Режимы работы таймеров
Общие сведения
Любой микроконтроллер серии AVR содержит несколько встроенных таймеров. Причем по своему назначению их можно разделить на две категории. К первой категории относятся таймеры общего назначения. Вторую категорию составляет сторожевой таймер. Сторожевой таймер предназначен для автоматического перезапуска микроконтроллера в случае «зависания» его программы.
Это полезно запомнить.Зависанием называют зацикливание программы в результате ошибки, допущенной программистом, либо в результате действия внешней помехи.
Для каждой микросхемы нужен всего один сторожевой таймер. В любом микроконтроллере AVR такой таймер имеется.
Таймеры общего назначения используются для формирования различных интервалов времени и прямоугольных импульсов заданной частоты. Кроме того, они могут работать в режиме счетчика и подсчитывать тактовые импульсы заданной частоты, измеряя таким образом длительность внешних сигналов, а также при необходимости подсчитывать количество любых внешних импульсов.
По этой причине данные таймеры называют «таймеры/счетчики».В микросхемах AVR применяются как восьмиразрядные, так и шестнадцатиразрядные таймеры/счетчики. Их количество для разных микроконтроллеров изменяется от одного до четырех. Точное количество таймеров/счетчиков для каждой микросхемы серии AVR можно определить из табл. 3.1(графа «Таймеры 8/16 бит»). Все таймеры обозначаютсячислами от 0 до 3.
Пример. Timer/Counter0, Timer/Counter1 и т.д. В русскоязычной литературе их чаще именуют сокращенно Т0, Т1,Т2, ТЗ. Таймеры Т0 иТ2 в большинстве микроконтроллеров — восьмиразрядные. Таймеры Т1 и ТЗ — шестнадцатиразрядные. Таймер Т0 имеется в любой микросхеме AVR. Остальные добавляются по мере усложнения модели.
Каждый восьмиразрядный таймер представляет собой один восьмиразрядный регистр, который для микроконтроллера является регистром ввода-вывода. Этот регистр хранит текущее значение таймера и называется счетным регистром. Шестнадцатиразрядные таймеры имеют шестнадцатиразрядный счетный регистр.Каждый счетный регистр имеет свое имя.
Счетный регистр восьмиразрядного таймера именуется TCNTx, где «х» — это номер таймера Для таймера Т0 регистр называется TCNT0. Для таймера Т2 — TCNT2. Шестнадцатиразрядные регистры именуются похожим образом. Отличие в том, что каждый шестнадцатиразрядный счетный регистр для микроконтроллера представляет собой два регистра ввода-вывода.
Один предназначен для хранения старших битов числа, а второй — для хранения младших битов. К имени регистра старших разрядов добавляется буква Н, а для регистра младших разрядов добавляется буква L. Таким образом, счетный регистр таймера Т1 — это два регистра ввода-вывода: TCNT1H и TCNT1L. Счетный регистр таймера ТЗ — это два регистра TCNT3H и TCNT3L.
Микроконтроллер может записать в любой счетный регистр любое число в любой момент времени, а также в любой момент прочитать содержимое любого счетного регистра. Когда таймер включается в режим счета, то на его вход начинают поступать счетные импульсы. После прихода каждого такого импульса содержимое счетного регистра увеличивается на единицу. Счетными импульсами могут служить как специальные тактовые импульсы, вырабатываемые внутри самого микроконтроллера, так и внешние импульсы, поступающие на специальные входы микросхемы. При переполнении счетного регистра его содержимое обнуляется, и счет начинается сначала.
Любой таймер жестко завязан с системой прерываний. Вызвать прерывание может целый ряд событий, связанных с таймером. Например, существует прерывание по переполнению таймера, по срабатыванию специальной схемы совпадения. Отдельные прерывания может вызывать сторожевой таймер.
Режимы работы таймеров
Таймеры микроконтроллеров семейства AVR могут работать в нескольких режимах. Разные микроконтроллеры имеют разные наборы режимов для своих таймеров. Для выбора режимов работы существуют специальные регистры — регистры управления таймерами. Для простых таймеров используется один регистр управления. Для более сложных — два регистра. Регистры управления таймером называются TCCRx (где «х» — номер таймера). Например, для таймера Т0 используется один регистр с именем TCCR0. Для управления таймером Т1 используется два регистра: TCCR1А и TCCR1B. При помощи регистров управления производится не только выбор соответствующего режима, но и более тонкая настройка таймера. Ниже перечислены все основные режимы работы таймера и их описание.
Режим Normal
Это самый простой режим. В этом режиме таймер производит подсчет приходящих на его вход импульсов (от тактового генератора или внешнего устройства) и вызывает прерывание по переполнению. Этот режим является единственным режимом работы для восьмиразрядных таймеров большинства микроконтроллеров семейства «Tiny» и для части микроконтроллеров семейства «Mega». Для всех остальных восьмиразрядных и всех шестнадцатиразрядных таймеров это всего лишь один из возможных режимов.
Режим «Захват» (Capture)
Суть этого режима заключается в сохранении содержимого счетного регистра таймера в определенный момент времени. Запоминание происходит либо по сигналу, поступающему через специальный вход микроконтроллера, либо от сигнала с выхода встроенного компаратора.
Этот режим удобен в том случае, когда нужно измерить длительность какого-либо внешнего процесса. Напримервремя, за которое напряжение на конденсаторе достигнет определенного значения. В этом случае напряжение с конденсатора подается на один из входов компаратора, а на второй его вход подается опорное напряжение.
Микроконтроллер должен одновременно запустить два этих процесса: подать напряжение на конденсатор; запустить таймер в режиме Capture.
Конденсатор начнет заряжаться, напряжение на нем при этом будет плавно расти. Одновременно счетчик таймера будет отсчитывать тактовые импульсы заданной частоты. В тот момент, когда напряжение на конденсаторе сравняется с опорным напряжением, логический уровень на выходе компаратора изменится на противоположный. По этому сигналу текущее значение счетного регистра запоминается в специальном регистре захвата.Имя этого регистра ICRx (для таймера Т0 это будет ICR0, для Tl — ICR1 и т. д.). Одновременно вырабатывается запрос на прерывание.
Используя принцип измерения времени зарядки, удобно создавать простые схемы, работающие с различными аналоговыми датчиками (температуры, давления и т. д.). Если принцип работы датчика состоит в изменении его внутреннего сопротивления, то такой датчик можно включить в цепь зарядки конденсатора. Емкостные датчики можно подключать напрямую.
Режим «Сброс при совпадении» (СТС)
Для работы в режиме СТС используется специальный регистр — регистрсовпадения. Если микроконтроллер содержит несколько таймеров, то для каждого из них существует свой отдельный регистр совпадения. Причем для восьмиразрядных таймеров регистр совпадения — это один восьмиразрядный регистр. Для шестнадцатиразрядных таймеров регистр совпадения — это два восьмиразрядных регистра.
Регистры сравнения также имеют свои имена. Например, регистр совпадения таймера Т1 состоит из двух регистров: OCR1L и OCR1H. В ряде микроконтроллеров существуют два регистра совпадения. Так, во всех микроконтроллерах семейства «Tiny» существует два регистра совпадения для таймера Т1. Это регистры OCR1A и OCR1B. Два регистра совпадения для таймера Т1 имеет и микроконтроллер ATmega8x. Во втором случае как таймер, так и его регистры совпадения имеют шестнадцать разрядов.
Если регистр совпадения шестнадцатиразрядный, то физически он состоят из двух регистров ввода-вывода. Например,два регистра совпадения таймера Т1 микросхемы ATmega8x представляют собой четыре регистра ввода-вывода с именами OCR1AL, OCR1AH, OCR1BL, OCR1BH.
Как же используются регистры совпадения? Эти регистры включаются в работу только тогда, когда выбран режим СТС. В этом режиме, как и в предыдущем, таймер производит подсчет входных импульсов. Текущее значение таймера из его счетного регистра постоянно сравнивается с содержимым регистров совпадения.
Если таймер имеет два регистра совпадения, то для каждого из этих регистров производится отдельное сравнение. Когда содержимое счетного регистра совпадет с содержимым одного из регистров совпадения, произойдет вызов соответствующего прерывания. Кроме вызова прерывания, в момент совпадения может происходить одно из следующих событий:
♦ сброс таймера (верно только для регистров совпадения OCR1 и OCR1A);
♦ изменение состояния одного из выводов микроконтроллера (верно для всех регистров).
Произойдет или не произойдет одно или оба события из вышеперечисленных, определяется при настройке таймера.
Режим «Быстродействующий ШИМ» (Fast PWM)
Это полезно запомнить. ШИМ — расшифровывается как Широтно-Импульсная Модуляция. На английском это звучит как «Pulse Width Modulation» (PWM). Сигнал с ШИМ часто используется в устройствах управления.
Сигнал с ШИМ можно, например,использовать для регулировки скорости вращения электродвигателя постоянного тока. Для этого вместо постоянного напряжения на двигатель подается прямоугольное импульсное напряжение. Благодаря инерции двигателя импульсы сглаживаются, и двигатель вращается равномерно. Меняя скважность импульсов (то есть отношение периода импульсов к их длительности), можно изменять среднее напряжение, приложенное к двигателю и, тем самым, менять скорость его вращения.
Точно таким же образом можно управлять и другими устройствами. Например, нагревательными элементами, осветительными приборами и т. п. Преимущество импульсного управления — в высоком КПД.
Импульсные управляющие элементы рассеивают гораздо меньше паразитной мощности, чем управляющие элементы, работающие в аналоговом режиме.
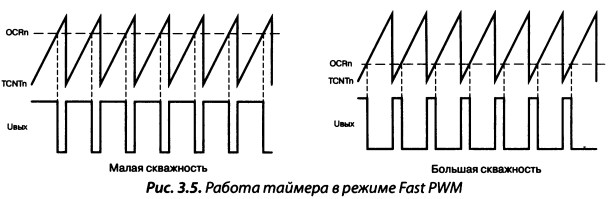
Для формирования сигнала ШИМ используются те же самые регистры совпадения, которые работают и в режиме СТС. Формирование сигнала ШИМ может осуществляться несколькими разными способами. Работа таймера в режиме Fast PWM проиллюстрирована на рис. 3.5.
Сигнал с ШИМ формируется на специальном выходе микроконтроллера. На вход таймера подаются импульсы от системного генератора. Таймер находится в состоянии непрерывного счета. При переполнении таймера его содержимое сбрасывается в ноль, и счет начинается сначала. В режиме ШИМ переполнение таймера не вызывает прерываний. На рис. 3.5 это показано в виде пилообразной кривой, обозначенной как TCNTn. Кривая представляет собой зависимость содержимого счетного регистра от времени.
Содержимое счетного регистра непрерывно сравнивается с содержимым регистра совпадения. Пока число в регистре OCRn больше, чем число в счетном регистре таймера (TCNTn), напряжение на выходе ШИМ равно логической единице. Когда же в процессе счета содержимое счетного регистра TCNTn станет больше содержимого OCRn, на выходе ШИМ установится нулевой потенциал.
В результате на выходе мы получим прямоугольные импульсы. Скважность этих импульсов будет зависеть от содержимого регистра OCRn. Чем меньше число в OCRn, тем выше скважность выходных импульсов. На рис. 3.5 показана скважность импульсов для двух разных значений регистра OCRn.
Если содержимое OCRn достигнет своего максимального значения, то импульсы на выходе ШИМ исчезнут, и там постоянно будет присутствовать логическая единица. При уменьшении числа в OCRn появятся импульсы малой скважности (длительность почти равна периоду). Если плавно уменьшать число в OCRn, то скважность будет плавно уменьшаться. Когда содержимое OCRn достигнет нуля, импульсы на выходе ШИМ также исчезнут, и там установится логический ноль.
Режим «ШИМ с точной фазой» (Phase Correct PWM)
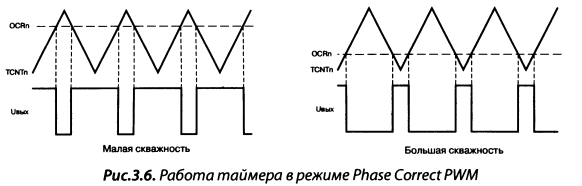
Описанный в предыдущем разделе режим ШИМ имеет один недостаток. При изменении длительности импульсов меняется и их фаза. Центр каждого импульса как бы сдвигается во времени. При управлении электродвигателем такое поведение фазы нежелательно. Поэтому в микроконтроллерах AVR предусмотрен еще один режим ШИМ. Это ШИМ с точной фазой. Принцип работы таймера в этом режиме изображен на рис. 3.6.
Отличие режима «Phase Correct PWM» от режима «Fast PWM» заключается в режиме работы счетчика. Сначала счетчик считает так же, как и в предыдущем режиме (от каждого входного импульса его значение увеличивается на единицу). Достигнув своего максимального значения, счетчик не сбрасывается в ноль, а переключается в режим реверсивного счета.
Теперь уже от каждого входного импульса его содержимое уменьшается на единицу. В результате пилообразная кривая, отображающая содержимое счетного регистра TCNTn, становится симметричной, как показано на рис. 3.6. Система совпадения работает так же, как и в предыдущем случае.
Благодаря симметричности сигнала на таймере, фаза выходных. импульсов в процессе регулировки скважности не изменяется. Середина каждого импульса строго привязана к точке смены направления счета таймера.
Недостатком режима «Phase Correct PWM» можно считать в два раза меньшую частоту выходного сигнала. Это существенно уменьшает динамичность регулирования. Кроме того, при использовании внешних фильтров для преобразования импульсного сигнала ШИМ в аналоговый, схема с более низкой частотой потребует применения комплектующих с большими габаритами и массой.
Асинхронный режим
В некоторых моделях микроконтроллеров таймер может работать в асинхронном режиме. В этом режиме на вход таймера подается либо частота от внутреннего кварцевого генератора, либо от внешнего генератора. Счетчик не вырабатывает никаких прерываний и дополнительных сигналов. В этом режиме он работает в качестве часов реального времени. Микроконтроллер может предустанавливать содержимое счетного регистра. А затем в любой момент он может считать это содержимое, получив, таким образом, текущее значение реального времени.
Дата добавления: 2017-10-09; просмотров: 8419;