СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
При описании процесса автоматического управления реальный объект представляют обычно в виде двух систем: управляющей и управляемой (объекта управления).
Структура САУ:
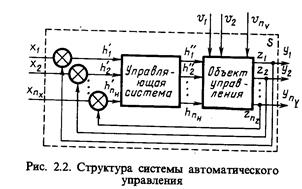
где эндогенные переменные:
 - векторы вх воздействий;
- векторы вх воздействий;
 - векторы возмущающих воздействий;
- векторы возмущающих воздействий;
 - векторы сигналов ошибки;
- векторы сигналов ошибки;
 - векторы управляющих воздействий.
- векторы управляющих воздействий.
Экзогенные переменные:
 - вектор состояния системы
- вектор состояния системы  ;
;
 - вектор выходных переменных (обычно
- вектор выходных переменных (обычно  ).
).
Для одномерной системы ошибка управления системы  , где
, где  - заданный закон изменения управляемой величины системы;
- заданный закон изменения управляемой величины системы;  - действительный закон изменения.
- действительный закон изменения.
Если предписанный закон изменения управляемой величины соответствует закону изменения входного воздействия, т.е.  (при условии линейной зависимости
(при условии линейной зависимости  и
и  ).
).
Система управления называется идеальной, если  во все моменты времени. На практике это не возможно. Таким образом, ошибка
во все моменты времени. На практике это не возможно. Таким образом, ошибка  - неизбежная составляющая объекта автоматического управления, основанного на принципе отрицательной обратной связи. Т.к. для приведения в соответствие выходной переменной её заданному значению используется информация об отклонениями между ними.
- неизбежная составляющая объекта автоматического управления, основанного на принципе отрицательной обратной связи. Т.к. для приведения в соответствие выходной переменной её заданному значению используется информация об отклонениями между ними.
Задачей системы авт. управления является изменение переменной  согласно заданному закону с определенной точностью (с допустимой ошибкой). При проектировании и эксплуатации систем авт. управления необходимо выбрать такие параметры системы
согласно заданному закону с определенной точностью (с допустимой ошибкой). При проектировании и эксплуатации систем авт. управления необходимо выбрать такие параметры системы  , которые обеспечили бы требуемую точность управления, а также устойчивость системы в переходном процессе.
, которые обеспечили бы требуемую точность управления, а также устойчивость системы в переходном процессе.
Если система устойчива, то представляют практический интерес поведение системы во времени, максимальное отклонение регулируемой переменной в переходном процессе, время переходного процесса, граничные условия.
Свойства систем автоматического управления различных классов можно смоделировать с помощью дифференциальных уравнений и их коэффициентов. Порядок дифференциального уравнения и значения его коэффициентов полностью определяются статическими и динамическими параметрами системы .
Пример:
Рассмотрим одноканальную систему автоматического управления SA, которая описывается  -схемой общего вида:
-схемой общего вида:
 , (1)
, (1)
где  ;
; 
Пусть система SA, работает в некотором режиме малых отклонений от  и
и  , т.е.
, т.е.  и
и  .
.
Тогда уравнение (1) можно линеаризовать, разложив функцию  в ряд Тейлора и ограничиться его линейными членами относительно приращений
в ряд Тейлора и ограничиться его линейными членами относительно приращений  и
и  , т.е.:
, т.е.:
 (2)
(2)
Т.к. уравнение (2) приблизительно описывает рассматриваемый процесс, то производные вычисляются при некоторых фиксированных значениях входящих в него переменных, т.е. мы получаем системы с постоянными коэффициентами.
Уравнения получаются линейными относительно и  и их производных.
и их производных.
Методы решения и исследования линейной системы значительно проще, чем общего вида. Таким образом:
 (3)
(3)
В уравнении (3) для простоты предполагается, что точка приложения возмущающих воздействий совпадает с входом системы (т.е. совпадает с начальной точкой). Решить это уравнение можно, например, операторным методом, значения ДУ алгебраическим (метод конечных разностей).
Таким образом, использование Д-схем позволяет формализовывать процесс функционирования непрерывно-детерминированных систем S и оценить их основные характеристики, применяя аналитический или имитационный подход.
12. ДИСКРЕТНО-ДЕТЕРМИНИРОВАННЫЕ МОДЕЛИ (F-МОДЕЛИ)
Автомат можно представить как некоторое устройство, на которое подаются входные сигналы и снимаются выходные и которое может иметь некоторые внутренние состояния. Конечным автоматом называется автомат, у которого множество внутренних состояний и входных сигналов (а следовательно, и множество выходных сигналов) являются конечными множествами.
Абстрактно конечный автомат можно представить как математическую схему (F-схему), характеризующуюся шестью элементами:
1) конечным множеством X входных сигналов (входным алфавитом);
2) конечным множеством Y выходных сигналов (выходным алфавитом);
3) конечным множеством Z внутренних состояний (внутренним алфавитом или алфавитом состояний);
4) начальным состоянием  ;
;
5) функцией переходов  ;
;
6) функцией выходов  .
.
Автомат, задаваемый F-схемой:  — функционирует в дискретном времени, такты, каждому из которых соответствуют постоянные значения входного и выходного сигналов и внутренние состояния.
— функционирует в дискретном времени, такты, каждому из которых соответствуют постоянные значения входного и выходного сигналов и внутренние состояния.
Обозначим состояние, а также входной и выходной сигналы, соответствующие такту  через
через  , , . При этом, по условию
, , . При этом, по условию  ,
,  ,
,  ,
,  .
.
Абстрактный конечный автомат имеет один входной и один выходной каналы. В каждый момент дискретного времени F-автомат находится в определенном состоянии состояний автомата, причем в начальный момент времени  он всегда находится в начальном состоянии
он всегда находится в начальном состоянии  . В момент
. В момент  , будучи в состоянии z(t), автомат способен воспринять на входном канале сигнал и выдать на выходном канале сигнал
, будучи в состоянии z(t), автомат способен воспринять на входном канале сигнал и выдать на выходном канале сигнал  , переходя в состояние
, переходя в состояние  .
.
Если  ,
,  ,
,  … - это входное, то
… - это входное, то  ,
,  ,
,  … - выходное слово.
… - выходное слово.
Таким образом, работа конечного автомата происходит по следующей схеме: в каждом такте на вход автомата, находящегося в состоянии z(t), подается некоторый сигнал x(t), на который он реагирует переходом в  такте в новое состояние
такте в новое состояние  с выдачей некоторого выходного сигнала.
с выдачей некоторого выходного сигнала.
Получаем:
Для F-автомата первого рода (автомат Мили):



для F-автомата второго рода

Автомат второго рода, для которого  , , т.е. функция выходов не зависит от входной переменной
, , т.е. функция выходов не зависит от входной переменной  , называется автоматом Мура.
, называется автоматом Мура.
По числу состояний различают:
1) конечные автоматы с памятью
2) автоматы без памяти
По характеру отсчета дискретного времени конечные автоматы делятся на:
1) синхронные.
2) асинхронные - считывает входной сигнал непрерывно,
Чтобы задать конечный F-автомат, необходимо описать все элементы множества:
 . При чем необходимо выделить
. При чем необходимо выделить  в момент
в момент  Существует несколько способов задания работы F-автомата, но наиболее часто используют табличный способ.
Существует несколько способов задания работы F-автомата, но наиболее часто используют табличный способ.
Табличный способ:
Строки соответствуют входным сигналам автомата, столбцы – его состояниям. Обычно первый слева столбец соответствует начальному состоянию z0 . На пересечении i-ой строки и k-го столбца таблицы переходов помещается соответствующее значение  функции переходов, а в таблице выходов – соответствующее значение
функции переходов, а в таблице выходов – соответствующее значение  функции выходов.
функции выходов.
Для F-автоматов Мура обе таблицы можно совместить, получая отмеченную таблицу переходов, в которой над каждым состоянием  автомата, обозначающим столбец таблицы, стоит соответствующий этому состоянию выходной сигнал
автомата, обозначающим столбец таблицы, стоит соответствующий этому состоянию выходной сигнал  .
.
Таблица 1
|
| ||

| 
| ... 
| |
| ПЕРЕХОДЫ | |||

| 
| 
| ... 
|

| 
| 
| ... 
|
| ... | ... | ... | ... |

| 
| 
| ... 
|
| ВЫХОДЫ | |||
|
| 
| 
| ...
|
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ КОНЕЧНОГО АВТОМАТА, ЗАДАННОГО НАПРАВЛЕННЫМ ГРАФОМ
Граф автомата представляет собой набор вершин, соответствующих различным состояниям автомата и соединяющих вершины дуг графа, соответствующих тем или иным переходам автомата. Для автомата Мура аналогичная разметка графа такова: если входной сигнал xk,действуя на некоторое состояние автомата, вызывает переход в состояние zj то дугу, направленную в zj и помеченную xk,дополнительно отмечают выходным сигналом у = y (zj, xk).
Таблица 2
| xi | zk | ||
| z0 | z1 | z2 | |
| Переходы | |||
| x1 | z2 | z0 | z0 |
| x2 | z0 | z2 | z1 |
| Выходы | |||
| x1 | y1 | y1 | y2 |
| x2 | y1 | y2 | y1 |
Таблица 3
| xi | y | ||||
| y1 | y1 | y3 | y2 | y3 | |
| z0 | z1 | z2 | z3 | z4 | |
| x1 | z1 | z4 | z4 | z2 | z2 |
| x2 | z3 | z1 | z1 | z0 | z0 |
На рис. 3, а, б приведены заданные ранее таблицами F-автоматы Мили F1 и Мура F2 соответственно.
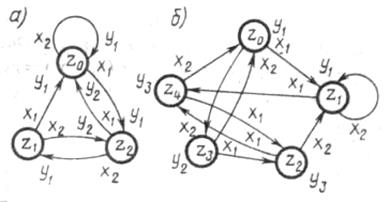
Рис. 3. Графы автоматов Мили (а) и Мура (6)
При решении задач моделирования систем часто более удобной формой является матричное задание конечного автомата. При этом матрица соединений автомата есть квадратная матрица С= ||сij||, строки которой соответствуют исходным состояниям, а столбцы — состояниям перехода. Элемент cij = xk / ys,стоящий на пересечении i-й строки и j-го столбца, в случае автомата Мили соответствует входному сигналу xk,вызывающему переход из состояния zi в состояние zj,и выходному сигналу ys,вы даваемому при этом переходе. Для автомата Мили F1 матрица соединений имеет вид
 .
.
Если переход из состояния zi в состояние zj происходит под действием нескольких сигналов, элемент матрицы cij представляет собой множество пар «вход-выход» для этого перехода, соединенных знаком дизъюнкции.
Для F-автомата Мура элемент cij равен множеству входных сигналов на переходе (zi, zj), а выход описывается вектором выходов
i-я компонента которого — выходной сигнал, отмечающий состояние zi.
Дата добавления: 2017-09-19; просмотров: 387;