Определение коэффициента передачи ТП по напряжению
При синусоидальном опорном напряжении СИФУ преобразователя характеристика вход-выход ТП линейная и коэффициент передачи ТП рассчитывается по формуле:

где UУ.МАКС – максимальное управляющее напряжение ТП, обычно принимают UУ.МАКС = 10 В.
Коэффициент передачи СИФУ
 (4.2)
(4.2)
Строим регулировочную характеристику БВ на холостом ходу
Определяем коэффициент передачи БВ:
где DEd определяется по графику при значении Da » 30°.
Тогда общий коэффициент передачи ТП:

Постоянная времени ТП:
 (4.6)
(4.6)
где TФ – постоянная времени фильтра, установленного на входе СИФУ при совместном согласованном управлении, TФ = 6…8 мс;
TС.З. – среднестатистическое запаздывание, присущее ТП как звену запаздывания,
Принимаем TФ= 7 мс.
 с (4.7)
с (4.7)
Итого получаем TП» 8…10 мс.
Примечание. При раздельном управлении дополнительный фильтр на входе СИФУ не устанавливается, поэтому в данном случае теоретически TП = TС.З., однако из-за наличия в ТП и вообще в системе малых неучтенных инерционностей, обычно принимают TП» 5мс.
Эквивалентное активное сопротивление системы якорной цепи системы
ТП-Д:

Электромагнитная постоянная времени системы ТП-Д:



Электромеханическая постоянная времени системы ТП-Д:

где  - суммарный момент инерции, приведенный к валу электродвигателя, состоит из момента инерции двигателя JДВ и механизма JМЕХ. Если JМЕХ не задан, то его можно принять JМЕХ» (0,25…0,5)JДВ.
- суммарный момент инерции, приведенный к валу электродвигателя, состоит из момента инерции двигателя JДВ и механизма JМЕХ. Если JМЕХ не задан, то его можно принять JМЕХ» (0,25…0,5)JДВ.
Структурная схема системы ТП-Д имеет вид:
Рисунок 4.3 – Структурная схема системы ТП-Д
Из структурных схем отдельных регуляторов составляем общую структурную схему системы подчиненного регулирования.
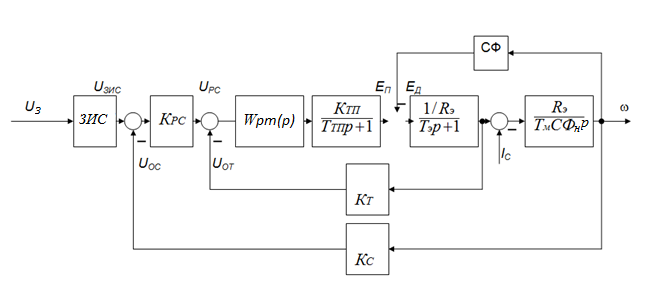
Рисунок 4.4 – Структурная схема системы подчиненного регулирования
4.2 Расчет регулятора тока
На рисунке 4.5 представлена структурная схема контура тока.
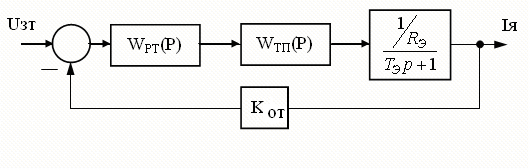
Рисунок 4.5 – Структурная схема контура тока
В данном дипломном проекте более целесообразно настроить контур тока на модульный оптимум, так как Sc ≤ 5%.
Передаточная функция регулятора тока при оптимизации контура на модульный оптимум будет иметь вид:
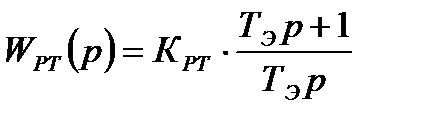 (4.15)
(4.15)
где  электромагнитная постоянная времени системы ТП-Д;
электромагнитная постоянная времени системы ТП-Д;
Как видно из формулы регулятор тока – ПИ регулятор.
Статический коэффициенты усиления регулятора тока:
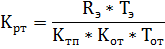
 ;
;
где  коэффициент передачи цепи обратной связи по току с учётом что:
коэффициент передачи цепи обратной связи по току с учётом что:
- максимальный сигнал задания на ток  ;
;
- максимально допустимый ток якоря двигателя
На рисунке 4.7 представлена структурная схема регулятора тока.
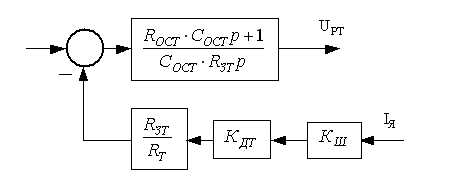
Рисунок 4.7 – Структурная схема регулятора тока
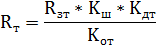
Рассчитываем элементы функциональной схемы регулятора тока по следующим соотношениям:
где -  принимаем
принимаем 
В качестве шунта RS выбираем шунт типа 75ШСМ, имеющий следующие параметры: Uн=75 мВ, Iн=4000 А.

Коэффициент передачи датчика тока:

где  коэффициент передачи цепи обратной связи по току;
коэффициент передачи цепи обратной связи по току;
В качестве стандартного датчика тока выбираем датчик фирмы TВЕЛЕМ-LEM HAX1500-S.
Этот датчик предназначен для формирования и ввода в систему регулирования аналогового сигнала, пропорционального току в цепи якоря. Датчик подключается к шунту в цепи якоря двигателя и обеспечивает гальваническую развязку между входными и выходными цепями с разностью потенциалов между ними до 1000 В.
Параметры датчика HAX1500-S:
- выходное напряжение  15 В;
15 В;
- коэффициент усиления 50¸125;
- погрешность  1%;
1%;
- полоса пропускания 1.5 кГц;
- напряжение питания постоянным током 15 В.
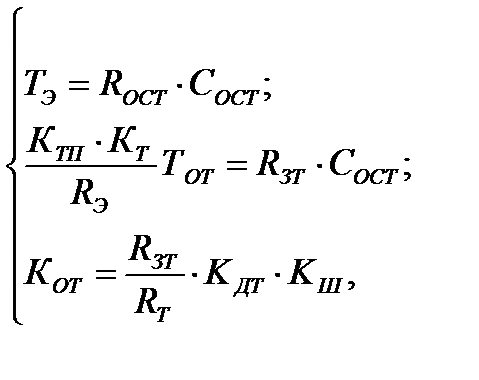
Принимаем конденсатор Сост емкостью 1 мкФ.

где  коэффициента передачи ТП по напряжению;
коэффициента передачи ТП по напряжению;
;
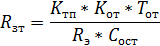
где  сопротивление задатчика тока;
сопротивление задатчика тока;
 коэффициент передачи шунта;
коэффициент передачи шунта;
 коэффициент передачи датчика тока;
коэффициент передачи датчика тока;
4.3 Расчёт регулятора скорости
В контур регулирования скорости входит: объект управления, состоящий из оптимизированного контура тока и механической части электропривода; датчик скорости; регулятор скорости.
Таким образом, на рисунке 4.8 представлена структурная схема регулятора скорости.
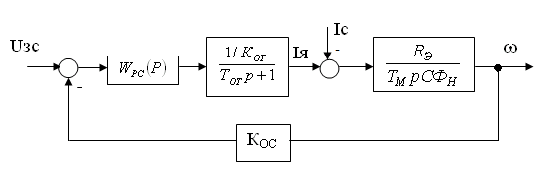
Рисунок 4.8 – Структурная схема регулятора скорости
Согласно заданию, требуется обеспечить статическую ошибку регулирования в пределах 5%. Применение пропорционального регулятора скорости обеспечивает статизм:
где  номинальный ток двигателей;
номинальный ток двигателей;
 потокосцепление двигателей;
потокосцепление двигателей;
 электромеханическая постоянная времени системы ТП-Д;
электромеханическая постоянная времени системы ТП-Д;
Следовательно, статизм находится в пределах 5%, что возможно применение П-регулятора.
Передаточная функция регулятора скорости при оптимизации контура на модульный оптимум будет иметь вид:
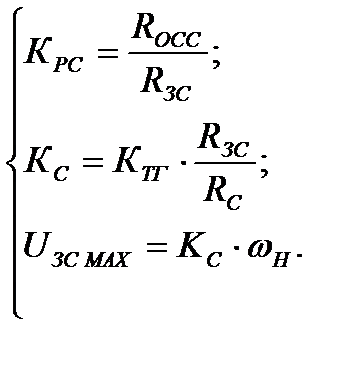
Статический коэффициент усиления регулятора скорости:
где КОС – коэффициент обратной связи по скорости;
ТОС = 4Тm = 0,02 с – постоянная времени интегрирования контура скорости;
- коэффициент передачи цепи обратной связи по скорости с учётом что:
- максимальный сигнал задания на скорость ;
- 
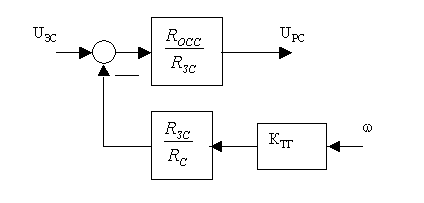
Рисунок 4.10 – Структурная схема регулятора скорости
В качестве датчика скорости выбираем тахогенератор типа ТП 214 [6]:
Рассчитываем элементы функциональной схемы регулятора скорости по следующим соотношениям:

 (4.28)
(4.28)
Задание на скорость подаем с задатчика интенсивности скорости.
Поэтому задаемся  . В качестве
. В качестве  выбираем резистор типа МЛТ-0,125 сопротивлением 2.4 кОм [3].
выбираем резистор типа МЛТ-0,125 сопротивлением 2.4 кОм [3].
Рассчитаем  :
:
Выбираем резистор  типа МЛТ-0.125, 150 кОм.
типа МЛТ-0.125, 150 кОм.
Рассчитаем  :
:
Выбираем резистор типа МЛТ-0.125 27 кОм [6].
Выбираем стабилитрон VD типа КС 210Б [6]:
4.4 Расчет задатчика интенсивности скорости
Для разгона и торможения двигателя с динамическим током, меньшим уставки токоограничения (IМАКС=2,5 IН) применяем задатчик интенсивности, преобразующий ступенчатый сигнал задания скорости в линейно изменяющийся во времени. Установившееся значение напряжения выхода задатчика интенсивности, которое подаётся на вход регулятора скорости, равно входному сигналу. То есть задатчик интенсивности скорости необходим для ограничения тока двигателя в переходных процессах.
Структурная схема задатчика интенсивности скорости приведена на рисунке 4.11.
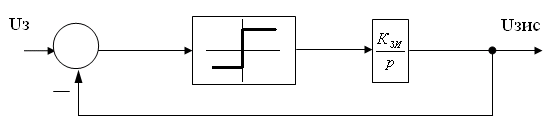
Рисунок 4.11 – Структурная схема задатчика интенсивности скорости
Считаем, что электропривод разгоняется до номинальной скорости, то есть  , тогда время разгона:
, тогда время разгона:
Коэффициент передачи ЗИС:
На рисунке 4.12 представлена функциональная схема задатчика интенсивности скорости.
Принимаем конденсатор  емкостью 2 мкФ.
емкостью 2 мкФ.
Принимаем:
R11 = R12 = 20 кОм;
R21 = R22 = 10 кОм.
Дата добавления: 2017-04-20; просмотров: 1718;