Технические средства и основные элементы маневровой работы
ТЕХНОЛОГИЯ, УПРАВЛЕНИЕ, НОРМИРОВАНИЕ МАНЕВРОВОЙ РАБОТЫ
Виды и классификация маневровой работы
Маневрами называются всякие перемещения локомотивов вхолостую (без вагонов) или с вагонами (составами) для целенаправленного выполнения операций технологического процесса.
По характеру работы маневры делятся на сортировочные -разъединительные по заранее установленным признакам, состоящие в расстановке вагонов, находящихся в составе, по разным путям для образования одинаковых по назначению групп; группцровочные- соединительные, заключающиеся в подборке вагонов (групп вагонов) с разных путей в состав в определенном порядке; перестановочные - для перестановки вагонов из парка в парк и с пути на путь, подачи (уборки) на местные пункты станции, подъездные пути и т.д., специальные - для осаживания вагонов в сортировочном парке, подтягивания, перемещения их при перевеске, промыке и т. д.
По назначению маневры подразделяются на операции: расформирование поездов, т. е. сортировка вагонов в соответствии с их назначением (для груженых транзитных - по назначениям плана формирования, груженых местных - по путям выгрузки, порожних - по роду вагонов, неисправных -по пунктам ремонта и т.д.); формирование - соединение вагонов в поездной состав в соответствии с планом формирования и расстановки их в соответствии с требованиями ПТЭ. Сортировка вагонов при формировании может и отсутствовать. Формируют поезда, как правило, одновременно с расформированием-сортировкой вагонов, т.е. совмещаются два наиболее трудоемких станционных процесса. Применение этого метода сокращает время на окончание формирования поездов или полностью его исключает; прицепка и отцепка вагонов от поездов; подача и уборка вагонов на различные грузовые и другие местные пункты станции; грузовые, выполняемые с вагонами погрузочно-выгрузочных пунктах станции (расстановка по грузовым фронтам, перестановка, сборка); прочие, применяемые для перестановки вагонов из парка в парк с какими-то специальными целями, подачи их на вагоно-ремонтные пункты, в депо, на пути для устранения коммерческого брака и т.д.
Технические средства и основные элементы маневровой работы
На станциях, где работает несколько маневровых локомотивов, путевое развитие разделяется на отдельные маневровые районы. Маневровые локомотивы специализируются для работы по конкретным районам с учетом специфики работы (массы расформировываемых и формируемых составов, формирования сборных, групповых поездов, подач на грузовые фронты, условий путевого развития и др.). Составительские бригады обучают применительно к работе в конкретных маневровых районах, учитывая существенное различие в способах, технологии и системе управления маневрами в разных районах. На многих станциях составительские бригады обучены для работы в нескольких маневровых районах, например, в горочном маневровом районе и районе маневровой работы на вытяжных путях.
Путевыми техническими средствами выполнения маневровой работы являются вытяжные пути (обычного и специального профиля) в совокупности со стрелочными горловинами, стрелочными улицами и примыкающими путями; горки малой, средней и большой мощности. Стрелочные переводы в районах маневровой работы на многих станциях оборудованы электроприводами, имеют рельсовые электрические цепи и включены в систему управления ЭЦ. Вытяжные пути, маневровые районы оборудуются стационарными колонками радиосвязи с машинистами маневровых локомотивов, переговорными колонками с ДСПП и ДСЦ, кроме того, у составителей есть переносные радиостанции.
Наиболее совершенными техническими средствами управления, механизации и автоматизации маневровой работы оборудованы сортировочные горки (ГАЦ, АРС, АЗСР, КЗП, все виды средств связи, эффективные средства торможения на I, II, III тормозных позициях, АРМ ДСП Г, операторов).
К маневровым средствам относятся маневровые и поездные локомотивы, тягачи, толкатели, электрошпили, электролебедки. Электрошпили, электролебедки, являясь стационарными установками, применяются для перемещения вагонов у складов, погрузочно-выгрузочных путей. На станциях магистральной сети перевод маневровой работы на тепловозную тягу практически завершен.
Для расформирования составов нередко используют отдельные серии тепловозов поездного движения. Локомотивы большой мощности необходимы при окончании формирования и перестановке составов из СИ в ПО. Для расформирования составов на некоторых сортировочных горках используют электровозы. Имеются конструктивные проработки и опытные образцы маневровых локомотивов двойного питания - дизель-электрических и контактно-аккумуляторных, которые при эффективной и экономичной конструкции могут найти применение на станциях электрифицированных железных дорог, поскольку ряд путей и парков таких станций не имеют контактной подвески и сооружать ее не везде целесообразно по условиям выполняемых работ и требований охраны труда.
Системы автоматизации маневровой работы используются пока только для сортировочных горок крупных станций. В будущем они должны найти применение на вытяжных путях по окончанию формирования и перестановке составов в ПО и в других маневровых районах.
Более широкое применение могут найти системы радиоуправления стрелочными переводами с маневрового локомотива.
В настоящее время в БелГУТе разрабатываются на микропроцессорной элементной базе переносные (наручные) АРМ для составителей, приемщиков поездов, операторов СТЦ и другого персонала, которые позволят оперативно, на месте производства работ воспринимать информацию путем непосредственного ввода, а затем в специально оборудованных местах переписывать эту информацию через штепсельные соединения в память ЭВМ в автоматизированных центрах управления железнодорожными узлами.
Маневровые передвижения для изучения и расчета времени выполнения (нормирования) расчленяют на отдельные элементы: полурейсы -маневровые передвижения локомо-
тива с вагонами (груженый полурейс) или без вагонов (холостой полурейс) без изменения направления движения и рейсы - маневровые передвижения с изменением направления движения (рис. 5.1). На рисунке приведена также диаграмма рейса, состоящего из двух полурейсов - вытягивания и осаживания. В каждом полурейсе разгон выполняется до скоростей  и
и  .Маневровые передвижения в зависимости от уклона пути, маневрового состава, наличия средств торможения на путях могут выполняться без включения автотормозов, когда торможение обеспечивается силами тормозов маневрового локомотива, и с включенными автотормозами (большие полурейсы со скоростью выше 25 км/ч).
.Маневровые передвижения в зависимости от уклона пути, маневрового состава, наличия средств торможения на путях могут выполняться без включения автотормозов, когда торможение обеспечивается силами тормозов маневрового локомотива, и с включенными автотормозами (большие полурейсы со скоростью выше 25 км/ч).
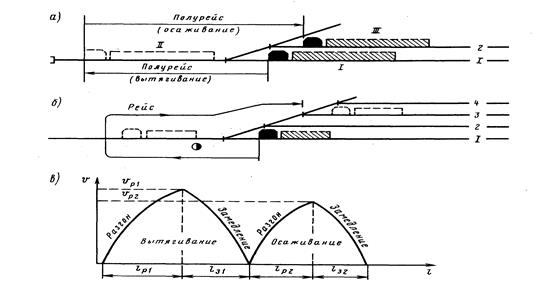
Рис. 5.1. Технологические графики полурейсов:
а-схема полурейса вытягивания и осаживания; б-схема рейса; в-диаграмма изменения скорости
при выполнении полурейсов
По режиму управления движением полурейсы могут быть различных типов. Их можно наглядно
изобразить в виде графиков функций (рис. 5.2):
 и
и  ,
,
где  - расстояние полурейса; т-число вагонов в маневровом составе;
- расстояние полурейса; т-число вагонов в маневровом составе;  -расстояние разгона;
-расстояние разгона;  -торможения,
-торможения,  -полурейса;
-полурейса;  -движения по инерции; tp-время на разгон;
-движения по инерции; tp-время на разгон;  -время на торможение.
-время на торможение.
Скорость разгона машинистом выбирается с учетом обеспечения безопасности работы в зависимости от длины полурейса и величины маневрового состава. Рассмотрим типы полурейсов и их графики (см. рис. 5.2).
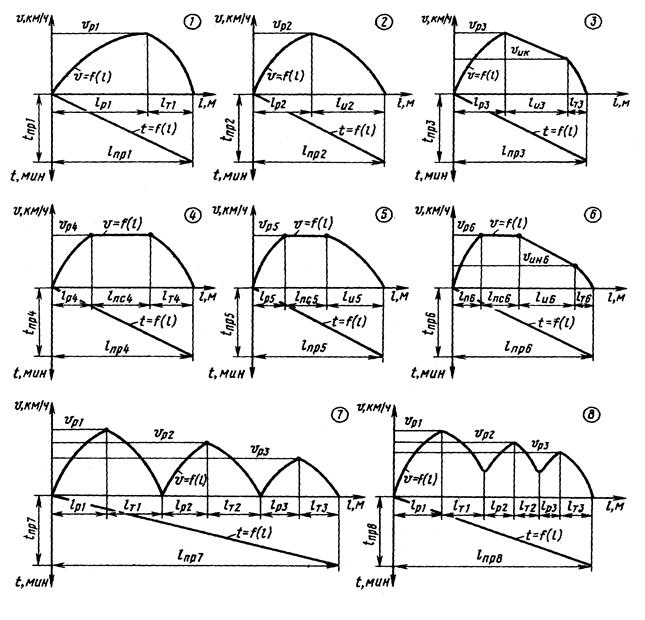
Рисунок 5.2 – Диаграммы основных видов полурейсов
Первый. По этому типу полурейса машинист выполняет передвижение с вагонами или без них, разгоняясь до некоторой скорости разгона  ,и затем сразу начинает торможение до полной остановки. При этом длина полурейса составляет
,и затем сразу начинает торможение до полной остановки. При этом длина полурейса составляет  и время
и время  .
.
Второй. Отличие этого типа маневрового передвижения от первого состоит в том, что машинист после достижения некоторой скорости разгона 
 отключает тягу, и далее движение идет по инерции до полной остановки. Этот тип полурейса, если позволяют условия, может применяться для экономии топлива.
отключает тягу, и далее движение идет по инерции до полной остановки. Этот тип полурейса, если позволяют условия, может применяться для экономии топлива.
Третий. Отличается от второго тем, что машинист после некоторого расстояния движения по инерции  далее применяет торможение для того, чтобы остановиться в необходимой точке пути.
далее применяет торможение для того, чтобы остановиться в необходимой точке пути.
Четвертый. Этот вид маневрового передвижения применяется в том случае, если длина полурейса достаточно велика. Сначала идет разгон до скорости  , затем на некотором расстоянии
, затем на некотором расстоянии  идет движение с постоянной скоростью
идет движение с постоянной скоростью  , а далее торможение для остановки в необходимой точке пути.
, а далее торможение для остановки в необходимой точке пути.
Пятый. Аналогичен предыдущему, и это видно из диаграммы, но в конце передвижения вместо торможения есть возможность двигаться по инерции до полной остановки маневрового состава.
Шестой аналогичен пятому с той лишь разницей, что для остановки в заданной точке после передвижения по инерции в конце применяется торможение.
Седьмой. Этот тип маневрового передвижения является более сложным: без изменения направления движения применяется несколько разгонов и несколько замедлений до полной остановки. Разгоны делаются до скоростей  , и т.д. и, как правило,
, и т.д. и, как правило,  .
.
Восьмой. Без изменения направления движения производится несколько разгонов и несколько (по числу разгонов) замедлений, однако торможение внутри полурейса выполняется не до полной остановки маневрового состава. За счет использования движения по инерции возможны варианты седьмого и восьмого типов полурейсов.
Время на выполнение основных составляющих полурейсов и полурейсов в целом нормируется в зависимости от длины маневрового передвижения, величины маневрового состава, скорости движения, уклонов пути и других факторов.
Для расчетов основных элементов полурейсов - времени разгона tp, расстояния разгона , времени торможения tT, расстояния торможения  , времени движения по инерции
, времени движения по инерции  и расстояния движения по инерции - может быть использован метод тяговых расчетов, основанный на использовании таких характеристик локомотивов, как сила тяги, мощность, а также сила сопротивления движению.
и расстояния движения по инерции - может быть использован метод тяговых расчетов, основанный на использовании таких характеристик локомотивов, как сила тяги, мощность, а также сила сопротивления движению.
Наибольшая скорость разгона v в полурейсе зависит от расчетной силы тяги локомотива, массы маневрового состава, удельных ускоряющей силы и сопротивления движению, а также дополнительного удельного сопротивления от кривых, стрелок, уклона пути и расстояния разгона, при котором эта скорость становится уже равновесной или постоянной. При этом чем больше масса маневрового состава, тем меньше при заданной мощности локомотива максимально возможная скорость его разгона. Наибольшую возможную скорость разгона маневрового состава vp определяют из условия соотношения мощности локомотива Nл, л. с, и силы тяги при установившейся скорости  , кгс:
, кгс:
 ,
,
где  - к. п. д. передачи локомотива (отношение мощности двигателей к касательной мощности на ободе ведущих колес; при тепловозной тяге и скорости, характерной для маневров, к. п. д. ≈ 0,8).
- к. п. д. передачи локомотива (отношение мощности двигателей к касательной мощности на ободе ведущих колес; при тепловозной тяге и скорости, характерной для маневров, к. п. д. ≈ 0,8).
При движении маневрового состава с установившейся скоростью условие равновесия сил тяги FK, кгс, и сопротивления, действующих на состав, можно выразить формулой:
 ,
,
где Р- масса локомотива в рабочем состоянии, т; QM-масса маневрового состава, т; w- суммарное удельное сопротивление движению, кгс/т;
 ,
,
 - удельное сопротивление движению соответственно основное и дополнительное от стрелок и кривых, кгс/т;
- удельное сопротивление движению соответственно основное и дополнительное от стрелок и кривых, кгс/т;  - коэффициенты основного удельного сопротивления маневрового состава w0 (вместе с локомотивом); рекомендуется принимать
- коэффициенты основного удельного сопротивления маневрового состава w0 (вместе с локомотивом); рекомендуется принимать  0,5 кгс/т;
0,5 кгс/т;  1,2;
1,2;  0,007;
0,007;  0,00015;
0,00015;  ;
;  - приведенный уклон пути,‰.
- приведенный уклон пути,‰.
Зависимость максимально возможной скорости разгона маневрового состава от его массы и мощности локомотива на горизонтальном пути ( = 0) можно выразить:
 .
.
Максимально возможные скорости разгона не всегда могут быть реализованы в полурейсах первых трех типов главным образом из-за недостаточного расстояния разгона, а в полурейсах четвертого-шестого типов - из-за ограничений скорости при маневрах.
Таким образом, нормирование маневров при помощи тяговых расчетов заключается в графическом или аналитическом определении времени элементов полурейса и его продолжительности, исходя из зависимости между силами тяги и сопротивления при маневровых передвижениях. С помощью аналитических тяговых расчетов обычно определяют лишь время и расстояние разгона и торможения (или замедления) при каждом полурейсе  и
и  . Они могут быть найдены по второму закону Ньютона следующим образом:
. Они могут быть найдены по второму закону Ньютона следующим образом:
 ,
,
где F-суммарная сила, действующая на маневровый состав и вызывающая егодвижение (сила тяги), кгс;  - ускорение маневрового состава.
- ускорение маневрового состава.
С учетом инерции вращающихся колес вагонов и локомотивов
 , (5.1)
, (5.1)
где g - ускорение свободного падения; v-коэффициент инерции вращающихся масс подвижного состава (для вагонного парка в среднем  ).
).
Средние значения удельной касательной силы тяги локомотива  , кгс/т, для каждого расчетного интервала скоростей и удельное значение силы сопротивления движению
, кгс/т, для каждого расчетного интервала скоростей и удельное значение силы сопротивления движению  , кгс/т, определяются:
, кгс/т, определяются:

 ,
,
где W-суммарное сопротивление движению маневрового состава, кгс.
Если маневровый состав находится в режиме торможения, на каждую тонну массы состава и локомотива действует удельная тормозная сила  , кгс/т:
, кгс/т:

где  - среднее значение суммарной тормозной силы в рассматриваемом диапазоне скоростей.
- среднее значение суммарной тормозной силы в рассматриваемом диапазоне скоростей.
Размерность F в формуле (5.1) зависит от размерностей составляющих ее элементов. Если массу локомотивов и маневрового состава принять в кг, а ускорение свободного падения g и ускорение движения dv/dt выразить в одной и той же размерности, то сила тяги F будет выражена в кг.
Алгебраическая сумма сил, кгс/т, действующих на маневровый состав, выражается уравнением
 ,
,
где Fк- касательная сила тяги локомотива, кгс/т.
Для условия FK - W>0 удельную ускоряющую силу на 1 т массы маневрового состава (с локомотивом) определяют:
 ,
,
где - удельная касательная сила тяги локомотива, кгс/т.
Отсюда
 .
.
Ускорение свободного падения можно выразить

Тогда
 .
.
Время разгона в полурейсах  , ч, определяется:
, ч, определяется:
 , (5.2)
, (5.2)
или в минутах
 . (5.3)
. (5.3)
В свою очередь, расстояние разгона в полурейсах 1-8 при равноускоренном движении , м, равно половине произведения ускорения на квадрат времени разгона и с учетом размерности составит:
 ,
,
а расстояние торможения , м, и время торможения , мин, соответственно:
 ; (5.4)
; (5.4)
 . (5.5)
. (5.5)
В полурейсах 2, 3, 5, 6 время движения по инерции , мин, составит
 . (5.6)
. (5.6)
а расстояние движения по инерции, м:
 . (5.7)
. (5.7)
В знаменателях формул (5.2)-(5.7) параметры полурейсов определены для горизонтального пути. Если профиль пути в районе маневров не горизонтальный, необходимо учесть ускорение (со знаком «-») или замедление (со знаком « + ») от уклона (  ).
).
Дата добавления: 2016-06-02; просмотров: 16146;