Энергетический показатель асинхронного двигателя.
 ;
;  .
.
Из первой формулы следует, что с увеличением активного сопротивления в цепи ротора, КПД ротора снижается:
 ;
;  ;
;  ;
;
 ;
;  ;
;  .
.
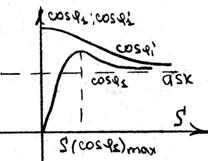
Коэффициент мощности (из схемы замещения):
 ;
;
 ;
;  .
.
cosj’ – коэффициент мощности без учета контура намагничивания;
cosj1 – коэффициент мощности с учетом контура намагничивания определяют из векторной диаграммы.
 .
.
Тормозные режимы.
Асинхронный двигатель работает в тех же тормозных режимах, что и двигатель постоянного тока: рекуперативного торможения, торможения противовключения, динамического торможения с самовозбуждением, динамического торможения с независимым возбуждением.
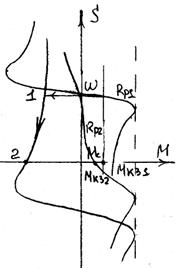
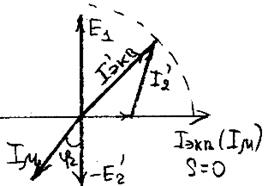
Рекуперативное торможение. Этот режим имеет место при скоростях w>w0.
Или при отрицательном скольжении S<0. Он возникает при приложении к валу асинхронного двигателя активно движущегося момента, который вращает ротор двигателя в ту же сторону, что и в двигательном режиме.
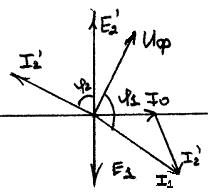
Из векторной диаграммы видно, что активная составляющая тока статора I1 представляет из себя проекцию вектора тока I1 на вектор Uф, и будет направлена навстречу напряжению, что говорит о рекуперации энергии в сеть. В то же время рекуперативная составляющая тока совпадает с вектором напряжения из чего следует, что асинхронный двигатель потребляет реактивную энергию. С ростом скорости угол j2 растет, а j1 уменьшается.
При скольжении Sгм=-1/а эти углы становятся равными p/2, а активная составляющая тока ротора и статора становится равной нулю. В этой точке реализуется режим динамического торможения, при скольжении по модулю ½S½>½Sгм½ рекуперация энергии отсутствует. Для малых машин это позволяет осуществить рекуперацию в сеть при скольжении меньше Sгм, для крупных машин это ограничение не существенно поскольку½Sгм½®¥.
КПД в рекуперативном торможении
 .
.
КПД в генераторном режиме hг>hдв.
В рекуперативном режиме механическая характеристика является продолжением характеристики двигательного режима.
Критический момент в генераторном режиме больше, чем в двигательном режиме.
Режим противовключения. Он возможен при изменении чередования фаз питающего напряжения или когда ротор асинхронного двигателя движется под действием активного момента, который больше момента короткого замыкания двигателя в сторону противоположную вращению ротора.
Так как ротор двигателя в режиме противовключения вращается в обратную сторону по отношению к вращению статора, то скольжение будет равно
При этом существует определенное скольжение на двигательном и тормозном режиме, который выражается следующими соотношениями:
| Двигательный режим | Режим противовключения |
| w=w0-w0S | w=w0Sпр-w0 |
| w=w Sпр=2-S |
Так как скольжение больше 1, то в режиме противовключения возникают большие токи и моменты. Для ограничения токов необходимо включить в ротор дополнительное сопротивление.
Следует заметить, что дополнительное сопротивление также способствует увеличению коэффициента мощности и момента.
 .
.
Обычно R’2 в относительных единицах равно 0,8¸1,3.
 .
.
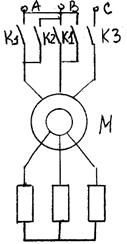
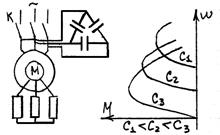
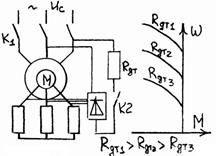
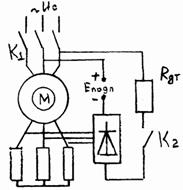
Динамическое торможение. Для реализации динамического торможения асинхронного двигателя обмотка его статора отключается от сети переменного тока и подключается к источнику постоянного тока.
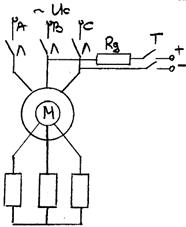
При включении контакта Т и при отключении контакта Л в обмотке статора протекает постоянный ток, который создает неподвижное относительно статора магнитное поле. При вращении ротора это поле индуктирует в обмотке ротора ЭДС частота, которого пропорциональна скорости вращения ротора. ЭДС вызывает в обмотке ротора ток. Созданная этим током намагничивающая сила вращается относительно ротора, но неподвижна относительно статора. Взаимодействие тока ротора с неподвижным магнитным полем приводит к созданию тормозного момента. Асинхронный двигатель в режиме динамического торможения представляет из себя синхронный генератор, нагрузкой которого является сопротивление ротора, однако синтез процессов динамического торможения проще и удобнее рассматривать, представляя асинхронную машину. Идеализированная машина переменного тока по обмоткам статора которой протекает трехфазный симметричный переменный ток с частотой f1, а сам статор вращается со скоростью  в направлении обратном направлению вращения поля. При этом скорость магнитного поля будет равна 0, как и в реальной машине при динамическом торможении. При динамическом торможении ток обмотки статора не зависит от параметров машины, а зависит от питания источника статора, но при переходе к идеализированной машине переменного тока считают, что статор питается от источника тока с частотой f1, в этом случае схема замещения будет следующая:
в направлении обратном направлению вращения поля. При этом скорость магнитного поля будет равна 0, как и в реальной машине при динамическом торможении. При динамическом торможении ток обмотки статора не зависит от параметров машины, а зависит от питания источника статора, но при переходе к идеализированной машине переменного тока считают, что статор питается от источника тока с частотой f1, в этом случае схема замещения будет следующая:
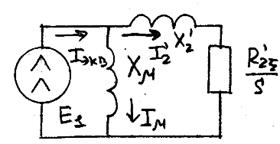
При переходе с идеализированной машины переменного тока считаем, что обмотка статора, получающая питание от симметричной сети переменного тока, создает такую же намагничивающую силу, что и постоянный ток, при этом амплитуда намагничивающих сил, создаваемая переменным током, равна амплитуде намагничивающих сил создаваемых постоянным током F=Fн;  , I1 – действующее значение тока статора, W1 – число витков в обмотке статора.
, I1 – действующее значение тока статора, W1 – число витков в обмотке статора.
При переходе к динамическому торможению необходимо, чтобы ток был равен эквивалентному току  .
.
Соотношение между эквивалентным по намагничивающей силе переменным током Iэкв и эквивалентным постоянным током Iн определяется схемой соединения обмоток статора при динамическом торможении. Наиболее часто употребляют схемы соединения обмоток статора следующие:
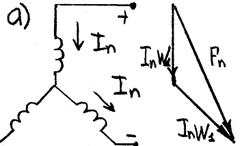


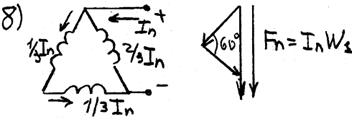
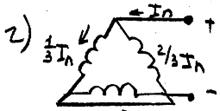
Наиболее просто реализованы схемы а и в.С точки зрения намагничивания все схемы приблизительно равны.
Поскольку идеальная двухфазная машина питается от источника тока, то намагничивающий ток резко меняется при изменении скольжения
Чем выше скорость, скольжение стремится к бесконечности и под действием реакции тока ротора асинхронный двигатель размагничивается.

S – скольжение.
При скольжении равном нулю машина насыщена, асинхронный двигатель находится в насыщенном состоянии Im=Iэкв.
С ростом скорости угол  растет, растет ток I’2
растет, растет ток I’2  Двигатель размагничивается.
Двигатель размагничивается.
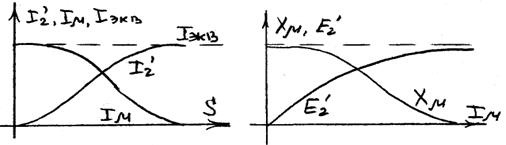
Получили, что магнитная цепь непостоянна, поэтому приходится учитывать кривую намагничивания. Мы считаем, что машина не насыщаема. Можно считать, что магнитная цепь не насыщаема, когда m<0,4Iэкв.
Поскольку Хm=f(Im) ,то рассчетную механическую и электромеханическую характеристику динамического торможения необходимо получить с учетом кривой намагничивания.
 ;
;
 ;
;  ;
;  ;
;
 - электромеханическая характеристика.
- электромеханическая характеристика.
 ;
;  ;
;  ;
;  ;
;  .
.
Если принять, что Хm=const, то можно привести к упрощенной формуле Клосса:
 .
.
Графики механических характеристик:
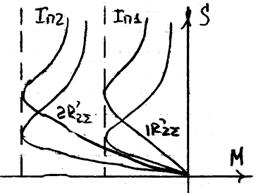 In=const; In2>In1.
In=const; In2>In1.
Критическое скольжение при динамическом торможении значительно меньше, чем в обычной схеме включения, так как Хm0>>>Хкз, кроме того, если даже ХmIm=Uф, а так как тормозной момент Мдтк<Мпр в обычных схемах. В связи с этим обычно принимают Iэкв=(2¸4)Im0.
Динамическое торможение с самовозбуждением. Может быть конденсаторное и для асинхронного двигателя с фазным ротором. Возможен режим динамического торможения с самовозбуждением с подпиткой статора от ротора через выпрямительный мост.
1)  2)
2)  3)
3) 
Дата добавления: 2016-02-09; просмотров: 1978;