управления через СП электродвигателем. Причем УК получает сигналы от системы управления, расположенного иерархически выше, а также получает информацию о внешней среде (обьекте) и внутреннем состоянии ЭММД с помощью информационно-измерительной системы. Силовой преобразователь представляет электронное устройство, систему предназначенную для непосредственного управления электродвигателем в соответствии с сигналами сформированными УК.
Следует заметить, что на схеме показано, что МП подключается в некоторых случаях к источнику питания. Такие случаи могут иметь место, если имеются электромагнитные муфты или тормоза, они также могут управляться от УК.
Рис. 10.4. Функциональная схема ЭММД
Важной особенностью ЭММД является то, что он содержит элементы различной природы, электронные, электротехнические, механические, информационные.
Особенность мехатронных систем в том, что в них циркулируют взаимосвязанные энергетические и информационные потоки. Это следует из анализа ЭММД, который является структурной единицей мехатронной системы.
Дата добавления: 2017-05-18; просмотров: 755;