Точность системы управления
АНАЛИЗ СИСТЕМ УПРАВЛЕНИЯ
Требования к управлению
В задаче стабилизации наиболее важны свойства установившегося режима. Для следящих систем в первую очередь нужно обеспечить высокое качество переходных процессов при изменении задающего сигнала (уставки).
В целом можно выделить четыре основных требования:
• точность– в установившемся режиме система должна поддерживать заданное значение выхода системы, причем ошибка (разница между заданным и фактическим значением) не должна превышать допустимую;
• устойчивость– система должна оставаться устойчивой на всех режимах, не должна идти «вразнос» (корабль не должен идти по кругу при смене курса);
• качество переходных процессов– при смене заданного значения система должна переходить в нужное состояние по возможности быстро и плавно;
• робастность– система должна сохранять устойчивость и приемлемое качество даже в том случае, если динамика объекта и свойства внешних возмущений немного отличаются от тех, что использовались при проектировании.
Процесс на выходе
Ниже представлен способ, как вычислить процесс на выходе системы с передаточной функцией W(s) при входном сигнале, для которого известно изображение по Лапласу X(s).
При нулевых начальных условиях изображение выхода равно  . Предположим, что W(s) и X (s) – рациональные функции, то есть их можно представить в виде отношения полиномов
. Предположим, что W(s) и X (s) – рациональные функции, то есть их можно представить в виде отношения полиномов
 .
.
Для простоты считаем, что полиномы Δ(s) и dX(s) имеют только простые вещественные корни, поэтому
 ,
,
причем общих корней у них нет. Числа  и
и  называются полюсами функций W(s) и X(s) соответственно.
называются полюсами функций W(s) и X(s) соответственно.
При этих условиях произведение можно разложить на простые дроби
 .
.
Здесь  и
и  – постоянные, которые в данном случае определяются по формулам
– постоянные, которые в данном случае определяются по формулам
 .
.
Далее мы предположим, что произведение W(s) X (s) несократимо. В этом случае все числа ai и bj не равны нулю.
Чтобы найти выход y(t), нужно вычислить обратное преобразование Лапласа для Y(s). По таблицам находим
 . (1)
. (1)
Функция eλt при t →∞ стремится к нулю, если λ < 0; остается постоянной (равной 1) при λ = 0 и уходит в бесконечность при λ > 0. Поэтому выражение (1) позволяет сделать следующие выводы:
• сигнал на выходе системы зависит как от свойств передаточной функции системы, так и от входного сигнала;
• для того чтобы переходный процесс затухал (функция y(t) стремилась к нулю), все числа и должны быть отрицательными (иметь отрицательные вещественные части);
• если один из полюсов W(s) или X(s) равен нулю, y(t) может иметь постоянную (незатухающую) составляющую;
• если хотя бы один из полюсов W(s) или X(s) больше нуля (имеет положительную вещественную часть), выход системы неограниченно растет.
Важна несократимость произведения W(s)X(s), иначе некоторые коэффициенты ai и/или bj могут оказаться нулевыми и соответствующие экспоненты «исчезают» из формулы (1). Тогда, например, может оказаться, что выход не «уходит в бесконечность» даже если W(s) или X(s) имеет полюс с положительной вещественной частью (и он сократился в произведении W(s) X(s)).
Как следует из (1), часть показателей экспонент (числа ) полностью определяются свойствами системы – это корни полинома Δ(s) . Если среди них есть числа с положительной вещественной частью, сигнал выхода будет неограниченно возрастать при любом входе, для которого произведение W(s)X(s) несократимо. В этом случае говорят, что система неустойчива, а соответствующие полюса также называют неустойчивыми. Полином Δ(s) называется характеристическим полиномом, так как расположение его корней определяет устойчивость (или неустойчивость) системы.
Точность системы управления
Точность системы обычно оценивается для одного из эталонных входных сигналов. Это может быть, например, единичный скачок
 ,
,
или линейно возрастающий сигнал
 ,
,
или гармонический сигнал с частотой ω
 .
.
Точность системы в установившемся режиме определяется ошибкой e(t) или ее изображением E(s). Для ее исследования используют передаточную функцию по ошибке We(s), которая связывает изображения ошибки и входного сигнала
 . (2)
. (2)
Рассмотрим контур управления, состоящий из регулятора и объекта
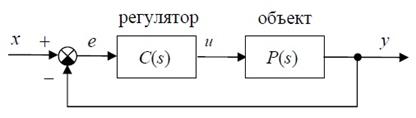
Представим передаточные функции C(s) и P(s), а также изображение входа X(s) в виде отношения полиномов
 .
.
В данном случае передаточная функция по ошибке равна
 ,
,
где  – характеристический полином замкнутой системы.
– характеристический полином замкнутой системы.
Рассмотрим реакцию системы на единичный ступенчатый входной сигнал, изображение которого равно X(s) = 1/s. Сигнал ошибки определяется полюсами передаточной функции We(s)(то есть корнями характеристического полинома Δ(s)) и полюсами изображения X(s). На практике все полюса We(s) должны иметь отрицательные вещественные части, иначе система будет неустойчивой. Поэтому нулевых полюсов у функции We(s) быть не может. Тогда
 .
.
Здесь изображение Y0(s)имеет полюса только с отрицательной вещественной частью, а постоянная b рассчитывается по формуле разложения на простые дроби
 .
.
После затухания всех экспонент с отрицательными показателями получим  .
.
Для того чтобы сделать нулевой статическую ошибку, достаточно обеспечить  (то есть регулятор должен содержать интегратор) или d(0) = 0 (объект содержит интегратор).
(то есть регулятор должен содержать интегратор) или d(0) = 0 (объект содержит интегратор).
Этот результат можно обобщить для любых незатухающих входных сигналов, изображения которых имеют полюса на мнимой оси (в точке s = 0 или в точках s = ± jω). Для того чтобы ошибка стремилась к нулю при t →∞ необходимо, чтобы эти полюса сократились в произведении
 .
.
А это, в свою очередь, возможно только тогда, когда они являются корнями полинома dC(s)d(s), то есть, внутри системы есть модель входного сигнала. Этот принцип называется принципом внутренней модели.
Например, для точного отслеживания ступенчатого сигнала нужно, чтобы объект или регулятор содержали интегрирующее звено (с передаточной функцией 1/s). Тогда произведение dC(s)d(s) имеет сомножитель s, и полюс X(s) в точке s = 0 сократится в произведении We(s)X(s). Таким образом, если передаточная функция разомкнутого контура C(s)P(s) содержит множитель s в знаменателе, обеспечивается нулевая ошибка слежения за постоянным сигналом (нулевая статическая ошибка). Поэтому такую систему называют астатической.
Для отслеживания линейно возрастающего сигнала в контуре должно быть уже два интегратора (нужно сократить двойной полюс X(s) в точке s = 0). Такая система обладает астатизмом второго порядка. В общем случае система, в которой
 ,
,
где ν > 0 – натуральное число и функция G(s) не имеет нулей и полюсов в точке s = 0, называется астатической системой ν-ого порядка. Такая система в установившемся режиме без ошибки отслеживает сигнал вида
 ,
,
при любых значениях коэффициентов  .
.
Казалось бы, для повышения точности можно поставить много интеграторов, и все проблемы будут решены. Но при этом нужно учесть, что мы говорили только о точности в установившемся режиме, не затрагивая переходные процессы и вопросы устойчивости. Добавление каждого нового интегратора ухудшает переходные процессы, осложняет стабилизацию системы, снижает быстродействие. Например, двойным интегратором в принципе невозможно управлять с помощью простого регулятора-усилителя (так называемого пропорционального регулятора или П-регулятора). Кроме того, если разомкнутая система включает два интегратора и более, для сигнала ошибки e(t) справедливо ограничение
 .
.
Поскольку интеграл от ошибки равен нулю, часть времени ошибка должна быть положительной, а часть – отрицательной. Поэтому при любом управлении не удастся получить монотонный переходный процесс (когда сигнал выхода подходит к заданному значению «с одной стороны», как у апериодического звена).
Для стохастической системы, в которой все процессы имеют случайный характер, точность оценивается с помощью математического ожидания и дисперсии ошибки.
Дата добавления: 2017-05-18; просмотров: 1920;