Управление рулем высоты, рулем направления и элеронами
Назначение. Системы управления РВ, РН и элеронами относятся к основному управлению. Они обеспечивают управление самолетом относительно поперечной, продольной и вертикальной осей. Управление РВ предназначено для управления самолетом по тангажу, управление РН – по курсу, управление элеронами – по крену.
Основное управление имеет систему стопорения на стоянке с целью предотвращения поломки рулей при ударах об упоры от ветра и струй реактивных двигателей.
Классификация. По виду управляющего воздействия управление РВ, РН и элеронами может быть ручное (пилотом), автоматическое (САУ) и совмещенное (пилотом и САУ одновременно). Ручное управление показано на рис. 14.
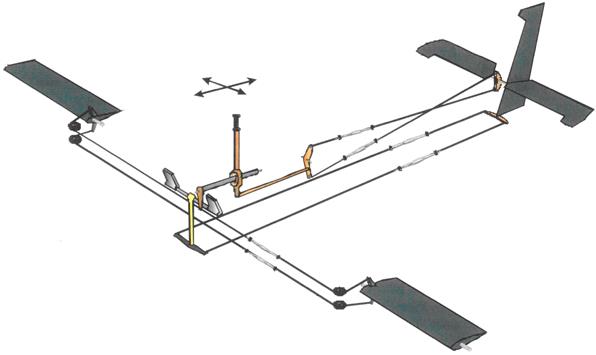
Рис. 14. Схема ручного управления рулем высоты,
рулем направления и элеронами
По конструкции управление может быть безбустерным или бустерным.
В безбустерном управлении движение от рычага управления передается через проводку управления на рулевую поверхность. Усилие на рычаге управления при этом зависит от шарнирного момента руля, т. е. от скоростного напора (скорости самолета) и от угла отклонения рулевой поверхности.
В бустерном управлении в проводке управления устанавливается бустер (гидроусилитель) (рис. 15). Движение от рычага управления передается через проводку управления на золотник бустера, который распределяет давление жидкости в полости цилиндра, соединенного с рулевой поверхностью. Усилие на рычаге управления не зависит от шарнирного момента руля и создается с помощью механизмов загрузки. Установка бустера в управлении самолетом объясняется необходимостью снижения усилий на рычагах управления и
необходимостью улучшения характеристик устойчивости и управляемости самолета.
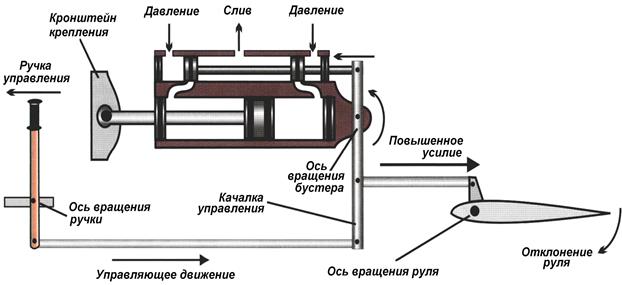
Рис 15. Схема системы бустерного управления
Если в бустерном управлении проводка управления электрическая, то управление называется электродистанционным (рис. 16).
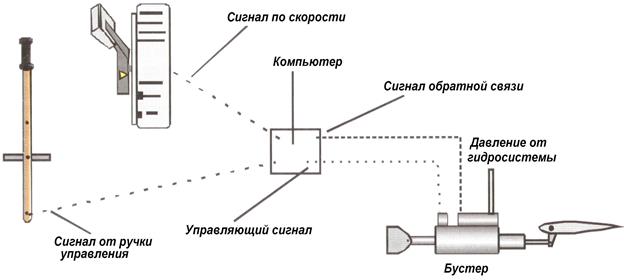
Рис. 16. Схема электродистанционного управления
Основными элементами систем управления являются рычаги управления, проводка управления, бустеры (рулевые приводы, гидроусилители), агрегаты загрузки рычагов управления (загружатели) и механизмы для снятия нагрузки с рычагов управления (механизмы триммерного эффекта).
Рычаги управления – установленные в кабине экипажа устройства, с помощью которых пилот управляет рулями. В зависимости от типа самолета в системах управления могут быть установлены следующие рычаги управления:
– ручки для управления РВ и элеронами;
– штурвальные колонки для управления РВ;
– штурвалы для управления элеронами;
– педали для управления РН.
По принятым в мировой практике правилам при движении ручки или штурвальной колонки на себя «нос» самолета должен подниматься, от себя – опускаться. При движении ручки вправо или штурвала по часовой стрелке самолет должен крениться вправо. При движении правой педали (ноги) вперед самолет должен разворачиваться вправо.
Транспортные и пассажирские ВС имеют двойное управление для первого и второго пилотов. В пилотской кабине установлены две колонки со штурвалами (штурвальные колонки) управления РВ и элеронами и две пары педалей для управления РН.
Проводка управления служит для передачи движения от рычага управления (от пилота или САУ) на рулевую поверхность (при безбустерном управлении) или на золотник бустера (при бустерном управлении). По конструкции проводка управления может быть жесткой и гибкой. Жесткая проводка включает в себя: тяги, направляющие тяг, гермовыводы, качалки. Гибкая проводка – это тросы, направляющие для тросов, гермовыводы.
Бустер (рулевой привод, гидроусилитель) является гидравлической следящей системой с большим коэффициентом усиления (по усилиям), входным сигналом которой служат перемещение входного звена от проводки управления, а выходным – перемещение рулевой поверхности давлением жидкости. По количеству входных и выходных звеньев бустер может быть одно-, двух-, трехкамерным с раздельным гидропитанием от независимых гидросистем. По конструктивным признакам – с переходом на жесткое управление или без перехода. Все бустера выполняются следящими, т. е. движение выходного звена пропорционально движению входного звена, или отклонение рулевой поверхности пропорционально движению рычага управления.
Бустер выполняет также роль стопора рулевой поверхности за счет запирания жидкости в его полостях гидрозамком при неподвижном рычаге управления.
По конструкции бустера могут быть с подвижным и неподвижным силовым цилиндром и с золотниками, расположенными на корпусе или внутри силового штока.
Агрегаты загрузки рычагов управления (загружатели) служат для имитации аэродинамической загрузки на рычагах управления, пропорциональной углу отклонения рулевой поверхности. В некоторых системах загружатели имитируют и скоростной напор.
Механизмы для снятия нагрузки с рычагов управления (механизмы триммерного эффекта) служат для снятия усилий (триммирования усилий) от загружателей.
Пример 1.Управление рулем высоты самолета Як-42.
Управление РВ самолета Як-42 – безбустерное, с жесткой проводкой управления [2, рис. 4.1]. Управление осуществляется двумя штурвальными колонками или рулевой машиной автопилота САУ-42.
Пример 2. Управление рулем направления самолета Як-42.
Управление РН осуществляется двумя парами педалей из кабины экипажа, автономным демпфером рысканья АДР-42, а также системой САУ-42. В системе управления установлен гидроусилитель БУ-270А [2, рис. 4.2].
При перемещении педалей (или выходного звена рулевой машины САУ-42, или исполнительных механизмов АДР-42) движение передается через жесткую проводку на золотник гидроусилителя, который обеспечивает подачу жидкости в полости гидроусилителя. В результате этого перемещается корпус гидроусилителя, соединенный через жесткую проводку и пружинный сервокомпенсатор с РН.
В режиме бустерного управления при нормальном шарнирном моменте усилия с руля на педали не передаются (необратимая схема включения гидроусилителя). Поэтому в системе установлены механизм загрузки и механизм ограничения хода педалей. Механизм загрузки педалей (пружинного типа) создает усилия, пропорциональные углу отклонения руля, а механизм ограничения хода педалей (пружинного типа) ограничивает ход педалей путем создания дополнительного усилия на половине хода руля при убранном шасси.
Педали служат также для управления разворотом колес передней опоры и для основного торможения.
Автономный демпфер рысканья АДР-42 предназначен для улучшения характеристик боковой устойчивости и управляемости самолета при выключенном демпфере рысканья системы САУ-42.
Пример 3.Система управления элеронами самолета Як-42.
Управление элеронами осуществляется штурвалами, соединенными через жесткую проводку с элеронами, а также рулевой машиной РД-12 системы САУ-42, подключенной к проводке управления элеронами. Угол поворота штурвала при постановке элеронов на упоры ±75°.
Дата добавления: 2018-03-02; просмотров: 27382;