З.8. Совершенствование GPS -наблюдений
Для точного координирования углов капитальных зданий используется геодезическая система, приведенная на рис. 3.6. Геодезический GPS-приёмник располагается на участке местности, наиболее благоприятном для спутниковых наблюдений. В непосредственной близости от строений происходит искажение сигналов , кроме того фазовый центр приёмника невозможно совместить с координируемым углом здания.
 Поворотные точки земельных участков, при межевании, редко закрепляются на местности твёрдыми геодезическими пунктами. В течение времени граничные метки утрачиваются и возникают хозяйственные споры. Точные координаты углов капитальных зданий это надёжная основа для восстановления границ землепользования.
Поворотные точки земельных участков, при межевании, редко закрепляются на местности твёрдыми геодезическими пунктами. В течение времени граничные метки утрачиваются и возникают хозяйственные споры. Точные координаты углов капитальных зданий это надёжная основа для восстановления границ землепользования.
Рис. 3.6. Система адаптеров для совместного использования DISTO и GPS-приёмника
Выводы по главе 2
1. Для точного позиционирования на местности лазерный прибор DISTO необходимо использовать совместно с адаптером LSA-360.
2. Лазерный прибор DISTO может работать совместно с теодолитами и геодезическими штативами при условии использования специального адаптера [1].
3. Точному позиционированию лазерного прибора DISTO на местности способствует применение вехи с круглым уровнем, фотоштатива и накладного цилиндрического уровня.
4. Лазерному прибору DISTO D5 до начала работ требуется поверка (калибровка) датчика наклона, которая может быть выполнена с помощью экзаменатора угломера.
Вопроса для самопроверки
1. В каких случаях лазерный прибор DISTO может использоваться в «ручном» режиме, а в каких нет?
2. Как измерить горизонтальное проложение линии в теодолитном ходе с помощью DISTO?
3. Как устроен адаптер LSA-360?
4. Как устроен адаптер трегера?
5. Для чего нужны дипод и трипод?
6. Дайте описание операции центрирования лазерного прибора с геодезическим штативом.
7. Для чего вводится поправка в длины линий при использовании геодезического штатива?
8. В каких случаях необходимо использовать отражающие пластины?
9. При использовании отражающих пластин иногда возникает сообщение DISTO об ошибке. В чём может быть причина и что следует предпринять?
10. Как выполнить калибровку датчика наклона?
11. Последовательность действий при калибровке датчика наклона DISTO.
12. Как можно использовать DISTO D5 в качестве лазерного нивелира?
13. С какой целью используются биподы или триподы?
14. Что из себя представляет 3-х штативная система?
15. Как повысить точность координирования углов капитальных зданий при GPS –наблюдениях.
Глава 4. Построение съёмочных сетей
Геодезические съёмки должны производиться в государственной системе координат и высот. Сети сгущения 1-го и 2-го разрядов, как правило, служат основой для развития съёмочных сетей – сетей съёмочного обоснования.
4.1. Плановое съёмочное обоснование
До производства съёмочных работ на участке местности должно быть создано плановое съёмочное обоснование. Пункты съёмочного обоснования закрепляются на местности временными или долговременными центрами. Для возможности обнаружения для каждого пункта составляются абрисы, где они привязываются линейными засечками к местным предметам.
Для создания съёмочного обоснования могут использоваться различные способы. Традиционным способом считается построение теодолитного хода. Могут использоваться прямые и обратные угловые засечки. Наличие лазерного прибора DISTO D5 позволяет обходиться, при построении съёмочного обоснования без теодолита.
Теодолитный ход
Для производства съёмочных работ на участке местности прокладывают теодолитный ход в виде многоугольника или ломаной линии. Теодолитный ход прокладывается на местности для того чтобы координаты можно было передать на все пункты съёмочного обоснования.
Начало и конец теодолитного хода должны опираться на «твёрдые» пункты, то есть такие пункты, положение которых известно в местной системе координат. Это делается для того чтобы можно было обеспечить контроль всех измерений.
Полевые работы в теодолитном ходе.Теодолитный ход обязательно начинается с привязки. Привязка теодолитного хода это комплекс работ по определению координат исходного пункта и направления исходной стороны в местной системе координат. Для привязки используются пункты опорной геодезической сети, в числе которых могут быть координированные углы капитальных зданий. Привязке следует уделять особое внимание. Работа должна сопровождаться журналами измерений и наглядной схемой.
| Рис.4.1. Пример схемы теодолитного хода с результатами измерений |
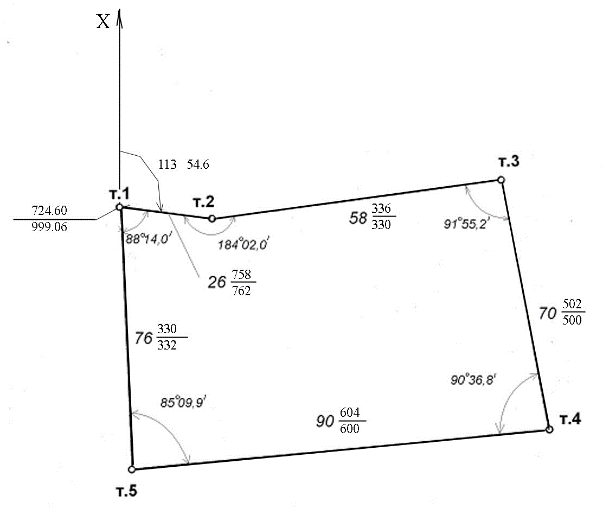 В теодолитном ходе измеряются горизонтальные углы при вершинах. Для измерений используется способ приёмов. Если приходится наблюдать с одной станции более двух направлений, то следует использовать способ круговых приёмов. Запись результатов должна производиться в журнал установленной формы (см. табл. 2.1). Параллельно с записью в журнале средние значения горизонтальных углов выписываются на схеме хода.
В теодолитном ходе измеряются горизонтальные углы при вершинах. Для измерений используется способ приёмов. Если приходится наблюдать с одной станции более двух направлений, то следует использовать способ круговых приёмов. Запись результатов должна производиться в журнал установленной формы (см. табл. 2.1). Параллельно с записью в журнале средние значения горизонтальных углов выписываются на схеме хода.
Горизонтальные проложения линий следует измерять лазерным прибором DISTO D5. Результаты измерений в прямом и обратном направлениях приводятся на схеме хода (см. рис. 4.1).
При возможности следует использовать трёхштативнную систему. Для этого, кроме трёх штативов необходимо иметь ещё два трегера с отражателями (см. рис. 3.3). При отсутствии достаточного количества штативов необходимо запастись вехами с отражающими пластинами и отвесами. Отражающие пластины можно изготовить из листов фанеры 150×150×3 мм и прикрепить к вехам. При установке вехи в вертикальное положение нитяный отвес можно держать в руке. Вехи должны иметь остро заточенные концы. При измерении горизонтальных углов визирование следует производить на самый низ вехи или на минимальном удалении от него. При производстве работ лазерный прибор должен быть настроен на измерение горизонтальных проложений.
Работа на станции выполняется в следующей последовательности:
· - измеряется горизонтальный угол;
· - верхняя часть теодолита снимается с трегера;
· - в трегер устанавливается адаптер к которому крепится лазерный прибор DISTO;
· -над задней точкой устанавливается отражающая пластина и производится измерение с горизонтального проложения;
· -над передней точкой устанавливается отражающая пластина и производится измерение горизонтального проложения;
В целом по ходу, в полевых условиях должна быть проконтролирована угловая невязка. Угловая невязка это разность суммы измеренных углов при вершинах теодолитного хода и теоретической суммы этих же углов.
Теоретическая сумма внутренних углов n-угольника вычисляется по формуле
∑βтеор= 180º (n-2). (4.1)
Угловая невязка по абсолютной величине должна быть менее допускаемой.
Камеральная обработка теодолитного хода. Результаты измерений из полевого журнала переписываются в специальную ведомость (см. табл. 4.1).
Ниже рассматривается пример обработки теодолитного хода, приведенного на рисунке 4.1.
Теодолитный ход выполнен в виде пятиугольника. Теоретическая сумма внутренних углов пятиугольника составляет значение
∑βтеор = 180º (5-2) =540º 00'.
Фактическая сумма измеренных углов находится путём их последовательного сложения в виде
184º 02,0'
+91º 55,2'
275º 57,2'
+…………
∑βизм = 539º 57,9'
Угловая невязка вычисляется в виде
fβ = Σβизм – Σβтеор = -2,1' . (4.2)
Допускаемая угловая невязка для полигона из пяти вершин составляет
{fβ} = 1  = 2,2′.
= 2,2′.
Угловая невязка по абсолютной величине не должна превышать допускаемую, иначе угловые измерения следует повторить. Если угловая невязка по абсолютной величине менее допускаемой, то производится уравнивание измеренных углов путём введения поправок.
Поправки распределяются поровну между измеренными углами. Точность поправки не должна быть выше точности измерений, то есть 0,1′ ,и сумма поправок должна составлять точное значение невязки, но с обратным знаком. Поправки выписываются в ведомости в виде целых чисел над последней значащей цифрой измеренного угла.
Исправленные углы записываются в ведомости рядом с измеренными углами.
Для вычисления приращения координат линии теодолитного хода необходимо знать горизонтальное проложение этой линии и её направление, то есть дирекционный угол.
Результаты измерения горизонтальных проложений линий в прямом и обратном направлениях приведены на схеме (см. рис.4.1). Горизонтальное проложение каждой линии находится, как среднее арифметическое из двух значений.
Направление исходной стороны определено в результате привязки. Дирекционный угол последующей стороны полигона равен дирекционному углу предыдущей стороны плюс 180º и минус исправленный правый угол при вершине. Вычисления производятся в виде непрерывного столбца:
αт.1-т.2= 113 54,6
+180 00
293º 54,6
-184º 02,4
αт.2-т.3= 109º 52,2
………….
………….
αт.1-т.2= 473º 54,6
-360º 00
αт.1-т.2= 113º 54,6
В результате вычислений по замкнутому контуру должно получиться точное значение исходного направления. Если условие контроля выполнено, то полученные значения дирекционных углов выписываются в ведомость (табл. 4.1 , ст. 4). Для каждой линии теодолитного хода, с помощью калькулятора вычисляются приращения координат. При работе с калькулятором следует помнить, что аргумент тригонометрической функции должен быть в градусах и десятичной форме.
Например, требуется найти значение cos(113º 54,6').
Для этого выполняются следующие действия:
54,6/60 +113 = функция cos результат -0,40530.
Линия т.1-т.2:
∆X2 = 26,76  cos(113º54,6') = 10,85 м;
cos(113º54,6') = 10,85 м;
∆Y2 = 26,76 sin(113º54,6') = 24,46 м.
Линия т.2-т.3: и т. д.
Теоретическая сумма приращений координат по Х и по Y равна нулю так, как теодолитный ход замкнутая фигура. Фактические суммы приращений координат замкнутого полигона могут отличаться от нуля и их величины принято называть невязками.
Таблица 4.1
Ведомость вычисления координат пунктов теодолитного хода
| № вер шин | Внутренние углы правые | Дирекционные углы | Горизонтальные проложения, м | Приращения координат , м | Координаты , м | Вершины | |||||||||
| измеренные | исправлен. | ± | DX | +/- | DY | X | Y | ||||||||
| град | мин | град | мин | град | мин | ||||||||||
| т.1 | 724,60 | 999,06 | т.1 | ||||||||||||
| +4 | 54,6 | 26,760 | - | 10,85 | + | 24,46 | |||||||||
| т.2 | 02,0 | 02,4 | - | 10,85 | + | 24,46 +1 | 713,75 | 1023,52 | т.2 | ||||||
| +4 | 52,2 | 58,333 | - | 19,82 | + | 54,86 | |||||||||
| т.3 | 55.2 | 55,6 | - | 19,82 + 1 | + | 54,87 +3 | 693,93 | 1078,39 | т.3 | ||||||
| +4 | 56,6 | 70,501 | - | 67,07 | - | 21,72 | |||||||||
| т. 4 | 36,8 | 37,2 | - | 67,06 +3 | - | 21,69 +4 | 626,87 | 1056,70 | т.4 | ||||||
| +4 | 19,4 | 90,602 | + | 26,98 | - | 86,49 | |||||||||
| т.5 | 09,9 | 10.3 | + | 27,01 +2 | - | 86,45 +3 | 653,88 | 970,25 | т.5 | ||||||
| +5 | 09,1 | 76,331 | + | 70,70 | + | 28,78 | |||||||||
| т.1 | 14,0 | 14,5 | + | 70,72 | + | 28,81 | 724,60 | 999,06 | т.1 | ||||||
| 54,6 | |||||||||||||||
| т2 | Р = 322,547 | - | 97,74 | - | 108,21 | ||||||||||
| + | 97,68 | + | 108,10 |
∑βизм =539º57,9´ fХ = -0,07 fУ = -0,11 fабс=√( fХ2 +fУ2) = 0,13
∑βтеор =180º (n-2) = 540º00´ fотн =1/(Р:fабс)= 1/2480
fβ =∑βизм - ∑βтеор= -2,1´ {fотн} =1/2000
{fβ} = 1´  = 2,2′ fотн <{fотн}
= 2,2′ fотн <{fотн}
Невязка по Х составит
fХ = ΣΔX = -0,07 м.
Невязка по Y
fY = ΣΔY = -0,11 м.
Абсолютная невязка полигона
fабс = √(fx2 + fy2)= 0,13 м .
Отношение абсолютной невязки к периметру полигона называется относительной невязкой:
fотн = 1/(P:f) =1/2480.
Относительная невязка не должна превышать предельного значения{fотн}, в зависимости от условий на местности.
В случае, если относительная невязка допустима, следует выполнить уравнивание приращений координат путём введения поправок. Поправки вводятся пропорционально длинам линий с точностью до сантиметра. Сумма поправок должна быть равна невязке с обратным знаком по соответствующей координате. Исправленные приращения координат выписываются в ведомости под соответствующими вычисленными ранее значениями.
Координаты исходного пункта теодолитного хода получены в результате привязки. Координаты последующих пунктов хода вычисляются через исправленные приращения в виде:
X, м Y, м
т. 1 724,60 999,06
-10,85+24,46
т. 2 713,75 1023,52
-19,82+54,86
………………………………………………………
т. 1 724,60 999,06
Контроль вычислений состоит в получении значений координат исходного пункта. По завершении контроля вычислений значения координат всех пунктов выписываются в ведомость (см. табл. 4.1).
Ход трилатерации
На участке студенческого городка ЮЗГУ в период учебной полевой практики был проложен экспериментальный ход TLR на 4 секции. Начало хода опиралось на координированные углы капитальных зданий, а замыкался ход на твердый пункт ппТп. Схема хода и результаты измерений приведены на рисунке 4.2.
Все вычисления можно свести в специальную ведомость (см. табл. 4.2).
Для привязки хода требуется вычислить длину исходной стороны и её направление, то есть решить обратную геодезическую задачу.
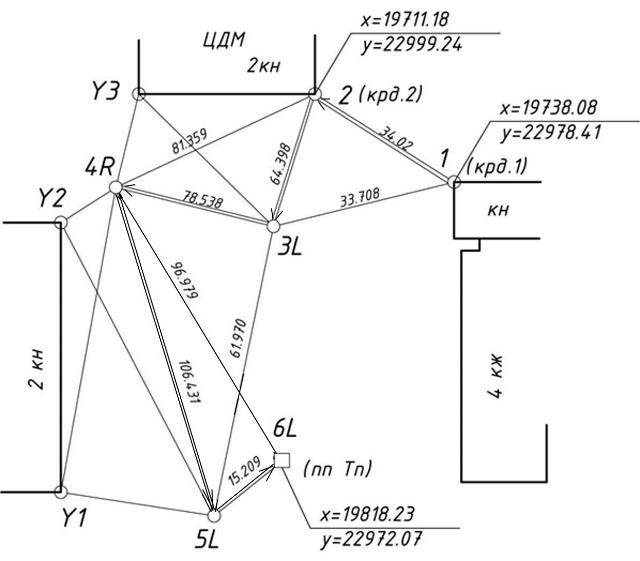
Рис. 4.2. Ход трилатерации (TLR) на участке ЮЗГУ
Линия 1-2: находим приращения координат, горизонтальное проложение и направление





Вычисления в секции I.


Контроль: 
Примычный угол:

Дирекционный угол:

Приращения координат:


Вычисления в секциях II, III, IV выполняются аналогично и их результаты приведены в таблице 4.1.
После вычисления приращений координат необходимо вычислить невязки в приращениях координат и невязку в периметре хода.
Невязка по оси x:
 ,
,
где 

Невязка по оси y:
 ,
,
где 

Невязка в периметре хода

Поскольку абсолютная невязка меньше точности представления координат, то уравнивание хода не производилось.
Координаты 3-х новых пунктов хода приведены в таблице 4.2
| Секция | Наименование. | L1 | L2 | b2 | b1 | U° | α° | d, м | Приращения координат | Координаты | ход | ||||
| ход | сеть | Δx,м | Δy,м | X,м | Y, м | ||||||||||
| крд 1 | 19738,08 | 22978,41 | |||||||||||||
| 142,248 | 34,020 | ||||||||||||||
| крд 2 | 19711,18 | 22999,24 | |||||||||||||
| I | 33,708 | 64,398 | 61,262 | -27,241 | 17,954 | 340,202 | 64,398 | 60,592 | -21,812 | ||||||
| 3L | 19771,77 | 22977,43 | 3L | ||||||||||||
| II | 81,359 | 78,538 | 28,697 | 35,701 | 68,568 | 91,634 | 78,538 | -2,235 | 78,506 | ||||||
| 4R | 19764,54 | 23055,94 | 4R | ||||||||||||
| III | 61,970 | 106,431 | 86,936 | -8,399 | 35,231 | 306,865 | 106,431 | 63,851 | -85,150 | ||||||
| 5L | 19833,39 | 22970,79 | 5L | ||||||||||||
| IV | 96,979 | 15,209 | 10,119 | 96,312 | 48,292 | 175,157 | 15,209 | -15,155 | 1,284 | ||||||
| 6L | ппТп | 19818,23 | 22972,07 | 6L | |||||||||||
| f | 0,003 | -0,002 |
Таблица 4.2
Ведомость вычисления координат в ходе трилатерации
Для составления технического плана при постановке на кадастровый учет требуется координирование углов капитальных зданий. Координированные углы могут быть использованы как пункты съёмочного обоснования при горизонтальной съёмке.
Для координирования углов капитальных зданий в ходе TLR создаются дополнительные и промежуточные секции, которые опираются на элементы основных связующих секций.
Рассмотрим последовательность вычисленной обработки при координировании Y1, Y2, и Y3 (рис. 4.7).
Секция 4R-6L-Y1 положительно ориентирована. Для неё имеем:
 и
и 
Примычный угол: U=49,946°.
Дирекционный угол: α=76,919°.
Приращения координат:
Δx = 11,488 м; Δy = 49,441 м
Координаты: 

Секция 4R-5L-Y2 положительно ориентирована. Для неё имеем:
 и
и  .
.
Примычный угол: U = 5,291°.
Дирекционный угол: α=121,574°.
Приращения координат:
Δx = -50,756 м; Δy = 82,586 м.
Координаты: 
 .
.
Секция 3L-4R-Y3 положительно ориентирована. Для неё имеем:
 и
и 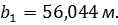
Примычный угол: U = 61,785°.
Дирекционный угол: α = 209,849°.
Приращения координат:
Δx = -41,266 м; Δy = -23,680 м.
Координаты: 

| Рис. 4.3. Схема координирования углов капитальных зданий |
 Расстояния между координированными углами по фасаду здания были измерены в период съёмки и показаны на рисунке 4.7.
Расстояния между координированными углами по фасаду здания были измерены в период съёмки и показаны на рисунке 4.7.
Вычисляя по координатам горизонтальные проложения, определяем погрешности в промежуточных секциях, а именно для линии Y1-Y2 это 10 мм и для линии крд2-Y3 это 15 мм.
Требуемая точность координирования при составлении технического плана ±100 мм.
4.2. Высотное съёмочное обоснование
Для производства топографической съёмки помимо планового требуется высотное съёмочное обоснование, которое создаётся в виде нивелирного хода.
В нивелирном ходе различают три группы точек.
1. Связующие точки – такие геодезические пункты, которые нивелируются с двух станций по двум сторонам рейки. Их отметки вычисляются через увязанные превышения.
2. Промежуточные точки – закрепленные пункты или опознаваемые фрагменты местности, сооружений, которые нивелируются с одной станции по одной стороне рейки. Их отметки вычисляются через горизонт прибора. При крупномасштабных съемках к числу промежуточных точек обычно относят буровые скважины, колодцы, вершины курганов, естественные выходы ископаемых, урезы воды в водохранилищах, выходы родников, устои мостов, головки рельсов железных дорог на перегонах и против станций, межевые и километровые столбы, опорные башмаки светофоров, опоры ЛЭП, линий связи и осветительной сети и др.
3. Х- точки – это вспомогательные связующие точки, определяемые условиями видимости либо значительным перепадом высот. В качестве Х точек могут использоваться переносные башмаки.
Полевые работы. До начала измерений должна быть проведена рекогносцировка местности, намечен маршрут и установлены все точки нивелирного хода. Ход обязательно должен начинаться с репера и заканчиваться на репере.
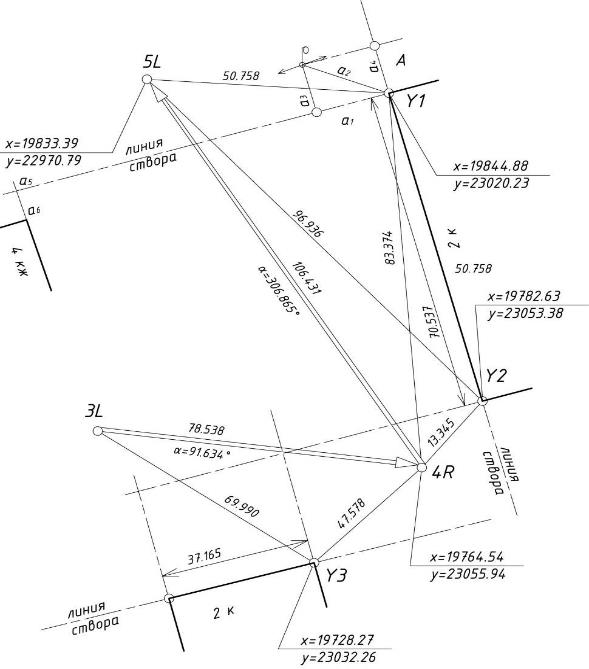
Результаты измерений записываются в журнал (таблицу 4.3). Журнал обязательно дополняется схемой нивелирного хода (рис. 4.4), где указываются все реперы с отметками их высот. Схема, как правило, рисуется «от руки» и в полевых условиях.
На каждой станции выполняется контроль превышения. Различие превышений вычисленных по чёрной и красной шкалам реек не должно превышать 5 мм. За окончательный результат принимается среднее арифметическое hср из двух значений.
После замыкания нивелирного хода в полевых условиях производится контроль по всему ходу. Для этого вычисляется фактическая невязка (мм) по ходу в виде
fhф = [ hср ] - [ hтеор], (4.3)
[ hср ] - сумма средних превышений по всем станциям для связующих точек,
[ hтеор ] - теоретическая сумма превышений конца хода над началом, равна разности отметок конечного и начального пунктов нивелирования. Для замкнутого хода эта сумма равна нулю.
| Рис. 4.4 Схема нивелирного хода высотного обоснования |
 Допускаемая невязка по ходу (мм) для технического нивелирования при длине хода до 1 км при числе станций n находится в виде
Допускаемая невязка по ходу (мм) для технического нивелирования при длине хода до 1 км при числе станций n находится в виде
f hдоп  . (4.4)
. (4.4)
Для более протяженных ходов
f hдоп =  , (4.5)
, (4.5)
где L - длина хода в километрах.
Если фактическая невязка по ходу по абсолютной величине менее допускаемой, то полевые работы завершаются.
Камеральные работы.Для подтверждения правильности полевых вычислений производится постраничный контроль журнала. Для этого на каждой странице журнала находится сумма задних отсчетов [a] и сумма передних отсчетов [b], также сумма средних превышений [h] . Естественно, что для каждой страницы журнала число задних и число передних отсчетов должно совпадать.
Для постраничного контроля необходимо выполнение условия
[h] = ([a] – [b])/2. (4.6)
Если контроль завершился успешно, то производится уравнивание превышений. Для этого вычисляются поправки (мм) в каждое измеренное превышение в виде
h*= - fhф / n, мм (4.7)
Значение поправки со своим знаком выписывается над каждым средним превышением.
Затем вычисляются исправленные (увязанные) превышения (мм) в виде
hув = hср +h* (4.8)
и записываются в журнале под средними превышениями.
Отметки связующих точек вычисляются по следующему правилу: отметка последующей связующей точки равна отметке предыдущей связующей точки плюс исправленное превышение.
После того как вычислены отметки всех связующих точек, приступают к вычислению отметок промежуточных точек. Для этого по станциям, где имеются промежуточные точки, вычисляют горизонты прибора в виде
ГПi =Нзi +аi, м (4.9)
где Нзi отметка задней связующей точки для i-ой станции;
аi - черный отсчет по рейке, установленной на задней связующей точке для i-й станции.
Раздельно для каждой станции, где имелись промежуточные точки, вычисляются их отметки (м) в виде
Нk = ГПi - сk, (4.10)
где ck - отсчет по черной стороне рейки , для k-й промежуточной точки.
Результаты вычислений записываются в журнал (табл. 4.3).
Таблица 4.3
ЖУРНАЛ
Технического нивелирования
Дата: 19.07.2014 Погода: пасмурно, ветер
| Станции | Пункты | Отсчёты по рейке, мм | Превышения , мм | Горизонт прибора ГП, м | Отметки пунктов Н, м | |||
| Задние | Передние | Промежуточные | Вычисленные | Средние/увязанные | ||||
| I | Rp | 240,240 | ||||||
| +1 | ||||||||
| т1 | -0332 | -0332 | 239,909 | |||||
| -0332 | -0331 | |||||||
| II | т1 | 240,107 | ||||||
| +1 | ||||||||
| т2 | ||||||||
| III | т2 | |||||||
| т3 | ||||||||
| IV | т3 | |||||||
| т4 | ||||||||
| V | т4 | |||||||
| х | ||||||||
| VI | х | |||||||
| т5 | ||||||||
| VII | т5 | |||||||
| Л1 | ||||||||
| Л2 | ||||||||
| Л3 | ||||||||
| Л4 | ||||||||
| Rp | ||||||||
Журнал нивелирования обязательно должен сопровождаться элементами контроля. Если записи произведены на нескольких страницах, то на каждой странице должен быть постраничный контроль. Под таблицей, после замыкания нивелирного хода следует указывать невязки: фактическую и допускаемую.
Выводы по главе 4
1. Для производства топографической съёмки на местности создаётся плановое и высотное съёмочное обоснование.
2. Традиционным методом создания планового съёмочного обоснования можно считать построение на местности теодолитного хода.
3. Альтернативным методом создания планового съёмочного обоснования будет ход трилатерации с использованием лазерного прибора Disto.
4. Высотное съёмочное обоснование для крупномасштабной съёмки создаётся в виде нивелирного хода.
Вопроса для самопроверки
1. Какой конфигурации могут быть теодолитные ходы?
2. Какие элементы контроля используются в теодолитном ходе?
3. Что означает координатная привязка теодолитного хода?
4. Как подсчитать угловую невязку замкнутого теодолитного хода?
5. Как подсчитать угловую невязку разомкнутого теодолитного хода?
6. Как подсчитать невязки в приращениях координат?
7. Как производится распределение невязок в теодолитном ходе?
8. Какие величины подлежат определению в ходе трилатерации?
9. Как обеспечить контроль в ходе трилатерации?
10. Как подсчитать фактическую невязку для разомкнутого нивелирного хода?
11. Как вычисляются отметки связующих точек?
12. Как вычисляются отметки промежуточных точек?
Глава 5. Съёмочные работы и составление плана
Топографический план составляется для того, чтобы с его помощью решать определённый круг инженерных или землеустроительных задач. Отсюда вытекают требования к минимальному объёму информации, которую следует почерпнуть в полевых условиях при проведении съёмочных работ [2, 9].
Условные знаки
Изображение ситуации и рельефа производится с помощью условных знаков [2, 8]. Таблицы условных знаков составлены в Центральном научно–исследовательском институте геодезии, аэросъёмки и картографии. Эти знаки обязательны для всех предприятий, организаций и учреждений, выполняющих топографо–геодезические и картографические работы, независимо от их ведомственной принадлежности. Вид условного знака зависит от масштаба съёмки. Для масштабов 1:500 и 1:1000 используются, как правило, условные знаки одного вида. В таблице П3 приведены примеры наиболее часто употребляемых условных знаков упомянутых масштабов.
Условные знаки можно разделить на две части: масштабные и внемасштабные. Внемасштабные условные знаки показывает только местоположение предмета. Масштабные условные знаки показывют местоположение предмета и его размеры. Масштабные условные знаки, в свою очередь, могут быть линейными и площадными. Таким образом, при сьёмке ситуации может решаться одна из трёх задач: 1) определение местоположения точки местности, 2) прямой линии и 3) кривой общего вида.
Рельеф - это совокупность неровностей земной поверхности. Естественный рельеф поверхности Земли образовывался в течение длительного исторического времени под влиянием различных геологических факторов, поэтому образовалась система, поддающаяся определённому анализу.
Различают следующие основные формы рельефа и их элементы.
Гора, холм – это возвышенность конической формы, выше 200 метров над окружающей местностью и соответственно ниже. Самую высокую точку такой возвышенности называют вершиной, а боковые поверхности, которые внизу заканчиваются подошвой называют скатами.
Котловина – это углубление чашеобразной формы. Самую низшую точку котловины называют дном. Боковые поверхности, которые вверху заканчиваются бровкой, также называют скатами.
Хребет – это возвышенность удлинённой формы. Линию вдоль хребта, проходящую по самым высоким точкам, называют водоразделом.
Лощина – это углубление удлинённой формы. Линию, проходящую вдоль лощины по самым низким точкам, называют водотоками или тальвегами.
Водораздел и тальвег называют иногда структурными, или инвариантными линиями рельефа.
Широкие лощины с пологими скатами называют долинами. Лощины в виде глубоких промоин в долинах, образующиеся под действием поверхностных, вод называют оврагами. С течением времени обрывы оврагов зарастают травой, древесной растительностью и образуются балки.
Седловина – это пониженная часть местности между двумя возвышенностями. Седловина включает в себя как водораздел, так и тальвег. Они пересекаются в точке, окрестность которой называется инвариантной площадкой рельефа.
Искусственная форма рельефа может отличаться от природной. Это обусловлено технологией производства земляных работ. Например, при рытье котлованов или при открытых горных разработках визуально на местности прослеживаются линии уступов, которые не характерны для естественных форм рельефа. Линии уступов можно считать обособленными структурными линиями рельефа.
Для изображения рельефа используется метод горизонталей, числовых отметок, а также имеются специальные условные знаки.
Горизонталь это замкнутая кривая линия, все точки которой имеют одинаковую высоту над уровнем море, кратную высоте сечения рельефа.
Высота сечения рельефа это кратчайшее расстояние между горизонталями по высоте. Кратчайшее расстояние между горизонталями в плане называется заложение.
Заложение имеет направление. Отношение высоты сечения к заложению называется уклоном местности, который тоже имеет направление. Горизонтали обычно изображаются коричневым цветом и имеют направление, которое указывается бергштрихами и положением надписи в разрыве линии. Голова цифр направлена в сторону возвышения рельефа. Для упрощения восприятия рельефа следует помнить, что чем гуще горизонтали, тем круче рельеф.
Для решения задач землеустройства и кадастра недвижимости требуется отображение на планах сельскохозяйственных угодий, растительности, границ землевладений и гидрографии. Эти вопросы решаются с помощью соответствующих условных знаков.
5.2. Теодолитная съёмка
Контурная или ситуационная съёмка, при которой положение снимаемых объектов определяется относительно сторон теодолитного хода называется теодолитной съёмкой . Каждая сторона теодолитного хода образует своеобразную систему координат – прямоугольную, полярную или биполярную. Началом отсчёта в такой системе должна быть младшая вершина теодолитного хода. При съёмке ситуации возможно использование одного из следующих способов [2, 3, 5, 7]:
· перпендикуляров,
· линейных засечек,
· угловых засечек,
· полярный способ,
· способ створов,
· способ обхода.
Горизонтальная съёмка обязательно должна сопровождаться абрисами.
Абрис – это схематичный чертёж местных предметов, выполненный в полевых условиях, с указанием размеров в соответствии со способами съёмки ситуации.
Способ перпендикуляров. Положение снимаемого пункта М относительно стороны теодолитного хода А-В определяется двумя взаимно перпендикулярными отрезками – абсциссой х и ординатой у (рис. 5.1,а). При этом следует помнить, что при глазомерном построении прямого угла длина ординаты не должна превышать 4… 6 м в зависимости от масштаба съёмки. Съёмку должны выполнять два человека, один из которых определяет створ линии хода, а другой измеряет абсциссу и ординату.
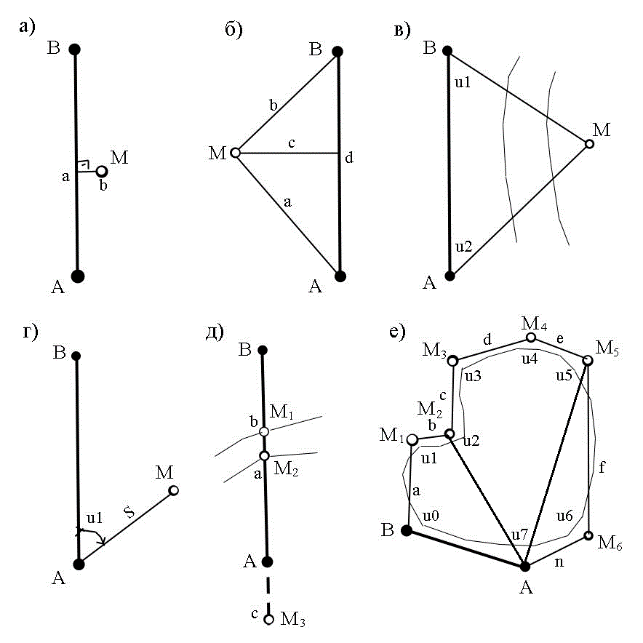
Рис. 5.1. Способы съёмки ситуации
Способ линейных засечек. Положение снимаемого пункта М относительно стороны теодолитного хода А-B определяется двумя отрезками a и b (рис. 5.1,б). По существу, это секция трилатерации. Для того чтобы повысить устойчивость системы, снять ограничения и исключить грубые ошибки рекомендуется измерить ещё два отрезка c и d. Для измерений можно использовать лазерный прибор как в отражательном, так и в безотражательном режимах.
Способ угловых засечек. Положение снимаемого пункта М относительно стороны теодолитного хода А –В определяется двумя горизонтальными углами u1 и u2 (рис. 5.1,в). Углы измеряются теодолитом полным приёмом. Значения углов должны быть не более 150° и не менее 30°. Удаление снимаемого пункта от стороны хода должно быть не более её длины.
Способ полярных координат. Положение снимаемого пункта М относительно стороны теодолитного хода А –B определяется полярными координатами – горизонтальным углом u1 и расстоянием S (рис. 5.1,г). Расстояние измеряется, как правило, нитяным дальномером, за исключение углов капитальных зданий, когда используется лазерный прибор.
Способ створов. Положение снимаемых пунктов М относительно створа вершин А и B теодолитного хода (или продолженного створа) определяется отрезками линий a, b, c, отсчитываемых от пункта А (рис. 5.1,д).
Способ обхода. Применяется при съёмке контуров со сложными очертаниями (например, береговой линии водоёма). По существу, это теодолитный ход, в котором нет уравнивания, а горизонтальные углы при вершинах измерены одним полуприёмом. Для обеспечения контроля следует предусматривать диагональные линии, измеряемые лазерным прибором (рис. 5.1,е).
5.3. Тахеометрическая съёмка
Греческое слово «tachys» означает быстрый, поэтому данный вид съёмки можно определить как быструю съёмку, при которой положение снимаемого пункта определяется одним наведением зрительной трубы на вертикально установленную рейку [3, 9]. Принцип определения положения – это пространственная полярная система координат. Полюсом является тахеометрическая станция, на которой устанавливается теодолит. Высотное положение станции определяется геометрическим нивелированием, а плановое так же, как пунктов теодолитного хода. На точку, подлежащую съёмке, устанавливается шашечная рейка, которая называется реечной точкой. Для определения планового положения снимаемой точки используется полярный способ горизонтальной съёмки, а для определения высотного её положения - тригонометрическое нивелирование.
Целью тахеометрической съёмки является получение топографического плана местности. На топографическом плане изображаются ситуация и рельеф.
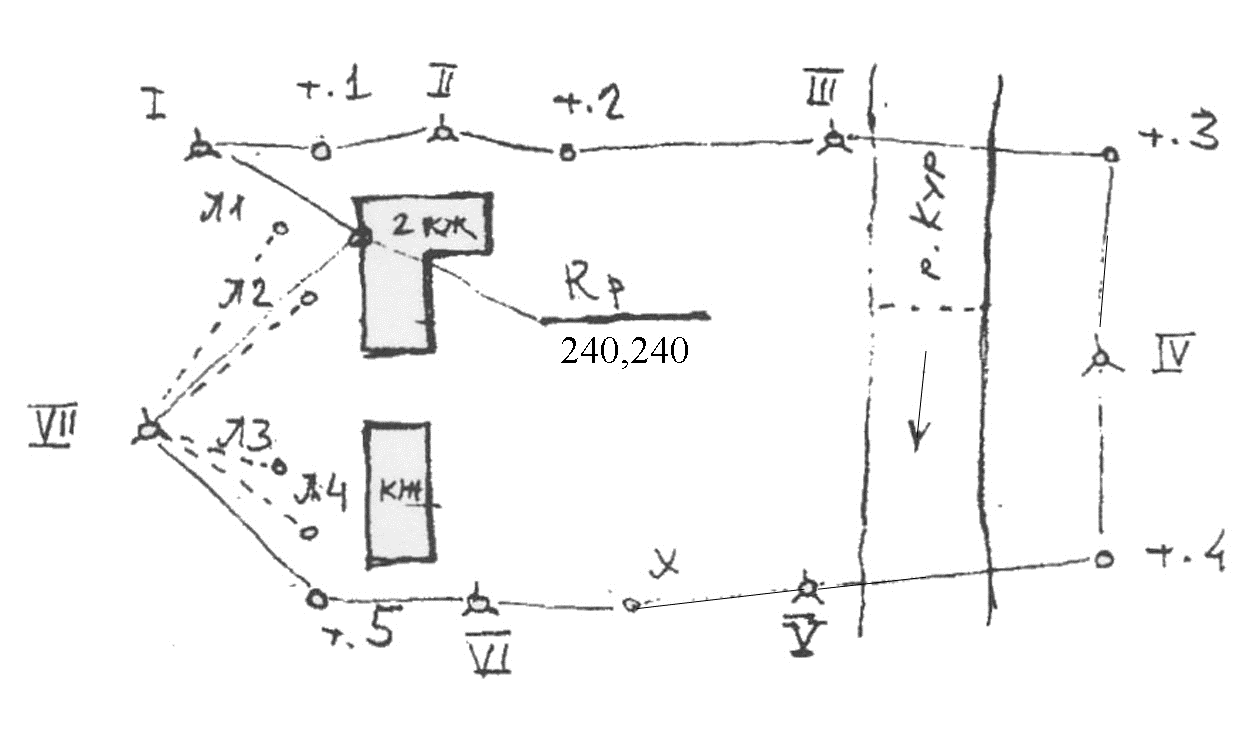
| Рис. 5.2. Кроки(абрисы) тахеометрической съёмки рельефа |
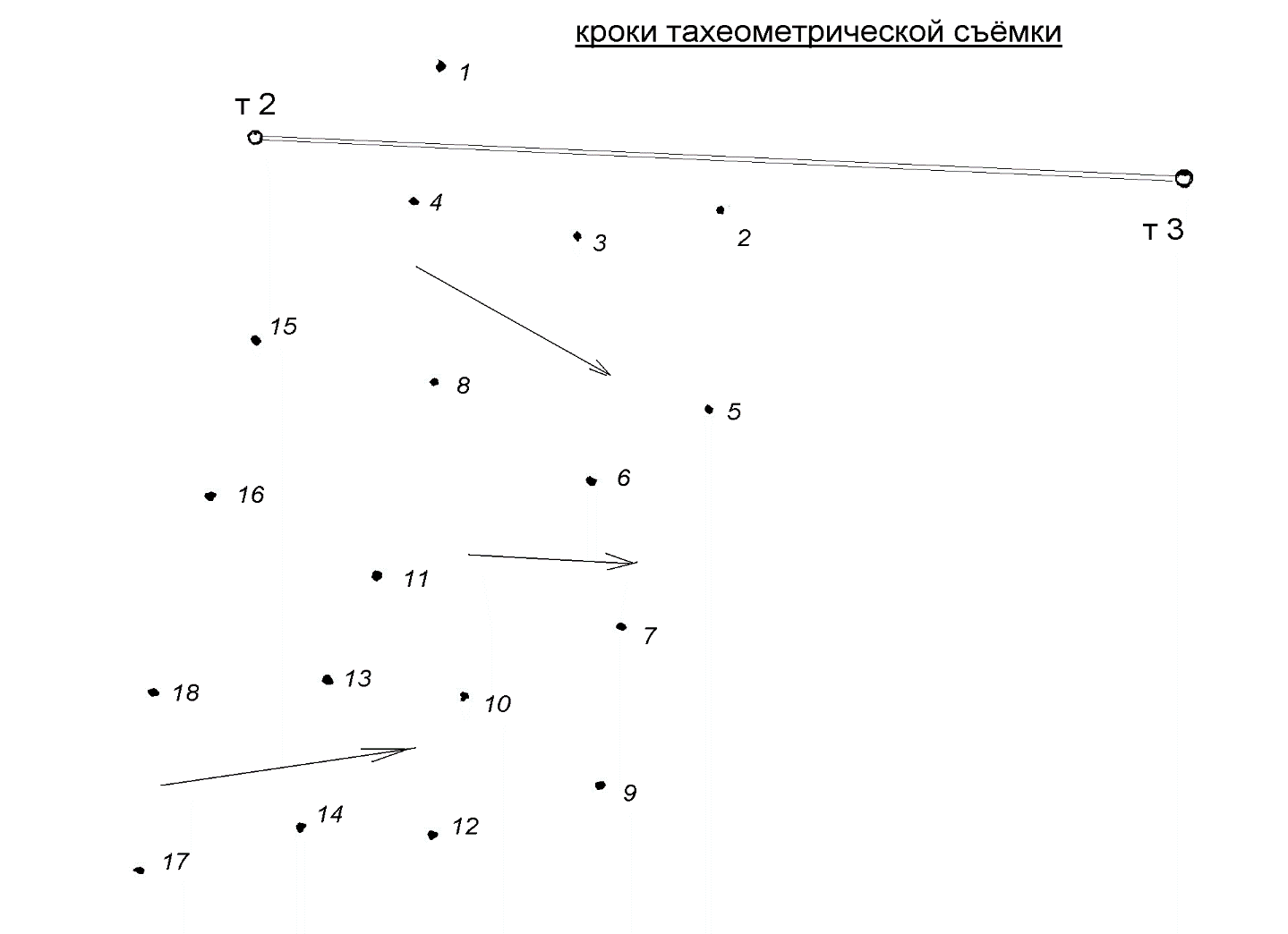 Быстрота съёмки имеет и свой недостаток. Рельеф как сложный объект съёмки должен быть в полевых условиях (в течение короткого времени) правильно осознан и адекватно отображен в полевых записях. Основной полевой документ тахеометрической съёмки – кроки (рис. 5.2), иногда по аналогии с теодолитной съёмкой его называют абрис. Это эскиз горизонтальной проекции снимаемого участка, на котором показаны пункты съёмочного обоснования, тахеометрическая станция, элементы ситуации, реечные точки, направления скатов местности, характерные точки и структурные линии рельефа. Вторым важным документом будет журнал тахеометрической съёмки (табл. 5.1). Заполнение журнала следует вести по стандартной форме, четко, без исправления записей и, как правило, карандашом. Для удобства ведения записи журнал и кроки должны иметь жесткую обложку.
Быстрота съёмки имеет и свой недостаток. Рельеф как сложный объект съёмки должен быть в полевых условиях (в течение короткого времени) правильно осознан и адекватно отображен в полевых записях. Основной полевой документ тахеометрической съёмки – кроки (рис. 5.2), иногда по аналогии с теодолитной съёмкой его называют абрис. Это эскиз горизонтальной проекции снимаемого участка, на котором показаны пункты съёмочного обоснования, тахеометрическая станция, элементы ситуации, реечные точки, направления скатов местности, характерные точки и структурные линии рельефа. Вторым важным документом будет журнал тахеометрической съёмки (табл. 5.1). Заполнение журнала следует вести по стандартной форме, четко, без исправления записей и, как правило, карандашом. Для удобства ведения записи журнал и кроки должны иметь жесткую обложку.
На каждой тахеометрической станции съёмочные операции выполняются в следующей последовательности:
1. Производится точное центрирование прибора над вершиной измеряемого угла и нивелирование горизонтального круга.
2. Ориентирование горизонтального круга осуществляется путём совмещения «0» лимба с «0» алидады и с некоторым направлением. Ориентирование круга сопровождается записью в журнале.
3. Измеряется и записывается в журнале высота прибора.
4. Определяется место нуля прибора и записывается в журнал.
5. Составляются кроки, на которых изображается всё, что необходимо, за исключением реечных точек.
6. Наблюдатель планирует и сообщает своему помощнику с рейкой места установки рейки, то есть реечные точки или, иначе, пикеты. Условия выбора реечных точек приведены в таблице 5.2.
7. Производится последовательная отработка всех реечных точек. Для каждой реечной точки наблюдатель производит наведение сетки нитей зрительной трубы на некоторую высоту «w» по рейке и записывает в журнале расстояние до реечной точки по дальномеру и отсчёты по горизонтальному и вертикальному кругу прибора. Реечник имеет возможность переходить на следующую точку после измерения расстояния, то есть в то время, когда производятся отсчёты по кругам прибора. Параллельно с записью в журнале номера точек отмечаются на кроки.
8. По завершению работы на станции производится контроль ориентирования горизонтального круга. Допускаемое отклонение составляет 1,5 минуты.
Использовать при работе на тахеометрической станции лазерный прибор не эффективно. Производительность труда с нитяным дальномером намного выше, точность его достаточная.
Однако при съемке контуров нельзя обойтись без внешних обмеров зданий и сооружений. Здесь лазерная рулетка будет незаменимым инструментом.
Как уже отмечалось, тахеометрическая съёмка не очень наглядная, поэтому глобальные контрольные промеры линий длиной 100…200 м могут упростить восприятие структуры ситуации и исключить грубые ошибки.
Таблица 5.1
ЖУРНАЛ
тахеометрической съёмки
станция _т2_; Нст = 104,75 м, i =1,55_м, МО= 0°01ʹ
| Рас-стоян. D, м | ГК | ВК | n | w | d tg n или 0,5D sin 2v | H ,м | |
| т3 т3 | 12,8 29,9 21,6 11,2 34,1 31,6 40,5 20,0 49,2 40,2 30,8 48,6 36,8 47,0 13,4 24,3 50,4 38,1 | 00°00¢ 335°50¢ 6 53 15 48 20 10 30 05 44 58 53 02 53 02 61 41 68 28 72 30 74 28 80 42 84 27 87 40 94 41 96 05 97 30 00°00¢ | -4°43,5¢ -4 17 -4 19 -5 30 -4 03,5 -3 36,5 -3 20 -3 45 -2 37 -2 27 -2 28 -1 42,5 -1 52,5 -1 07,5 -2 25 -1 22,5 -0 31 -0 37 | ______ -4°44,5ʹ ______ ______ ______ | ____ 1,06 _____ _____ ____ | _______ -1,05 _______ _______ _____ | _______ 104,19 _______ _______ _______ |
Таблица 5.2
Допускаемые расстояния при тахеометрической съёмке
| Масштабы | Высота сечения рельефа | Не долее между пикетами, м | Не более до пикета, м | |
| рельеф | ситуация | |||
| 1: 1000 | 0,5 1,0 | |||
| 1: 500 | 0,5 1,0 |
По окончании работы на каждой станции обязательно производится контроль ориентирования. Погрешность замыкания горизонта не должна быть более 1 минуты.
Дата добавления: 2016-01-03; просмотров: 2365;